Résultats de la recherche pour "labs ratio n"
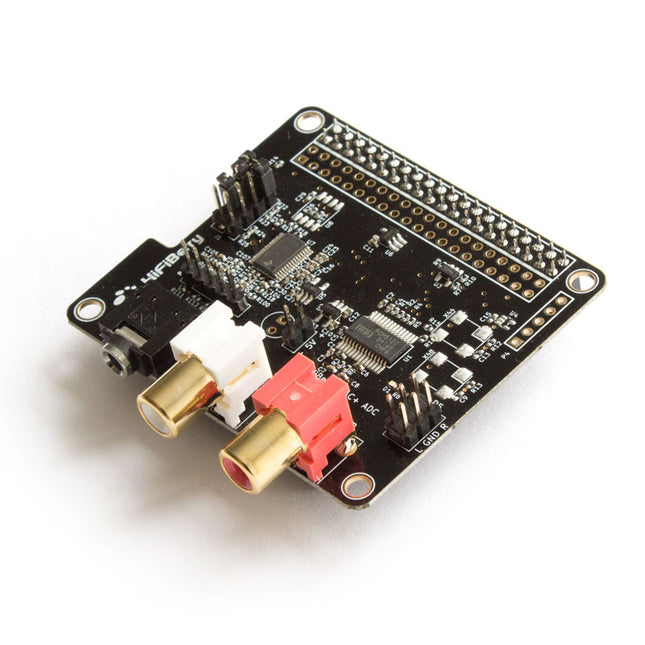
HiFiBerry HiFiBerry DAC+ ADC – convertisseur N/A et A/N pour RPi
Caractéristiques Entrée et sortie stéréo DAC Burr-Brown dédié 192 kHz / 24 bits de haute qualité CAN Burr-Brown dédié 192 kHz / 24 bits de haute qualité Contrôle du volume matériel pour DAC. Le volume de sortie peut être contrôlé à l'aide de « alsamixer » ou de toute application prenant en charge les commandes du mélangeur ALSA. Se connecte directement sur le Raspberry Pi. Aucune soudure requise. Compatible avec tous les modèles Raspberry Pi dotés d'un connecteur GPIO à 40 broches Aucune alimentation supplémentaire requise. Trois régulateurs de tension linéaires à très faible bruit. Conforme HAT, EEPROM pour configuration automatique. Connecteurs de sortie RCA plaqués or. Comprend des entretoises 4M 2,5 x 12 mm. Entrée analogique, prise téléphonique 3,5 mm Sortie analogique RCA Sortie analogique (P5) Cavalier de configuration d'entrée (J1) Connecteur pour entrée symétrique (P6) Veuillez noter : la disposition et les composants peuvent changer sans préavis. Connecteur d'entrée symétrique/asymétrique (P6) Le connecteur à 5 broches peut être utilisé pour connecter une entrée symétrique. Veuillez noter que l'entrée symétrique doit être sélectionnée avec les cavaliers et aura toujours un gain de 12 dB. Il ne doit pas être utilisé avec des entrées de niveau ligne. La broche 1 est à gauche. à droite + droite - GND gauche - gauche + Connecteur de sortie (P5) Le connecteur de sortie réalise des connexions à des composants externes comme un amplificateur. La broche 1 est en haut à gauche. +5V 1 2 R. GND 3 4 GND +5V 5 6 L Paramètres de gain d'entrée (J1) Le bloc cavalier est responsable de la configuration des entrées. Il est recommandé d'utiliser le paramètre par défaut sans gain d'entrée supplémentaire. Un gain de 32 dB peut être utilisé pour connecter des microphones dynamiques. Les cavaliers sont numérotés de haut en bas. 1 2 3 4 fonction 1 0 0 – Gain de 0 dB 0 1 1 – Gain de 12 dB 0 1 0 – Gain de 32 dB 0 0 1 – entrée symétrique, gain de 12 dB Caractéristiques Tension d'entrée maximale : 2,1 Vrms - 4,2 Vrms pour une entrée symétrique Tension de sortie maximale : 2,1 Vrms Rapport signal/bruit ADC : 110 dB Rapport signal/bruit DAC : 112 dB CAN THD+N : -93 dB DAC THD+N : -93 dB Tension d'entrée pour les distorsions les plus faibles : 0,8 Vrms Gain d'entrée (configurable avec des cavaliers) : 0 dB, 12 dB, 32 dB Consommation électrique : < 0,3 W Fréquences d'échantillonnage : 44,1 kHz - 192 kHz Pour utiliser le HiFiBerry DAC + ADC, votre noyau Linux Raspberry Pi doit être au minimum en version 4.18.12. Cliquez ici pour savoir comment mettre à jour le noyau du Raspberry Pi Utiliser des microphones avec le DAC+ ADC Le DAC+ ADC est équipé d'une entrée analogique stéréo qui peut être configurée pour une large gamme de tensions d'entrée. Il fonctionne mieux avec les sources analogiques de niveau ligne. Cependant, il est également possible de l'utiliser comme entrée microphone. Vous ne pouvez utiliser que des microphones dynamiques. Les microphones nécessitant une alimentation ne sont pas pris en charge. La tension de sortie du microphone est très faible. Cela signifie que vous devez l'amplifier. Le DAC+ ADC dispose déjà du préamplificateur nécessaire. Vous devrez régler correctement les cavaliers. Le son de l’entrée ne sera pas automatiquement lu sur la sortie. Vous devrez utiliser un logiciel qui lit l'entrée et la restitue. Définition des paramètres corrects de l'amplificateur d'entrée pour un microphone Par défaut, la sensibilité d'entrée est adaptée aux sources audio de niveau ligne. Cela se fait via un cavalier sur l'en-tête J1. Pour utiliser un microphone, le cavalier doit être configuré comme indiqué ci-dessous. Entrée audio vers sortie Il n'y a pas de connexion directe entre l'entrée et la sortie. Cela conduit à ce que l'entrée du microphone connecté ne soit pas restituée automatiquement. Si vous souhaitez l'entendre sur la sortie, vous devez utiliser l'outil de ligne de commande alsaloop peut être utilisé pour cela.
€ 99,95
Membres € 89,96
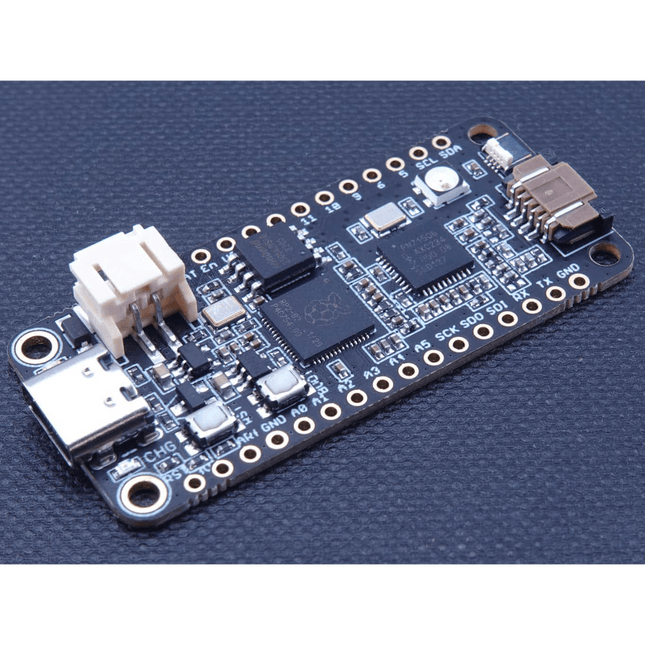
iLabs iLabs Challenger RP2040 NFC
Le Challenger RP2040 NFC est un petit ordinateur embarqué, équipé d'un contrôleur NFC intégré avancé (NXP PN7150), dans le format populaire Adafruit Feather. Il est basé sur une puce de microcontrôleur RP2040 de la Fondation Raspberry Pi qui est un Cortex-M0 double cœur pouvant fonctionner sur une horloge allant jusqu'à 133 MHz. NFC Le PN7150 est une solution de contrôleur NFC complète avec micrologiciel intégré et interface NCI conçue pour une communication sans contact à 13,56 MHz. Il est entièrement compatible avec les exigences du forum NFC et est largement conçu sur la base des enseignements tirés de la génération précédente d'appareils NXP NFC. C'est la solution idéale pour intégrer rapidement la technologie NFC dans n'importe quelle application, en particulier les petits systèmes embarqués réduisant la nomenclature (BOM). La conception intégrée avec une compatibilité totale avec le forum NFC offre à l'utilisateur toutes les fonctionnalités suivantes : Micrologiciel NFC intégré fournissant tous les protocoles NFC en tant que fonctionnalité pré-intégrée. Connexion directe à l'hôte principal ou au microcontrôleur, par bus physique I²C et protocole NCI. Consommation d'énergie ultra faible en mode boucle d'interrogation. Unité de gestion de l'énergie (PMU) intégrée très efficace permettant une alimentation directe à partir d'une batterie. Caractéristiques Microcontrôleur RP2040 de Raspberry Pi (Cortex-M0 double cœur 133 MHz) IPS Un canal SPI configuré I²C Deux canaux I²C configurés (I²C dédié pour le PN7150) UART Un canal UART configuré Entrées analogiques 4 canaux d'entrée analogiques Module NFC PN7150 de NXP Mémoire flash 8 Mo, 133 MHz Mémoire SRAM 264 Ko (divisé en 6 banques) Contrôleur USB 2.0 Jusqu'à 12 Mbit/s à pleine vitesse (USB 1.1 PHY intégré) Connecteur de batterie JST Pas de 2,0 mm Chargeur LiPo intégré Courant de charge standard de 450 mA Dimensions 51x23x3.2mm Poids 9g Remarque : l'antenne n'est pas incluse. Téléchargements Fiche de données Exemple de démarrage rapide
€ 22,95€ 17,95
Membres identique
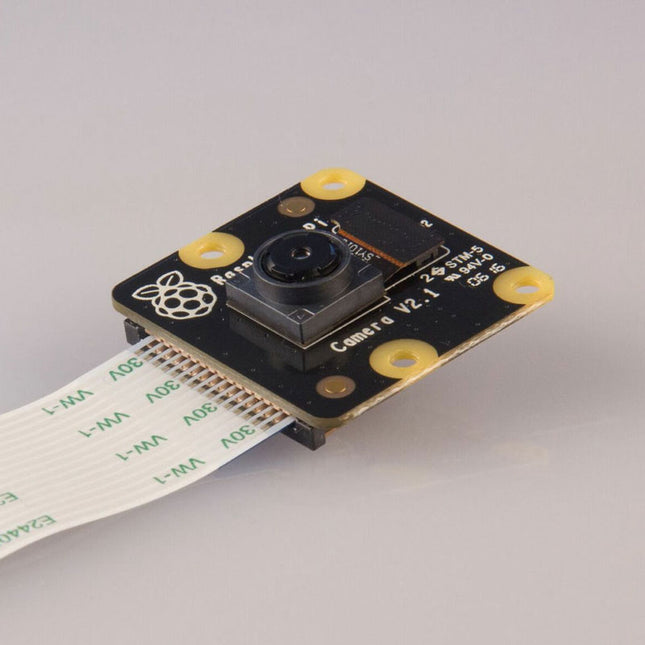
Raspberry Pi Foundation Module de caméra Raspberry Pi NoIR V2
Le module de caméra infrarouge Raspberry Pi (NoIR) V2 dispose d'un capteur Sony IMX219 de 8 mégapixels (par rapport au capteur OmniVision OV5647 de 5 mégapixels de la caméra d'origine). Le RPi NoIR vous offre tout ce qu'offre le module caméra classique, avec une différence : il n'utilise pas de filtre infrarouge (NoIR = No Infrared). Cela signifie que les photos que vous prenez à la lumière du jour auront l'air résolument curieuses, mais cela vous donne la possibilité de voir dans l'obscurité grâce à l'éclairage infrarouge. La caméra fonctionne avec tous les modèles de Raspberry Pi. Résolution fixe 8 mégapixels Modes vidéo 1080p30, 720p60 et 640x480p60/90 Intégration Linux Pilote V4L2 disponible API de programmation C OpenMAX IL et autres disponibles Capteur SonyIMX219 Résolution du capteur 3280 x 2464 pixels Zone d'image du capteur 3,68 x 2,76 mm (diagonale de 4,6 mm) Taille des pixels 1,12 x 1,12 µm Taille optique 1/4' Distance focale 3,04 mm Champ de vision horizontal 62,2 degrés Champ de vision vertical 48,8 degrés Rapport focal (F-Stop) 2.0 Poids 3g Taille 25x24x9mm
€ 29,95€ 26,95
Membres identique
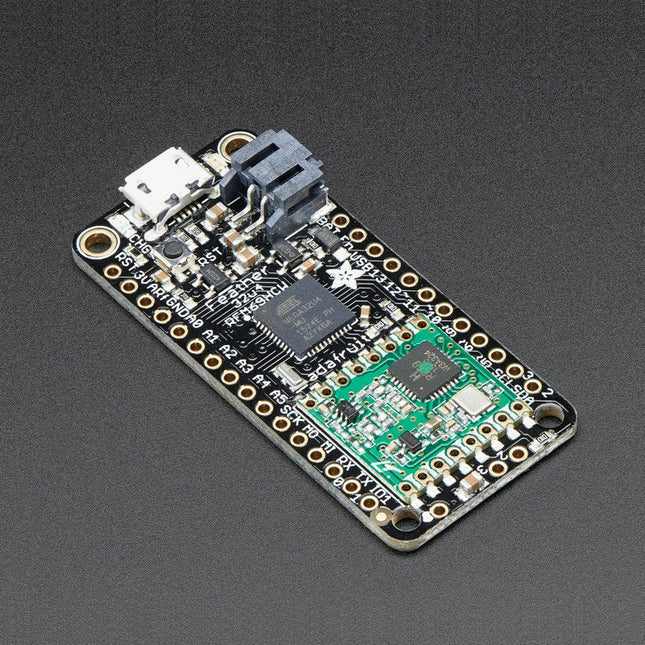
Adafruit Packet Radio RadioFruit : Feather 32u4 RFM69HCW (868 ou 915 MHz) d'Adafruit
Cette version radio 900 MHz peut être utilisée pour l'émission/réception à 868 MHz ou à 915 MHz ? la fréquence radio exacte est déterminée lorsque vous chargez le logiciel puisqu'elle peut être réglée de façon dynamique. Au c?ur du Feather 32u4 se trouve un ATmega32u4 cadencé à 8 MHz et à 3,3 V logique. Cette puce a 32 K de flash et 2 K de RAM, avec USB intégré, non seulement a une capacité de débogage de programme vec USB vers série intégrée sans avoir besoin d'une puce de type FTDI, mais elle peut également faire office de souris, de clavier, de dispositif MIDI USB, etc. Pour faciliter son utilisation dans le cadre de projets portables, nous avons ajouté un connecteur pour n'importe quelle batterie lithium-polymère de 3,7 V et intégré la charge de la batterie. Vous n'avez pas besoin de batterie, il fonctionnera très bien directement à partir du connecteur micro USB. Mais, si vous avez une batterie, vous pouvez la porter avec vous, puis brancher le connecteur USB pour la recharger. Le Feather basculera automatiquement vers l'alimentation USB dès qu'elle sera disponible. Nous avons également lié la batterie à travers un diviseur à une broche analogique, de sorte que vous pouvez mesurer et surveiller la tension de la batterie pour savoir quand vous avez besoin de la recharger. Caractéristiques Dimension 2,0 x 0,9 x 0,28 pouce (51 x 23 x 8 mm) sans les connecteurs soudées Léger comme une ( grande ?) plume - 5,5 g ATmega32u4 @ 8 MHz avec logique/alimentation 3.3 V Régulateur 3,3 V avec sortie de courant de crête de 500 mA Prise en charge de l'USB, livré avec un bootloader USB et débogage via port série Vous obtenez également des tonnes de broches - 20 broches GPIO Interface série, I²C, SPI 7x broches PWM 10x entrées analogiques Chargeur lipoly intégré de 100 mA avec LED d'indication de l'état de charge Pin #13 LED rouge pour le clignotement à usage général Broche d'alimentation/activation 4 trous de montage Bouton de réinitialisation La radio Feather 32u4 utilise l'espace restant pour ajouter un module radio RFM69HCW 868/915 MHz. Ces radios ne sont pas bonnes pour transmettre de l'audio ou de la vidéo, mais elles fonctionnent assez bien pour la transmission de petits paquets de données lorsque vous avez besoin de plus de portée que 2,4 GHz (BT, BLE, WiFi, ZigBee) Module basé sur le SX1231 avec interface SPI Radiocommunication par paquets avec des bibliothèques Arduino prêtes à l'emploi Utilise la bande ISM non soumise a des reglementation ("ISM européen" @ 868 MHz ou "ISM américain" @ 915 MHz) +13 à +20 dBm jusqu'à 100 mW de capacité de sortie de puissance (sortie de puissance sélectionnable par le logiciel) Appel de courant de 50 mA (+13 dBm) à 150 mA (+20 dBm) pour les transmissions Portée d'environ 350 mètres, selon les obstructions, la fréquence, l'antenne et la puissance de sortie Créer des réseaux multipoints avec des adresses de n?uds individuels Moteur de paquets cryptés avec AES-128 Antenne filaire simple ou point pour connecteur uFL Il est livré entièrement assemblé et testé, avec un bootloader USB qui vous permet de l'utiliser rapidement avec l'IDE Arduino. Des connecteurs sont également incluses pour que vous puissiez le souder et le brancher sur une platine d'essai sans soudure. Vous devrez couper et souder un petit morceau de fil (n'importe quel conducteur solide ou toronné est parfait) afin de créer votre antenne. La batterie Lipoly et le câble USB ne sont pas inclus.
€ 34,95
Membres € 31,46

Unitree Quadruped Go1 Edu Plus (NVIDIA NX)
La série Unitree Go1 se compose de robots quadrupèdes destinés à la recherche et au développement de systèmes autonomes dans les domaines de l'interaction homme-robot (HRI), du SLAM et du transport. Grâce à ses quatre pattes et à ses 12 DOF, ce robot peut évoluer sur une grande variété de terrains. Le Go1 est équipé d'un système d'entraînement et de gestion de l'énergie perfectionné, qui lui permet d'atteindre une vitesse (selon la version) de 3,7 m/s ou 11,88 km/h avec une autonomie de 2,5 heures. En outre, les moteurs ont un couple de 23,70 N.m au niveau du corps/des cuisses et de 35,55 N.m au niveau des genoux, ce qui permet également de faire des sauts ou des backflips. Charactéristiques Dynamique élevée 17 km/h Système intelligent de suivi latéral (ISS) Système super sensoriel (SSS) Détection à 10 vues Détection de l'IA, reconnaissance humaine, etc. Articulations flexibles et adaptatives Longue endurance Spécifications Léger et compact Poids : 12 kg Dimensions (plié) : 0,588 x 0,29 x 0,22 m Haute performance Vitesse maximale : 4,7 m/s (17 km/h ou 10,6 mph) Système de suivi latéral intelligent (adopte la technologie brevetée de positionnement et de contrôle vectoriel sans fil) Le chien robot peut marcher aux côtés de son propriétaire et pas seulement le suivre. L'interaction homme-machine est à la fois harmonieuse et sûre. Système super sensoriel Couverture complète de la vue 5 ensembles de caméras de profondeur stéréo à œil de poisson + post-traitement AI + 3 ensembles de capteurs hypersoniques Angle de l'objectif : 150 x 170° Puissante IA intégrée CPU + GPU à 16 cœurs (384 cœurs, 1,5 TFLOPS) L'ISS et le SSS fonctionnent en coopération Un système électrique solide et fiable Nouvelle articulation motorisée super légère, silencieuse et durable Système de refroidissement par caloducs intégré au moteur de l'articulation du genou Articulations corps/cuisse : C1-8 : 520 g 23,70 N.m Articulation du genou : C1-8 x 1,5 ratio 35,55 N.m Unitree Go1 variantes La série Go1 comporte 3 variantes (Go1 Air, Go1 Pro et Go1 Edu), qui diffèrent légèrement sur le plan technique. Les différences se situent principalement au niveau des processeurs et des systèmes de capteurs, la variante Air et Pro fonctionne, selon le modèle, avec un ou 3x (4x 1,43 GHz 128 Cœurs 0,5 T) processeur ainsi qu'avec 1 ou 5 super systèmes de capteurs. Les deux variantes sont équipées de 3 capteurs à ultrasons. La variante Go1 Edu possède jusqu'à 3 nano-processeurs, 5 systèmes de super-capteurs et 4 capteurs à ultrasons. En revanche, Edu Plus est équipé par défaut d'un Nvidia Jetson Xavier NX. Comparaison des modèles Go1 Air Go1 Pro Go1 Edu Go1 Edu Plus SSS 1 Système de superdétection 1 ensemble 5 ensembles 5 ensembles 5 ensembles Calcul de détection 1x (4x 1,43 GHz 128 Cœurs 0,5 T) 3x (4x 1,43 GHz 128 Cœurs 0,5 T) 3 Jetson Nano 2 Jetson Nano + 1 NVIDIA Jetson NX ISS 1 Concomitante intelligente ✓ ✓ ✓ ✓ RTT 1 Transaction d'images ✓ ✓ ✓ ✓ Chargeur 24 V, 4 V 24 V, 6 V 24 V, 6 V 24 V, 6 V Commande à distance ✓ ✓ ✓ ✓ Chargement ≈3 kg ≈3 kg ≈5 kg (max ~10 kg) ≈5 kg (max ~10 kg) Dissipation de la chaleur assistée par caloducs ✓ ✓ ✓ ✓ Vitesse de mouvement 0~2,5 m/s 0~3,5 m/s 0~3,7 m/s (max ~5 m/s) 0~3,7 m/s (max ~5 m/s) Batterie 1x 1x 1x 1x Interface de programmation graphique ✓ ✓ ✓ ✓ Interface de programmation scientifique ✓ ✓ Interface de programmation Python ✓ ✓ HAI 1 Détection humaine ✓ ✓ Vue du dessus de l'APP ✓ ✓ ✓ 4G ✓ ✓ Capteur de force physique à l'extrémité du pied ✓ ✓ Interface d'extension périphérique multifonctionnelle ✓ ✓ Radar 2D ou 3D au choix 2D ou 3D au choix Inclus 1x Unitree Go1 1x Unitree Go1 Batterie 1x Unitree Go1 Charger 1x Unitree Go1 Télécommande Téléchargements Guide de l’utilisateur GitHub
€ 14.399,00
Membres identique

PeakTech Alimentation CC PeakTech 6080 A (15 V, 3 A)
Grâce à la technologie linéaire utilisée, ce modèle ne génère aucune interférence haute fréquence et un transformateur de sécurité, conforme à la norme EN-61558-2-6, a également été utilisé, qui produit une très basse tension de sécurité (SELV) pour garantir sécurité maximale des utilisateurs. Cette alimentation au design moderne a été spécialement conçue pour le secteur des services et de l'éducation et a convaincu par son excellent rapport qualité/prix. Unité d'alimentation de laboratoire DC à régulation linéaire Protection contre les surcharges et résistant aux courts-circuits Affichage numérique bleu à 4 chiffres pour le courant et la tension Douilles de sécurité 4 mm Refroidissement passif / conception du boîtier sans ventilateur Transformateur de sécurité pour SELV selon EN-61558-2-6 Sécurité : EN-61010-1 Accessoires : cordon d'alimentation et mode d'emploi
€ 84,95
Membres € 76,46

Elektor Digital Elektor Janvier/Février 2022 (PDF)
COMMANDE DE MOTEURS : LES PONTS EN HIntroduction aux moteurs CC, pas à pas et sans balaisL'ÉQUIPE D'ELEKTOR LABNotre approche, nos outils préférés et plus encoreRASPBERRY PI COMME TÉLÉCOMMANDE KVMTest du logiciel Pi-KVMIQAUDIO CODEC ZEROCarte son au format Raspberry Pi ZeroLE PROJET PIKVM ET SES ENSEIGNEMENTSEntretien avec Maxim DevaevVÉHICULE AUTONOME AVEC LIDAR 2DUn ESP32 Pico interprète les données du lidarLE RASPBERRY PI ZERO 2 W PASSE AU QUADRICOEURNOTES DU FORUM MONDIAL DE L'ÉLECTRONIQUE ÉTHIQUE 2021COMMANDE DE MONTEURLa commande des moteurs devient simpleMOTEURS ÉLECTRIQUES DE GRANDE TAILLEPrincipes de base et informations utilesPRISE EN MAIN DU MICROCONTRÔLEUR ESP32-C3 RISC-VPROTÉGEZ-VOUS ET PROTÉGEZ LES AUTRES !Interrupteur général pour paillasse (DIY)CRÉATION D'INTERFACES GRAPHIQUES EN PYTHON ÈME 2Mon nom n'est pas BondGAGNANTS DU CONCOURS FAST FORWARD 2021 DU SALON PRODUCTRONICATESTEUR DE SERVO POLYVALENTVérification du comportement en l'absence de fiche techniqueMODBUS SANS FIL (PARTIE 2)Logiciel de la carte Modbus TCP sans filVOYAGE DANS LES RÉSEAUX NEURONAUX (3E PARTIE)Les neurones pratiquesDANS L'INTIMITÉ D'UN PROCESSEUR OPEN SOURCEExtrait : résultats des FPGA Lattice et XilinxDÉMARRER EN ÉLECTRONIQUE... (10)Toujours la bobine, mais avec ses applications pratiques dans l'audio.PROJET 2.0Corrections, mises à jour et courriers des lecteursDE LA COULEUR AUSONComment exploiter un capteur de couleurs avec l'I2CSOURCEMÈTRE BATTLAB-ONEMesurer et optimiser la durée de vie des batteries des appareils IdOTRACEUR DE FUITES À LA TERRE SIMPLEMesure de l'isolation du secteurPAUVRETÉ ET ÉLECTRONIQUEQuand le courant économique passe malHEXADOKUcasse-tête pour elektorniciens
€ 10,95
Membres € 9,86

Elektor Janvier/Février 2022
COMMANDE DE MOTEURS : LES PONTS EN HIntroduction aux moteurs CC, pas à pas et sans balaisL'ÉQUIPE D'ELEKTOR LABNotre approche, nos outils préférés et plus encoreRASPBERRY PI COMME TÉLÉCOMMANDE KVMTest du logiciel Pi-KVMIQAUDIO CODEC ZEROCarte son au format Raspberry Pi ZeroLE PROJET PIKVM ET SES ENSEIGNEMENTSEntretien avec Maxim DevaevVÉHICULE AUTONOME AVEC LIDAR 2DUn ESP32 Pico interprète les données du lidarLE RASPBERRY PI ZERO 2 W PASSE AU QUADRICOEURNOTES DU FORUM MONDIAL DE L'ÉLECTRONIQUE ÉTHIQUE 2021COMMANDE DE MONTEURLa commande des moteurs devient simpleMOTEURS ÉLECTRIQUES DE GRANDE TAILLEPrincipes de base et informations utilesPRISE EN MAIN DU MICROCONTRÔLEUR ESP32-C3 RISC-VPROTÉGEZ-VOUS ET PROTÉGEZ LES AUTRES !Interrupteur général pour paillasse (DIY)CRÉATION D'INTERFACES GRAPHIQUES EN PYTHON ÈME 2Mon nom n'est pas BondGAGNANTS DU CONCOURS FAST FORWARD 2021 DU SALON PRODUCTRONICATESTEUR DE SERVO POLYVALENTVérification du comportement en l'absence de fiche techniqueMODBUS SANS FIL (PARTIE 2)Logiciel de la carte Modbus TCP sans filVOYAGE DANS LES RÉSEAUX NEURONAUX (3E PARTIE)Les neurones pratiquesDANS L'INTIMITÉ D'UN PROCESSEUR OPEN SOURCEExtrait : résultats des FPGA Lattice et XilinxDÉMARRER EN ÉLECTRONIQUE... (10)Toujours la bobine, mais avec ses applications pratiques dans l'audio.PROJET 2.0Corrections, mises à jour et courriers des lecteursDE LA COULEUR AUSONComment exploiter un capteur de couleurs avec l'I2CSOURCEMÈTRE BATTLAB-ONEMesurer et optimiser la durée de vie des batteries des appareils IdOTRACEUR DE FUITES À LA TERRE SIMPLEMesure de l'isolation du secteurPAUVRETÉ ET ÉLECTRONIQUEQuand le courant économique passe malHEXADOKUcasse-tête pour elektorniciens
€ 15,50
Membres € 13,95
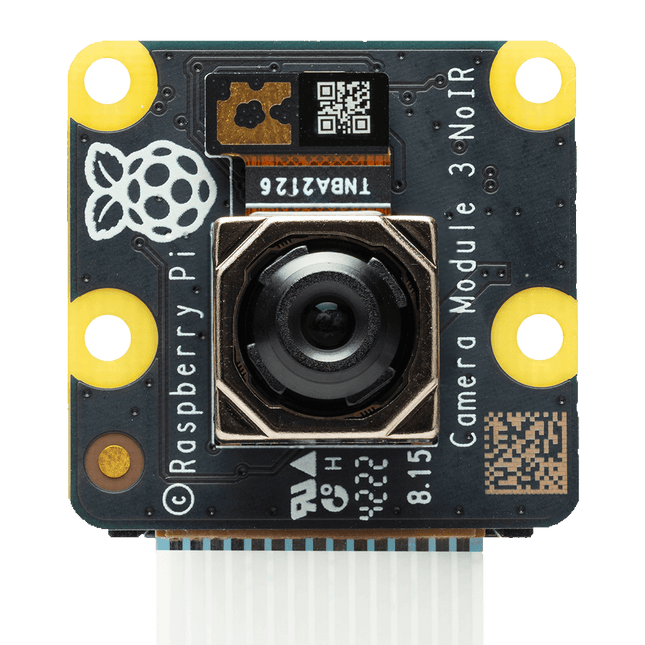
Raspberry Pi Foundation Module caméra Raspberry Pi 3 NoIR
Le module Caméra Raspberry Pi 3 est un appareil photo compact de Raspberry Pi. Il est doté d'un capteur IMX708 de 12 mégapixels avec HDR et d'un autofocus à détection de phase. Le Camera Module 3 est disponible en version standard et en version grand angle, toutes deux avec ou sans filtre infrarouge. Le Camera Module 3 peut être utilisé pour prendre des vidéos full HD ainsi que des photos, et dispose d'un mode HDR jusqu'à 3 mégapixels. Son fonctionnement est entièrement pris en charge par la bibliothèque libcamera, y compris la fonction d'autofocus rapide de Camera Module 3 : cela le rend facile à utiliser pour les débutants, tout en offrant beaucoup pour les utilisateurs avancés. Camera Module 3 est compatible avec tous les ordinateurs Raspberry Pi. Toutes les variantes du module caméra Raspberry Pi 3 possèdent : Capteur d'image CMOS 12 mégapixels rétro-éclairé et empilé (Sony IMX708) Rapport signal/bruit (SNR) élevé Correction dynamique des pixels défectueux (DPC) intégrée en 2D Autofocus à détection de phase (PDAF) pour un autofocus rapide Fonction de re-mosaïque QBC Mode HDR (jusqu'à 3 mégapixels en sortie) Sortie de données série CSI-2 Communication série 2 fils (supporte le mode rapide I²C et le mode rapide plus) Contrôle série 2 fils du mécanisme de mise au point Caractéristiques Capteur Sony IMX708 Résolution 11,9 MP Taille du capteur Diagonale du capteur 7,4 mm Taille de pixel 1,4 x 1,4 µm Horizontal/vertical 4608 x 2592 pixels Modes vidéo communs 1080p50, 720p100, 480p120 Sortie RAW10 Filtre anti-IR Intégré dans les variantes standard ; non présent dans les variantes NoIR Système autofocus Autofocus avec détection de phase Longueur du câble ruban 200 mm Connecteur de câble 15 x 1 mm FPC Dimensions 25 x 24 x 11,5 mm (hauteur 12,4 mm) Variantes du module caméra Raspberry Pi 3 Module Caméra 3 Module Caméra 3 NoIR Module Caméra 3 Wide Module Caméra 3 Wide NoIR Plage de mise au point 10 cm - ∞ 10 cm - ∞ 5 cm - ∞ 5 cm - ∞ Longueur focale 4,74 mm 4,74 mm 2,75 mm 2,75 mm Champ de vision diagonal 75 degrés 75 degrés 120 degrés 120 degrés Champ de vision horizontal 66 degrés 66 degrés 102 degrés 102 degrés Champ de vision vertical 41 degrés 41 degrés 67 degrés 67 degrés Rapport focal (F-stop) F1.8 F1.8 F2.2 F2.2 Sensible aux infrarouges Non Oui Non Oui Téléchargements GitHub Documentation
€ 32,95
Membres identique
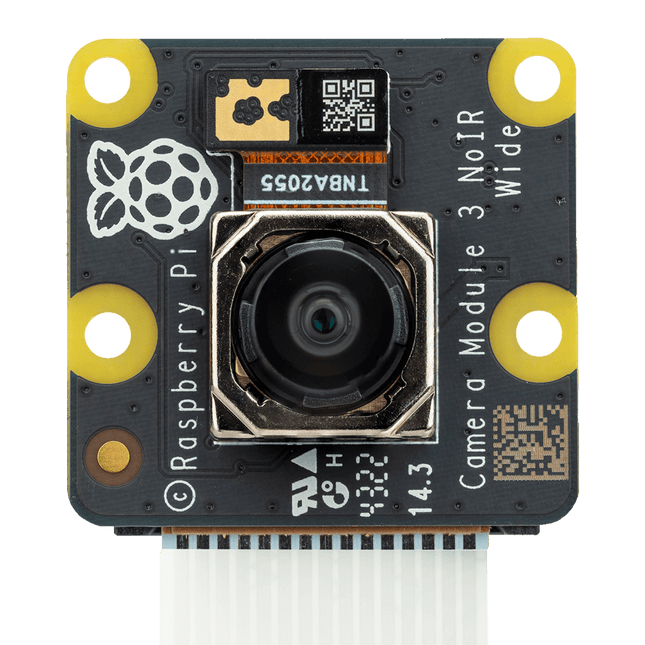
Raspberry Pi Foundation Module caméra Raspberry Pi 3 large NoIR
Le module Caméra Raspberry Pi 3 est un appareil photo compact de Raspberry Pi. Il est doté d'un capteur IMX708 de 12 mégapixels avec HDR et d'un autofocus à détection de phase. Le Camera Module 3 est disponible en version standard et en version grand angle, toutes deux avec ou sans filtre infrarouge. Le Camera Module 3 peut être utilisé pour prendre des vidéos full HD ainsi que des photos, et dispose d'un mode HDR jusqu'à 3 mégapixels. Son fonctionnement est entièrement pris en charge par la bibliothèque libcamera, y compris la fonction d'autofocus rapide de Camera Module 3 : cela le rend facile à utiliser pour les débutants, tout en offrant beaucoup pour les utilisateurs avancés. Camera Module 3 est compatible avec tous les ordinateurs Raspberry Pi. Toutes les variantes du module caméra Raspberry Pi 3 possèdent : Capteur d'image CMOS 12 mégapixels rétro-éclairé et empilé (Sony IMX708) Rapport signal/bruit (SNR) élevé Correction dynamique des pixels défectueux (DPC) intégrée en 2D Autofocus à détection de phase (PDAF) pour un autofocus rapide Fonction de re-mosaïque QBC Mode HDR (jusqu'à 3 mégapixels en sortie) Sortie de données série CSI-2 Communication série 2 fils (supporte le mode rapide I²C et le mode rapide plus) Contrôle série 2 fils du mécanisme de mise au point Caractéristiques Capteur Sony IMX708 Résolution 11,9 MP Taille du capteur Diagonale du capteur 7,4 mm Taille de pixel 1,4 x 1,4 µm Horizontal/vertical 4608 x 2592 pixels Modes vidéo communs 1080p50, 720p100, 480p120 Sortie RAW10 Filtre anti-IR Intégré dans les variantes standard ; non présent dans les variantes NoIR Système autofocus Autofocus avec détection de phase Longueur du câble ruban 200 mm Connecteur de câble 15 x 1 mm FPC Dimensions 25 x 24 x 11,5 mm (hauteur 12,4 mm) Variantes du module caméra Raspberry Pi 3 Module Caméra 3 Module Caméra 3 NoIR Module Caméra 3 Wide Module Caméra 3 Wide NoIR Plage de mise au point 10 cm - ∞ 10 cm - ∞ 5 cm - ∞ 5 cm - ∞ Longueur focale 4,74 mm 4,74 mm 2,75 mm 2,75 mm Champ de vision diagonal 75 degrés 75 degrés 120 degrés 120 degrés Champ de vision horizontal 66 degrés 66 degrés 102 degrés 102 degrés Champ de vision vertical 41 degrés 41 degrés 67 degrés 67 degrés Rapport focal (F-stop) F1.8 F1.8 F2.2 F2.2 Sensible aux infrarouges Non Oui Non Oui Téléchargements GitHub Documentation
€ 42,95
Membres identique

Elektor Digital Elektor Janvier/Février 2020 (PDF)
GUI tactiles – pour ESP32, RPi & Co.interfaces graphiques utilisateur avec la bibliothèque LittlevGL« pas seulement un projet comme un autre »Entretien avec Gábor Kiss-Vámosi, le développeur de LittlevGLCapaci-Meteraffichage à LED de type Dekatron sur deux chiffresCocomment fifiltrer les rerebonds d'un concontact mémécanique ?Un interrupteur est soit ouvert, soit fermé, n'est-ce pas ?filtres analogiques : quelques basesla magie des réseaux de filtrage est l'un des phénomènes les plus saisissants de l'électroniquebureau d'études - zone DDéveloppement en coursstation de surveillance de rayonnement ionisantPublie les données de 2 tubes Geiger sur les plates-formes IdOmultitâche en pratique avec l'ESP32programmation de tâches avec FreeRTOS et l'EDI Arduinomises au point & mises à jourCorrections – questions – réponsesaméliorer soi-même les phares de son auto ?Légal ou illégal, ce n'est pas égal !BANC D'ESSAI : station de soudage numérique ToolcraftArduino Pro IDE : mes premières impressionsComparaison de deux caméras de vision thermiqueexpérience vécueinstaller un labo et un atelier d'électroniqueélectronique analogiqueÉtude de cas nº 1 - Section 1 : microphone MEMS... 1-2-3 test 1-2-3minuterie d'infusion de théExercice de récupération d'énergie avec convertisseur thermoélectriquevariateur pour moteur monophasé 1 kWTrois modes de fonctionnement : commutation de cycle intégral, découpage de phase en début ou en fin de demi-périodeafficheur tactile 3,5 pouces rapide pour Raspberry PiParfait pour la vidéo, mais pas plus cherce labo-ci n'est pas ce labo-làmontre-moi ton labo, je te dirai qui tu es.Premiers pas avec RISC-VEssai de la carte LoFiveun géotraceur LoRa défie Elektor LabsPetits tracas du concepteur avec leur solution en geléeSigfox : un renard sur l'internet des objets (2)Inscription au réseau Sigfoxdémarrer en électronique... est plus facile qu'on ne l'imagine !retour des petits circuits…et des bonnes petites idées de projets Elektorvéhicules autonomes : où nous mènent-ils ?L'état de l'art (abrégé)Innovation 4.0 : dialogue d'innovateurs et d'entrepreneursCoffret Lego électronique, millésime 1968Les jouets électroniques fascinent encore 50 ans plus tardça dépasse l'électroniqueJauger un pont pour jauger la villeHexadoku – casse-tête pour elektorniciens
€ 10,95
Membres € 9,86
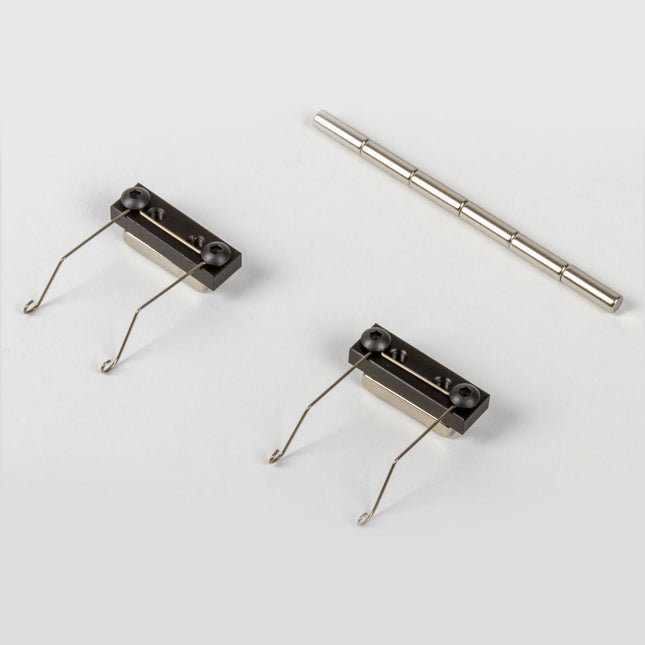
Evil Mad Science Ensemble d'aimants et de clips de maintien pour AxiDraw
L'ensemble d'aimants et de clips à ressort est conçu pour être utilisé avec les tableaux de chevalet magnétiques AxiDraw pour les formats lettre/A4 et tabloïd/A3, mais peut être utilisé avec presque toutes les surfaces magnétiques. L'ensemble comprend une paire de pinces à ressort spéciales avec bases magnétiques, ainsi que six aimants fins pour maintenir le papier. Les deux pinces à ressort spéciales ont chacune deux dents incurvées qui appliquent une légère pression sur votre papier. Ils vous permettent de faire glisser le papier directement vers l'intérieur et l'extérieur, rapidement et facilement, sans toucher aux aimants, aux clips ou au ruban adhésif. Ils ont une longue portée pour être positionnés derrière les règles de nos chevalets magnétiques. Les bases magnétiques vous permettent de les positionner là où vous en avez besoin. Deux de ces pinces à ressort exercent juste assez de pression pour maintenir une feuille de papier stable pendant que vous écrivez ou dessinez dessus. Cet ensemble comprend également six aimants cylindriques de 4 mm de diamètre et 10 mm de hauteur, faciles à positionner et qui maintiennent fermement le papier. Leur rapport d'aspect élevé les rend particulièrement faciles à saisir (contrairement aux disques magnétiques). Peut-être plus important encore, ils ont tendance à céder et à basculer s'ils sont touchés par une pointe de stylo errante, plutôt que de tenir si vite qu'ils pourraient endommager votre stylo ou déplacer votre papier.
€ 17,95
Membres € 16,16











