Robotique
-
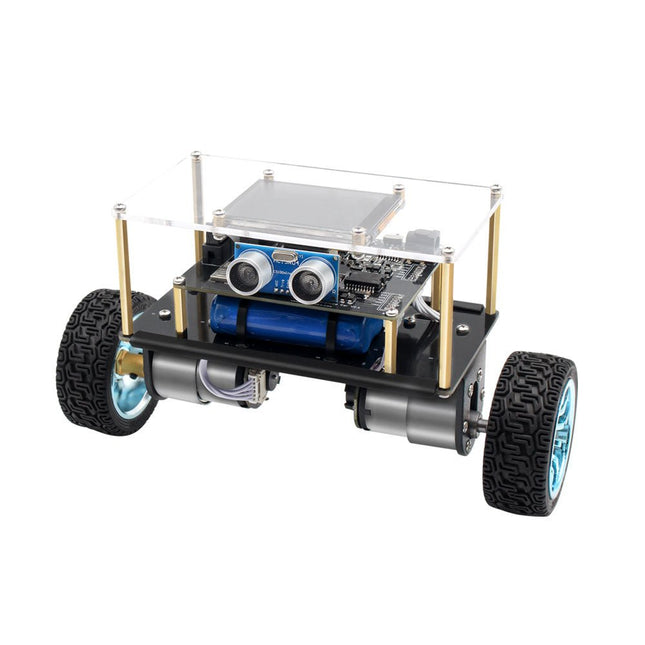
Elektor Labs Elektor Mini-Wheelie Robot auto-équilibrant
Robot à équilibrage sur deux roues compatible Arduino et alimenté par ESP32 L'Elektor Mini-Wheelie est une plateforme robotique expérimentale autonome et auto-équilibrée. Basé sur un microcontrôleur ESP32-S3, le robot auto-équilibré est entièrement programmable à l'aide de l'environnement Arduino et de bibliothèques open source. Ses capacités sans fil lui permettent d'être contrôlé à distance via Wi-Fi, Bluetooth ou ESP-NOW ou de communiquer avec un utilisateur ou même un autre robot. Un transducteur à ultrasons est disponible pour détecter les obstacles. Son écran couleur peut être utilisé pour afficher de jolies expressions faciales ou, pour les utilisateurs les plus terre-à-terre, des messages de débogage énigmatiques. Le robot est livré en kit complet avec des pièces à assembler soi-même. Tout est inclus, même un tournevis. Remarque : Le Mini-Wheelie est une plateforme de développement pédagogique destinée à l'apprentissage, à l'expérimentation et au développement de la robotique. Il n'est pas considéré comme un jouet pour enfants, et ses caractéristiques, sa documentation et le public auquel il s'adresse reflètent cet objectif. Le produit est destiné aux étudiants, aux éducateurs et aux développeurs qui souhaitent explorer la robotique, la programmation et l'intégration de matériel dans un cadre éducatif. Spécifications Microcontrôleur ESP32-S3 avec Wi-Fi et Bluetooth MPU6050 unité de mesure inertielle (IMU) à 6 axes Deux moteurs électriques 12 V à commande indépendante avec tachymètre Transducteur à ultrasons Écran couleur TFT 2,9 pouces (320 x 240) Emplacement pour carte MicroSD Moniteur de puissance de la batterie Batterie Li-Po rechargeable 3S (11,1 V/2200 mAh) Chargeur de batterie inclus Logiciel Open Source basé sur Arduino Dimensions (L x L x H) : 23 x 8 x 13 cm Inclus 1x Carte mère ESP32-S3 + module MPU6050 1x Carte LCD (2,9 pouces) 1x Capteur à ultrasons 1x Batterie (2200 mAh) 1x Chargeur de batterie 1x Kit de pneus moteur 1x Tableau de caisse 1x Tableau acrylique 1x Tournevis 1x Bande de protection 1x Câble flexible B (8 cm) 1x Câble flexible A (12 cm) 1x Câble flexible C 4x Colonnes A en cuivre (25 mm) 4x Colonnes B en cuivre (55 mm) 4x Colonnes C en cuivre (5 mm) 2x Colonnes en plastique et nylon 8x Vis A (10 mm) 24 Vis B (M3x5) 8x Noix 24x Rondelles métalliques 2x Attaches zippées 1x Carte MicroSD (32 Go) Téléchargements Documentation
-
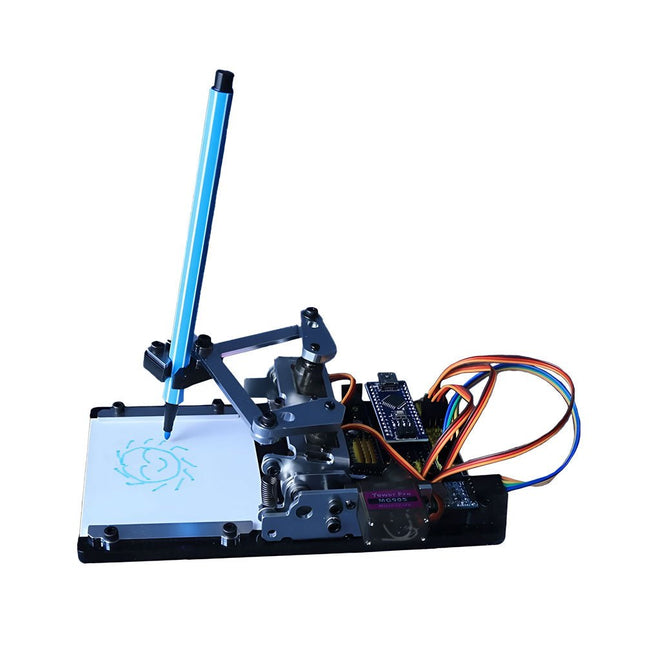
Generic Robot dessinateur contrôlé par Arduino
Ce kit de bras robot traceur polyvalent pour Arduino est équipé de servomoteurs à engrenages métalliques MG90S pour assurer des mouvements de dessin précis et stables. Caractéristiques Entièrement compatible avec l'Arduino IDE, inclut le code source complet pour un développement et une personnalisation faciles. Équipé de servomoteurs à engrenages métalliques MG90S robustes pour plus de précision et de durabilité. Inclut un module Bluetooth permettant un fonctionnement sans fil via une application dédiée. L'embout du bras robotisé spécialement conçu maintient fermement les stylos ou marqueurs d'un diamètre de 8 à 10 mm, idéal pour les croquis et les dessins détaillés. Inclus Carte Nano compatible Arduino Carte d'extension Nano Module Bluetooth Servomoteurs à engrenages entièrement métalliques MG90S Cadre en aluminium Plaque de base stable et épaisse Vis et accessoires de fixation Câbles de connexion Câble de données USB
-

Unitree Unitree Go2 Pro Robot quadrupède
Retard temporaire dans la livraison des robots Unitree Comme de nombreux autres fournisseurs, nous rencontrons actuellement des retards dans la livraison des robots Unitree. Un envoi de notre fournisseur est actuellement bloqué en douane, ce qui entraîne un retard dans la livraison des commandes déjà passées. Nous travaillons activement avec notre fournisseur pour résoudre ce problème et espérons obtenir plus de clarté bientôt, mais nous ne pouvons malheureusement pas garantir de délais précis pour le moment. Un nouvel envoi est également en cours d'acheminement, mais il faudra un certain temps avant qu'il n'arrive. Comme d'autres fournisseurs rencontrent les mêmes difficultés, changer de prestataire ne permettrait pas d’obtenir une solution plus rapide. Notre priorité est d’honorer les commandes existantes. Si vous avez des questions ou souhaitez modifier votre commande, n’hésitez pas à contacter notre service client. Nous vous tiendrons informés des prochains développements. La série Unitree Go2 se compose de robots quadrupèdes destinés à la recherche et au développement de systèmes autonomes dans les domaines de l'interaction homme-robot (HRI), du SLAM et du transport. Grâce à ses quatre pattes et à ses 12 degrés de liberté, ce robot peut évoluer sur des terrains variés. Le Go2 est équipé d'un système perfectionné de gestion de l'entraînement et de la puissance, qui permet une vitesse (selon la version) allant jusqu'à 3,7 m/s ou 11,88 km/h, avec une autonomie pouvant atteindre 4 heures. De plus, les moteurs ont un couple de 45 N.m au niveau du corps/des cuisses et des genoux, ce qui permet également des sauts ou des saltos arrière. Caractéristiques Système de reconnaissance ultra-performant : LIDAR 4D L1 Vitesse de course maximale : environ 5 m/s Couple d'articulation maximal : environ 45 N.m Module sans fil : Wi-Fi 6/Bluetooth/4G Autonomie ultra-longue : environ 2 à 4 h (longue durée de vie mesurée en conditions réelles) Système de suivi latéral intelligent : ISS 2.0 Spécifications Module de suivi : Suivi automatique ou télécommandé Caméra frontale : Résolution de transmission d'image : 1280 x 720, champ de vision : 120°, objectif ultra grand angle pour une clarté exceptionnelle. Feu avant : Éclaire intensément la route. LiDAR 4D L1 : Balayage omnidirectionnel ultra grand angle 360° x 90° permettant un évitement automatique avec un angle mort réduit et un fonctionnement stable. 12 moteurs d'articulation : Robuste et puissant, élégant et simple, une expérience visuelle inédite. Microphone interphone : Communication efficace sans restriction de scénario. Sangle auto-rétractable : Facile à transporter et à charger. Plus stable, plus puissant grâce à des appareils avancés. LiDAR 3D, carte ESIM 4G, Wi-Fi 6 bi-bande, Bluetooth 5.2 pour une connexion stable et un contrôle à distance. Puissant cœur de calcul : contrôleur de mouvement, processeur ARM hautes performances, processeur à algorithme d'intelligence artificielle amélioré, ORIN NX/NANO externe. Batterie intelligente : batterie standard de 8000 mAh, batterie longue durée de 15000 mAh, protection contre les surchauffes, les surcharges et les courts-circuits. Haut-parleur pour écouter de la musique : écoutez votre musique comme bon vous semble. Variantes de l'Unitree Go2 Le Go2 impressionne non seulement par ses capacités techniques, mais aussi par son design moderne et fin qui lui confère un look futuriste et attire tous les regards. Le Go2 Air est spécialement conçu pour les démonstrations et les présentations. Grâce à ses fonctionnalités de base, il offre une base solide pour démontrer les capacités de mouvement et les fonctionnalités d'un robot à quatre pattes. Important : Le Go2 Air est livré sans contrôleur. Celui-ci est disponible en option. Équipés d'un puissant processeur 8 cœurs hautes performances, les modèles Pro et Edu offrent une puissance de calcul impressionnante, indispensable aux tâches complexes et aux calculs exigeants. Cela permet un traitement des données plus rapide et plus efficace, faisant des modèles Pro et Edu des partenaires fiables pour vos projets. À partir de la version Edu, le Go2 est programmable et offre des possibilités infinies pour le développement et la recherche de vos propres applications robotiques. Le Go2 est également capable de gérer une hauteur de marche allant jusqu'à 14 cm. Cela en fait un outil idéal pour la recherche, l'éducation et l'initiation au monde de la robotique. Le Go2 Edu est livré avec une télécommande pour un contrôle simple et intuitif. Il dispose également d'une station d'accueil d'une puissance de calcul impressionnante de 100 TOPS, équipée de puissants algorithmes d'IA et d'une assistance technique. Le Go2 Edu est équipé d'une puissante batterie de 15000 mAh qui lui confère une autonomie impressionnante allant jusqu'à 4 heures. Cette longue durée de fonctionnement permet au robot d'effectuer des missions d'exploration plus longues et d'accomplir des tâches exigeantes. Comparaison des modèles Air Pro Edu/Edu Plus Dimensions (debout) 70 x 31 x 40 cm 70 x 31 x 40 cm 70 x 31 x 40 cm Dimensions (accroupi) 76 x 31 x 20 cm 76 x 31 x 20 cm 76 x 31 x 20 cm Matériau Alliage d'aluminium + Plastique technique haute résistance Alliage d'aluminium + Plastique technique haute résistance Alliage d'aluminium + Plastique technique haute résistance plastique Poids (avec batterie) environ 15 kg environ 15 kg environ 15 kg Tension 28~33,6 V 28~33,6 V 28~33,6 V Puissance de pointe environ 3000 W environ 3000 W Charge utile ≈7 kg (MAX ~ 10 kg) ≈8 kg (MAX ~ 10 kg) ≈8 kg (MAX ~ 12 kg) Vitesse 0~2,5 m/s 0~3,5 m/s 0~3,7 m/s (MAX ~ 5 m/s) Hauteur de montée/chute max. environ 15 cm environ 16 cm environ 16 cm Angle de montée max. 30° 40° 40° Puissance de calcul de base N/A 8 cœurs hautes performances Processeur Processeur 8 cœurs hautes performances Moteur d'articulation du genou en aluminium Ensemble de 12 Ensemble de 12 Ensemble de 12 Circuit intra-articulaire (genou) ✓ ✓ ✓ Refroidisseur de caloduc articulaire ✓ ✓ ✓ Amplitude de mouvement Corps : −48~48° Corps : −48~48° Corps : −48~48° Cuisse : −200°~90° Cuisse : −200°~90° Cuisse : −200°~90° Jarret : −156°~−48° Jarret : −156°~−48° Couple max. N/A Environ 45 N.m Environ 45 N.m LiDAR 3D super grand-angle ✓ ✓ ✓ Module de suivi de positionnement vectoriel sans fil N/A ✓ ✓ Grand angle HD Caméra ✓ ✓ ✓ Capteur de force côté pied N/A N/A ✓ Action de base ✓ ✓ ✓ Sangle de mise à l'échelle automatique N/A ✓ N/A OTA intelligent amélioré ✓ ✓ ✓ Transmission d'images RTT 2.0 ✓ ✓ ✓ Télécommande de base via l'application ✓ ✓ ✓ Visualisation des données via l'application ✓ ✓ ✓ Programme graphique via l'application ✓ ✓ ✓ Lampe frontale (3) W) ✓ ✓ ✓ Wi-Fi 6 double bande ✓ ✓ ✓ Bluetooth 5.2/4.2/2.1 ✓ ✓ ✓ Module 4G N/A CN/GB CN/GB Voix Fonction N/A ✓ ✓ Lecture musicale N/A ✓ ✓ Système intelligent de suivi latéral ISS 2.0 N/A ✓ ✓ Détection et évitement intelligents ✓ ✓ ✓ Secondaire Développement N/A N/A ✓ Contrôleur manuel En option En option ✓ Module haute puissance de calcul N/A N/A Edu : 40 TOPS de puissance de calcul Edu Plus : 100 TOPS de puissance de calcul NVIDIA Jetson Orin (en option) Smart Batterie Standard (8000 mAh) Standard (8000 mAh) Longue autonomie (15000 mAh) Autonomie 1 à 2 h 1 à 2 h 2 à 4 h Chargeur Standard (33,6 V, 3,5 A) Standard (33,6 V, 3,5 A) Charge rapide (33,6 V, 9 A) Inclus 1x Unitree Go2 Pro 1x Unitree Go2 batterie (8000 mAh) Téléchargements Documentation iOS/Android apps GitHub
€ 3.599,00
Meilleur prix
-

UFactory UFactory uArm Swift Pro
Le uArm Swift Pro est un bras robotique de haute qualité qui peut être utilisé dans un large éventail d'applications. Le uArm Swift Pro a été développé et optimisé pour une utilisation dans l'enseignement, ce qui signifie que de nombreux packages sont déjà disponibles pour les plateformes open source telles que ROS. Le uArm Swift Pro a une répétabilité de position de 0,2 mm et est également équipé d'un moteur pas à pas et d'un encodeur 12 bits. Ce ne sont là que quelques-unes des raisons qui font du uArm Swift Pro un excellent choix pour une utilisation pédagogique. Le kit d'impression 3D, qui permet de convertir le uArm Swift Pro en imprimante 3D en moins d'une minute, est une autre caractéristique intéressante. L'uArm peut être utilisé avec les plateformes/systèmes de développement suivants : SDK UFACTORY Arduino Python ROS GRABCAD OpenMV Application pour smartphone L'application pour smartphone iOS est déjà disponible dans l’App Store et permet de contrôler et de surveiller facilement le bras robotique. L'application pour Android est en cours de développement et sera bientôt disponible. Un exemple de vision industrielle Le GIF suivant montre l'uArm en combinaison avec l'OpenMV Machine Vision Cam M7 et les applications de reconnaissance faciale qui peuvent être mises en œuvre en MicroPython. Spécifications Degrés de liberté : 4 Répétabilité : Jusqu'à 0,2 mm Charge utile : 500 g Plage de travail : 50-320 mm Vitesse de positionnement : 100 m/s Retour de position : codeur 12 bits Dimensions : 150 x 140 x 281 mm 150 x 140 x 281 mm Poids : 2,2 kg Inclus UFactory uArm Swift Pro Body Bluetooth & Pince à vide Téléchargements Fiche technique
€ 939,00
Meilleur prix
-

Unitree Batterie de rechange Unitree Go2 (15000 mAh)
Avec une capacité de 15000 mAh, la batterie Unitree Go2 fournit une source d'alimentation robuste qui permet à votre robot d'effectuer des tâches en toute simplicité. Que ce soit pour des explorations complexes, des projets de recherche ou des excursions amusantes, cette puissante batterie fournit l'énergie dont votre robot a besoin. L'autonomie de la batterie Unitree Go2 varie en fonction de l'application et de l'utilisation. En fonction des fonctions et des activités utilisées, la batterie peut offrir entre 2 et 4e heures de fonctionnement. Cette flexibilité vous permet de personnaliser le robot selon vos besoins, permettant ainsi des missions d'exploration plus longues ou des projets plus étendus. La batterie Unitree Go2 est un compagnon fiable pour vos aventures robotiques. Avec sa capacité impressionnante et son autonomie adaptable, il garantit à votre robot des performances puissantes et endurantes, sans recharge fréquente. Que vous ayez besoin de la batterie Unitree Go2 en remplacement ou en mise à niveau de votre robot, cette puissante solution de stockage d'énergie offre l'équilibre parfait entre performances et fiabilité. Spécifications Tension nominale : 28,8 V CC Tension de charge limitée : 33,6 V CC Courant de charge : 9 A Capacité nominale : 15000 mAh, 432 Wh Norme : IS 16046 (partie 2) / CEI 62133-2 Système de gestion de batterie (BMS) auto-développé Dimensions : 120 x 80 x 182 mm Caractéristiques : Indicateur d'alimentation Protection contre l'autodécharge du stockage de la batterie Protection de charge d'équilibre Protection contre les surcharges Protection contre les décharges Protection contre les courts-circuits Protection contre la détection de charge de la batterie
€ 795,00
Meilleur prix
-

Unitree Unitree Go2 Edu Plus Robot quadrupède
Retard temporaire dans la livraison des robots Unitree Comme de nombreux autres fournisseurs, nous rencontrons actuellement des retards dans la livraison des robots Unitree. Un envoi de notre fournisseur est actuellement bloqué en douane, ce qui entraîne un retard dans la livraison des commandes déjà passées. Nous travaillons activement avec notre fournisseur pour résoudre ce problème et espérons obtenir plus de clarté bientôt, mais nous ne pouvons malheureusement pas garantir de délais précis pour le moment. Un nouvel envoi est également en cours d'acheminement, mais il faudra un certain temps avant qu'il n'arrive. Comme d'autres fournisseurs rencontrent les mêmes difficultés, changer de prestataire ne permettrait pas d’obtenir une solution plus rapide. Notre priorité est d’honorer les commandes existantes. Si vous avez des questions ou souhaitez modifier votre commande, n’hésitez pas à contacter notre service client. Nous vous tiendrons informés des prochains développements. La série Unitree Go2 se compose de robots quadrupèdes destinés à la recherche et au développement de systèmes autonomes dans les domaines de l'interaction homme-robot (HRI), du SLAM et du transport. Grâce à ses quatre pattes et à ses 12 degrés de liberté, ce robot peut évoluer sur des terrains variés. Le Go2 est équipé d'un système perfectionné de gestion de l'entraînement et de la puissance, qui permet une vitesse (selon la version) allant jusqu'à 3,7 m/s ou 11,88 km/h, avec une autonomie pouvant atteindre 4 heures. De plus, les moteurs ont un couple de 45 N.m au niveau du corps/des cuisses et des genoux, ce qui permet également des sauts ou des saltos arrière. Caractéristiques Système de reconnaissance ultra-performant : LIDAR 4D L1 Vitesse de course maximale : environ 5 m/s Couple d'articulation maximal : environ 45 N.m Module sans fil : Wi-Fi 6/Bluetooth/4G Autonomie ultra-longue : environ 2 à 4 h (longue durée de vie mesurée en conditions réelles) Système de suivi latéral intelligent : ISS 2.0 Spécifications Module de suivi : Suivi automatique ou télécommandé Caméra frontale : Résolution de transmission d'image : 1280 x 720, champ de vision : 120°, objectif ultra grand angle pour une clarté exceptionnelle. Feu avant : Éclaire intensément la route. LiDAR 4D L1 : Balayage omnidirectionnel ultra grand angle 360° x 90° permettant un évitement automatique avec un angle mort réduit et un fonctionnement stable. 12 moteurs d'articulation : Robuste et puissant, élégant et simple, une expérience visuelle inédite. Microphone interphone : Communication efficace sans restriction de scénario. Sangle auto-rétractable : Facile à transporter et à charger. Plus stable, plus puissant grâce à des appareils avancés. LiDAR 3D, carte ESIM 4G, Wi-Fi 6 bi-bande, Bluetooth 5.2 pour une connexion stable et un contrôle à distance. Puissant cœur de calcul : contrôleur de mouvement, processeur ARM hautes performances, processeur à algorithme d'intelligence artificielle amélioré, ORIN NX/NANO externe. Batterie intelligente : batterie standard de 8000 mAh, batterie longue durée de 15000 mAh, protection contre les surchauffes, les surcharges et les courts-circuits. Haut-parleur pour écouter de la musique : écoutez votre musique comme bon vous semble. Variantes de l'Unitree Go2 Le Go2 impressionne non seulement par ses capacités techniques, mais aussi par son design moderne et fin qui lui confère un look futuriste et attire tous les regards. Le Go2 Air est spécialement conçu pour les démonstrations et les présentations. Grâce à ses fonctionnalités de base, il offre une base solide pour démontrer les capacités de mouvement et les fonctionnalités d'un robot à quatre pattes. Important : Le Go2 Air est livré sans contrôleur. Celui-ci est disponible en option. Équipés d'un puissant processeur 8 cœurs hautes performances, les modèles Pro et Edu offrent une puissance de calcul impressionnante, indispensable aux tâches complexes et aux calculs exigeants. Cela permet un traitement des données plus rapide et plus efficace, faisant des modèles Pro et Edu des partenaires fiables pour vos projets. À partir de la version Edu, le Go2 est programmable et offre des possibilités infinies pour le développement et la recherche de vos propres applications robotiques. Le Go2 est également capable de gérer une hauteur de marche allant jusqu'à 14 cm. Cela en fait un outil idéal pour la recherche, l'éducation et l'initiation au monde de la robotique. Le Go2 Edu est livré avec une télécommande pour un contrôle simple et intuitif. Il dispose également d'une station d'accueil d'une puissance de calcul impressionnante de 100 TOPS, équipée de puissants algorithmes d'IA et d'une assistance technique. Le Go2 Edu est équipé d'une puissante batterie de 15000 mAh qui lui confère une autonomie impressionnante allant jusqu'à 4 heures. Cette longue durée de fonctionnement permet au robot d'effectuer des missions d'exploration plus longues et d'accomplir des tâches exigeantes. Comparaison des modèles Air Pro Edu/Edu Plus Dimensions (debout) 70 x 31 x 40 cm 70 x 31 x 40 cm 70 x 31 x 40 cm Dimensions (accroupi) 76 x 31 x 20 cm 76 x 31 x 20 cm 76 x 31 x 20 cm Matériau Alliage d'aluminium + Plastique technique haute résistance Alliage d'aluminium + Plastique technique haute résistance Alliage d'aluminium + Plastique technique haute résistance plastique Poids (avec batterie) environ 15 kg environ 15 kg environ 15 kg Tension 28~33,6 V 28~33,6 V 28~33,6 V Puissance de pointe environ 3000 W environ 3000 W Charge utile ≈7 kg (MAX ~ 10 kg) ≈8 kg (MAX ~ 10 kg) ≈8 kg (MAX ~ 12 kg) Vitesse 0~2,5 m/s 0~3,5 m/s 0~3,7 m/s (MAX ~ 5 m/s) Hauteur de montée/chute max. environ 15 cm environ 16 cm environ 16 cm Angle de montée max. 30° 40° 40° Puissance de calcul de base N/A 8 cœurs hautes performances Processeur Processeur 8 cœurs hautes performances Moteur d'articulation du genou en aluminium Ensemble de 12 Ensemble de 12 Ensemble de 12 Circuit intra-articulaire (genou) ✓ ✓ ✓ Refroidisseur de caloduc articulaire ✓ ✓ ✓ Amplitude de mouvement Corps : −48~48° Corps : −48~48° Corps : −48~48° Cuisse : −200°~90° Cuisse : −200°~90° Cuisse : −200°~90° Jarret : −156°~−48° Jarret : −156°~−48° Couple max. N/A Environ 45 N.m Environ 45 N.m LiDAR 3D super grand-angle ✓ ✓ ✓ Module de suivi de positionnement vectoriel sans fil N/A ✓ ✓ Grand angle HD Caméra ✓ ✓ ✓ Capteur de force côté pied N/A N/A ✓ Action de base ✓ ✓ ✓ Sangle de mise à l'échelle automatique N/A ✓ N/A OTA intelligent amélioré ✓ ✓ ✓ Transmission d'images RTT 2.0 ✓ ✓ ✓ Télécommande de base via l'application ✓ ✓ ✓ Visualisation des données via l'application ✓ ✓ ✓ Programme graphique via l'application ✓ ✓ ✓ Lampe frontale (3) W) ✓ ✓ ✓ Wi-Fi 6 double bande ✓ ✓ ✓ Bluetooth 5.2/4.2/2.1 ✓ ✓ ✓ Module 4G N/A CN/GB CN/GB Voix Fonction N/A ✓ ✓ Lecture musicale N/A ✓ ✓ Système intelligent de suivi latéral ISS 2.0 N/A ✓ ✓ Détection et évitement intelligents ✓ ✓ ✓ Secondaire Développement N/A N/A ✓ Contrôleur manuel En option En option ✓ Module haute puissance de calcul N/A N/A Edu : 40 TOPS de puissance de calcul Edu Plus : 100 TOPS de puissance de calcul NVIDIA Jetson Orin (en option) Smart Batterie Standard (8000 mAh) Standard (8000 mAh) Longue autonomie (15000 mAh) Autonomie 1 à 2 h 1 à 2 h 2 à 4 h Chargeur Standard (33,6 V, 3,5 A) Standard (33,6 V, 3,5 A) Charge rapide (33,6 V, 9 A) Inclus 1x Unitree Go2 Edu Plus 1x Unitree Go2 télécommande 1x Unitree Go2 batterie (15000 mAh) 1x Unitree station d'accueil avec une puissance de calcul de 100 TOPS Téléchargements Documentation iOS/Android apps GitHub
€ 14.999,00
Meilleur prix
-

Unitree Unitree Go2 D1 Bras robotique servo
Le bras robotisé servo Unitree Go2 D1 est un bras robotisé hautes performances à 6 degrés de liberté, spécialement conçu pour une intégration parfaite avec le robot quadrupède Unitree Go2. Conçu pour allier flexibilité et précision, c'est l'outil idéal pour l'éducation, la recherche, l'automatisation et le développement robotique avancé. Doté de six articulations entièrement articulées et d'une pince intégrée, le D1 offre un véritable mouvement sur six axes et une liberté de mouvement exceptionnelle. Grâce à la prise en charge du contrôle de la position, de la vitesse et de la force, il permet un fonctionnement précis pour un large éventail de tâches, du déploiement en conditions réelles aux environnements d'apprentissage expérimentaux. Fabriqué en alliage d'aluminium léger, le bras ne pèse que 2,37 kg pour une portée de 670 mm. Cet équilibre entre robustesse et agilité le rend parfaitement adapté aux applications mobiles, sans compromettre la stabilité ni la portée. Grâce à son architecture d'interface à deux niveaux, le D1 prend en charge les commandes motrices de bas niveau et la programmation comportementale de haut niveau, offrant aux développeurs, enseignants et chercheurs un contrôle total, qu'il s'agisse d'affiner des séquences de mouvements ou de créer des workflows robotiques complexes. Compatible avec des composants externes tels que des caméras ou des châssis de robots mobiles, l'Unitree D1 ouvre la voie à une variété de cas d'utilisation étendus. Qu'il s'agisse de manipulation autonome d'objets, de formation à l'IA ou d'enseignement pratique de la robotique, le D1 transforme n'importe quel environnement en une plateforme d'innovation dynamique et interactive. Spécifications DoF 6 axes + 1 pince Charge utile 500 g Portée du bras 550 mm (pince non incluse)670 mm (pince incluse) Interfaces DC5.5-2.1 (alimentation)RJ45 (communication)USB-C (débogage du port série) Type de moteur Servo bus Puissance 60 W Poids 2,37 kg Amplitude de rotation articulaire J1: ±135°J2: ±90°J3: ±90°J4: ±135°J5: ±90°J6: ±135°
€ 4.599,00
Meilleur prix
-

Unitree Unitree Go2 Edu Plus 3D LiDAR Robot quadrupède
Retard temporaire dans la livraison des robots Unitree Comme de nombreux autres fournisseurs, nous rencontrons actuellement des retards dans la livraison des robots Unitree. Un envoi de notre fournisseur est actuellement bloqué en douane, ce qui entraîne un retard dans la livraison des commandes déjà passées. Nous travaillons activement avec notre fournisseur pour résoudre ce problème et espérons obtenir plus de clarté bientôt, mais nous ne pouvons malheureusement pas garantir de délais précis pour le moment. Un nouvel envoi est également en cours d'acheminement, mais il faudra un certain temps avant qu'il n'arrive. Comme d'autres fournisseurs rencontrent les mêmes difficultés, changer de prestataire ne permettrait pas d’obtenir une solution plus rapide. Notre priorité est d’honorer les commandes existantes. Si vous avez des questions ou souhaitez modifier votre commande, n’hésitez pas à contacter notre service client. Nous vous tiendrons informés des prochains développements. La série Unitree Go2 se compose de robots quadrupèdes destinés à la recherche et au développement de systèmes autonomes dans les domaines de l'interaction homme-robot (HRI), du SLAM et du transport. Grâce à ses quatre pattes et à ses 12 degrés de liberté, ce robot peut évoluer sur des terrains variés. Le Go2 est équipé d'un système perfectionné de gestion de l'entraînement et de la puissance, qui permet une vitesse (selon la version) allant jusqu'à 3,7 m/s ou 11,88 km/h, avec une autonomie pouvant atteindre 4 heures. De plus, les moteurs ont un couple de 45 N.m au niveau du corps/des cuisses et des genoux, ce qui permet également des sauts ou des saltos arrière. Caractéristiques Système de reconnaissance ultra-performant : LIDAR 4D L1 Vitesse de course maximale : environ 5 m/s Couple d'articulation maximal : environ 45 N.m Module sans fil : Wi-Fi 6/Bluetooth/4G Autonomie ultra-longue : environ 2 à 4 h (longue durée de vie mesurée en conditions réelles) Système de suivi latéral intelligent : ISS 2.0 Spécifications Module de suivi : Suivi automatique ou télécommandé Caméra frontale : Résolution de transmission d'image : 1280 x 720, champ de vision : 120°, objectif ultra grand angle pour une clarté exceptionnelle. Feu avant : Éclaire intensément la route. LiDAR 4D L1 : Balayage omnidirectionnel ultra grand angle 360° x 90° permettant un évitement automatique avec un angle mort réduit et un fonctionnement stable. 12 moteurs d'articulation : Robuste et puissant, élégant et simple, une expérience visuelle inédite. Microphone interphone : Communication efficace sans restriction de scénario. Sangle auto-rétractable : Facile à transporter et à charger. Plus stable, plus puissant grâce à des appareils avancés. LiDAR 3D, carte ESIM 4G, Wi-Fi 6 bi-bande, Bluetooth 5.2 pour une connexion stable et un contrôle à distance. Puissant cœur de calcul : contrôleur de mouvement, processeur ARM hautes performances, processeur à algorithme d'intelligence artificielle amélioré, ORIN NX/NANO externe. Batterie intelligente : batterie standard de 8000 mAh, batterie longue durée de 15000 mAh, protection contre les surchauffes, les surcharges et les courts-circuits. Haut-parleur pour écouter de la musique : écoutez votre musique comme bon vous semble. Variantes de l'Unitree Go2 Le Go2 impressionne non seulement par ses capacités techniques, mais aussi par son design moderne et fin qui lui confère un look futuriste et attire tous les regards. Le Go2 Air est spécialement conçu pour les démonstrations et les présentations. Grâce à ses fonctionnalités de base, il offre une base solide pour démontrer les capacités de mouvement et les fonctionnalités d'un robot à quatre pattes. Important : Le Go2 Air est livré sans contrôleur. Celui-ci est disponible en option. Équipés d'un puissant processeur 8 cœurs hautes performances, les modèles Pro et Edu offrent une puissance de calcul impressionnante, indispensable aux tâches complexes et aux calculs exigeants. Cela permet un traitement des données plus rapide et plus efficace, faisant des modèles Pro et Edu des partenaires fiables pour vos projets. À partir de la version Edu, le Go2 est programmable et offre des possibilités infinies pour le développement et la recherche de vos propres applications robotiques. Le Go2 est également capable de gérer une hauteur de marche allant jusqu'à 14 cm. Cela en fait un outil idéal pour la recherche, l'éducation et l'initiation au monde de la robotique. Le Go2 Edu est livré avec une télécommande pour un contrôle simple et intuitif. Il dispose également d'une station d'accueil d'une puissance de calcul impressionnante de 100 TOPS, équipée de puissants algorithmes d'IA et d'une assistance technique. Le Go2 Edu est équipé d'une puissante batterie de 15000 mAh qui lui confère une autonomie impressionnante allant jusqu'à 4 heures. Cette longue durée de fonctionnement permet au robot d'effectuer des missions d'exploration plus longues et d'accomplir des tâches exigeantes. Le Go2 Edu Plus 3D LiDAR est équipé d'un puissant capteur LiDAR 3D Hesai XT16. Ce capteur LiDAR offre au robot une perception tridimensionnelle précise de son environnement, permettant une navigation fluide et une évitement intelligent des obstacles. Comparaison des modèles Air Pro Edu/Edu Plus Dimensions (debout) 70 x 31 x 40 cm 70 x 31 x 40 cm 70 x 31 x 40 cm Dimensions (accroupi) 76 x 31 x 20 cm 76 x 31 x 20 cm 76 x 31 x 20 cm Matériau Alliage d'aluminium + Plastique technique haute résistance Alliage d'aluminium + Plastique technique haute résistance Alliage d'aluminium + Plastique technique haute résistance plastique Poids (avec batterie) environ 15 kg environ 15 kg environ 15 kg Tension 28~33,6 V 28~33,6 V 28~33,6 V Puissance de pointe environ 3000 W environ 3000 W Charge utile ≈7 kg (MAX ~ 10 kg) ≈8 kg (MAX ~ 10 kg) ≈8 kg (MAX ~ 12 kg) Vitesse 0~2,5 m/s 0~3,5 m/s 0~3,7 m/s (MAX ~ 5 m/s) Hauteur de montée/chute max. environ 15 cm environ 16 cm environ 16 cm Angle de montée max. 30° 40° 40° Puissance de calcul de base N/A 8 cœurs hautes performances Processeur Processeur 8 cœurs hautes performances Moteur d'articulation du genou en aluminium Ensemble de 12 Ensemble de 12 Ensemble de 12 Circuit intra-articulaire (genou) ✓ ✓ ✓ Refroidisseur de caloduc articulaire ✓ ✓ ✓ Amplitude de mouvement Corps : −48~48° Corps : −48~48° Corps : −48~48° Cuisse : −200°~90° Cuisse : −200°~90° Cuisse : −200°~90° Jarret : −156°~−48° Jarret : −156°~−48° Couple max. N/A Environ 45 N.m Environ 45 N.m LiDAR 3D super grand-angle ✓ ✓ ✓ Module de suivi de positionnement vectoriel sans fil N/A ✓ ✓ Grand angle HD Caméra ✓ ✓ ✓ Capteur de force côté pied N/A N/A ✓ Action de base ✓ ✓ ✓ Sangle de mise à l'échelle automatique N/A ✓ N/A OTA intelligent amélioré ✓ ✓ ✓ Transmission d'images RTT 2.0 ✓ ✓ ✓ Télécommande de base via l'application ✓ ✓ ✓ Visualisation des données via l'application ✓ ✓ ✓ Programme graphique via l'application ✓ ✓ ✓ Lampe frontale (3) W) ✓ ✓ ✓ Wi-Fi 6 double bande ✓ ✓ ✓ Bluetooth 5.2/4.2/2.1 ✓ ✓ ✓ Module 4G N/A CN/GB CN/GB Voix Fonction N/A ✓ ✓ Lecture musicale N/A ✓ ✓ Système intelligent de suivi latéral ISS 2.0 N/A ✓ ✓ Détection et évitement intelligents ✓ ✓ ✓ Secondaire Développement N/A N/A ✓ Contrôleur manuel En option En option ✓ Module haute puissance de calcul N/A N/A Edu : 40 TOPS de puissance de calcul Edu Plus : 100 TOPS de puissance de calcul NVIDIA Jetson Orin (en option) Smart Batterie Standard (8000 mAh) Standard (8000 mAh) Longue autonomie (15000 mAh) Autonomie 1 à 2 h 1 à 2 h 2 à 4 h Chargeur Standard (33,6 V, 3,5 A) Standard (33,6 V, 3,5 A) Charge rapide (33,6 V, 9 A) Inclus 1x Unitree Go2 Edu Plus 3D LiDAR 1xHesai XT16 3D LiDAR 1x Unitree Go2 télécommande 1x Unitree Go2 batterie (15000 mAh) 1x Unitree station d'accueil avec une puissance de calcul de 100 TOPS Téléchargements Documentation iOS/Android apps GitHub
€ 20.599,00
Meilleur prix
-

Unitree Unitree Go2 Remote Controller
Le contrôleur Unitree Go2 est une télécommande dédiée conçue pour un fonctionnement fluide et précis du robot quadrupède Unitree Go2. Cette télécommande bimanuelle intègre des modules de transmission de données et Bluetooth, facilitant une communication sans fil fiable avec le robot. Elle offre une portée de contrôle ultra-longue de plus de 100 mètres en environnement ouvert, garantissant une grande flexibilité dans divers scénarios opérationnels. Spécifications Tension de charge 5 V Courant de charge 2 A Fréquence 2,4 GHz Modes de communication Module de transmission de données et Bluetooth Capacité de la batterie 2500 mAh Autonomie Environ 4,5 heures Distance de contrôle Plus de 100 mètres en milieu ouvert
€ 299,00
Meilleur prix
-

Unitree Unitree G1 Robot Humanoïde
L'Unitree G1 est un robot humanoïde moderne qui impressionne par sa flexibilité remarquable et sa technologie avancée. Avec une gamme exceptionnellement large de mouvements articulaires et jusqu'à 43 moteurs d'articulation, il dépasse l'agilité d'un humain typique. Grâce à l'apprentissage par imitation et à l'apprentissage par renforcement, ses systèmes robotiques sont continuellement développés et optimisés par l'intelligence artificielle. L'une des caractéristiques les plus impressionnantes du G1 est sa capacité à se mettre en position de marche de manière autonome dès qu'il touche le sol – aucune aide extérieure n'est nécessaire ! Il peut immédiatement commencer à se déplacer, ce qui démontre un haut niveau d'indépendance et d'adaptabilité. Le G1 est également équipé d'une main à contrôle de force, très dextre, qui fonctionne avec sensibilité et précision, grâce à sa combinaison de contrôle de force et de position. Cette main reproduit fidèlement les mouvements humains, ce qui permet de manipuler des objets avec précision. Caractéristiques Intel RealSense D435 caméra de profondeur Livox MID-360 3D LiDAR Matrice de microphones (annulation du bruit et de l'écho) Haut-parleur stéréo 5 W Batterie extra large à dégagement rapide Degrés de liberté d'un seul bras (épaule 2 + coude 2) Câblage interne des articulations de l'ensemble de la machine (pas de câbles externes) Couple maximal au niveau des articulations 120 N.m Degrés de liberté sur une jambe (hanche 3, genou 1, cheville 2) Vitesse de déplacement de 2 m/s Spécifications Hauteur, largeur et épaisseur (debout) 1320 x 450 x 200 mm Hauteur, largeur et épaisseur (plié) 690 x 450 x 300 mm Poids (avec batterie) env. 35 kg Degrés totaux de liberté (liberté conjointe 23 Degrés de liberté sur une seule jambe 6 Degrés de liberté à la taille 1 Degrés de liberté à un seul bras 5 Roulement de sortie commun Roulements à rouleaux croisés de qualité industrielle (haute précision, capacité de charge élevée) Moteur articulé PMSM (moteur synchrone à aimant permanent) à rotor interne haute vitesse à faible inertie – meilleure vitesse de réponse et dissipation thermique) Couple maximal de l'articulation du genou 90 N.m Charge maximale du bras env. 2 kg Longueur mollet + cuisse 0,6 m Envergure des bras env. 0,45 m Espace de mouvement articulaire extra large • Articulation de la taille : Z ±155°• Articulation du genou : 0~165°• Articulation de la hanche : P ±154°, R -30~+170°, Y ±158° Routage électrique creux à joint complet Oui Encodeur commun Double encodeur Système de refroidissement Refroidissement local par air Alimentation Batterie au lithium 13 cordes Puissance de calcul de base CPU hautes performances à 8 cœurs Capteur de détection Caméra de profondeur + LiDAR 3D Microphones Matrice de 4 microphones Haut-parleur Haut-parleur stéréo 5 W Sans fil WiFi 6, Bluetooth 5.2 Batterie intelligente (libération rapide) 9000 mAh Chargeur 54 V/5 A Contrôleur manuel Oui Autonomie de la batterie env. 2 heures OTA intelligent amélioré Oui
€ 24.999,00
Meilleur prix
-

UFactory Bras robotique UFactory 850
UFactory 850 est le robot le plus puissant offrant des performances de qualité industrielle. Caractéristiques 6DoF Charge utile : 5 kg Portée : 850 mm Répétabilité : 0,02 mm Poids : 20 kg Applications Glambot Soudage Vissage Vision robotique Production industrielle Conçu pour les plates-formes mobiles et votre établi Le boîtier de commande AC contient un adaptateur AC-DC à l'intérieur, 100-240 V AC est prêt à fonctionner. Le boîtier de commande DC prend en charge des entrées larges de 48 à 72 V, il s'adapte parfaitement au système de batterie de votre plate-forme mobile. Déploiement flexible avec fonctionnalité sécurisée Enseignement manuel, peu encombrant et facile à redéployer vers plusieurs applications sans modifier votre organisation de production. Parfaitement pour les tâches récurrentes. La détection des collisions est disponible pour tous nos cobots. Votre sécurité est toujours la priorité absolue. Interface graphique pour une programmation adaptée aux débutants Compatible avec divers systèmes d'exploitation, notamment macOS et Windows. Technologie Web compatible avec tous les principaux navigateurs. Glissez et déposez pour créer votre code en quelques minutes. SDK puissant et open source à portée de main Le SDK Python/C++ open source entièrement fonctionnel offre une programmation plus flexible. Les packages ROS/ROS2 sont prêts à l'emploi. Des exemples de codes vous aident à déployer le bras robotique en douceur. Caractéristiques UFactory 850 xArm 5 xArm 6 xArm 7 Charge utile 5kg 3kg 5kg 3,5 kg Atteindre 850 mm 700mm 700mm 700mm Degrés de liberté 6 5 6 7 Répétabilité ±0,02 mm ±0,1mm ±0,1mm ±0,1mm Vitesse maximum 1 m/s 1 m/s 1 m/s 1 m/s Poids (bras du robot uniquement) 20 kg 11,2 kg 12,2 kg 13,7 kg Vitesse maximum 180°/s 180°/s 180°/s 180°/s Articulation 1 ±360° ±360° ±360° ±360° Articulation 2 -132°~132° -118°~120° -118°~120° -118°~120° Articulation 3 -242°~3,5° -225°~11° -225°~11° ±360° Articulation 4 ±360° -97°~180° ±360° -11°~225° Articulation 5 -124°~124° ±360° -97°~180° ±360° Articulation 6 ±360° ±360° -97°~180° Articulation 7 ±360° Matériel Plage de température ambiante 0-50°C Consommation d'énergie Typique 240 W, maximum 1 000 W Alimentation d'entrée 48 V CC, 20,8 A Empreinte Ø190mm Matériaux Aluminium, fibre de carbone Type de connecteur de base M8x4 Salle blanche de classe ISO 5 Montage de robots N'importe lequel Protocole de communication de l'effecteur final Modbus RTU E/S de l'effecteur final 2x DI / 2x DO / 2x AI / 1x RS485 Mode de communication Ethernet Inclus 1x bras robotique UFactory 850 1x boîtier de commande AC 1x câble d'alimentation du boîtier de commande
€ 11.779,00
Meilleur prix
-

UFactory UFactory xArm 7
Ce robot multi-axes équilibre parfaitement puissance et taille. Caractéristiques 6 axes Charge utile : 3,5 kg Portée : 700 mm Répétabilité : 0,1 mm Vitesse maximale 1000 mm/s Applications Entretien des machines Cueillette des bacs Plateforme mobile Automatisation du laboratoire Recherche robotique Des robots collaboratifs durables pour votre automatisation L'entraînement harmonique et les servomoteurs de qualité industrielle garantissent un fonctionnement 24h/24 et 7j/7 sans arrêt. Fabriqué en fibre de carbone, son poids de 15 kg permet un déploiement plus facile. Déploiement flexible avec fonctionnalité sécurisée Enseignement manuel, léger, peu encombrant et facile à redéployer vers plusieurs applications sans modifier votre organisation de production. Parfaitement pour les tâches récurrentes. La détection des collisions est disponible pour tous nos cobots. Votre sécurité est toujours la priorité absolue. Interface graphique pour une programmation conviviale pour les débutants Compatible avec divers systèmes d'exploitation, notamment macOS et Windows. Technologie Web compatible avec tous les principaux navigateurs. Glissez et déposez pour créer votre code en quelques minutes. Un SDK puissant et open source à portée de main Le SDK Python/C++ open source entièrement fonctionnel offre une programmation plus flexible. Les packages ROS/ROS2 sont prêts à l'emploi. Des exemples de codes vous aident à déployer le bras robotique en douceur. Caractéristiques UFactory 850 xArm 5 xArm 6 xArm 7 Charge utile 5 kg 3 kg 5 kg 3,5 kg Atteindre 850 mm 700mm 700mm 700mm Degrés de liberté 6 5 6 7 Répétabilité ±0,02 mm ±0,1mm ±0,1mm ±0,1mm Vitesse maximum 1 m/s 1 m/s 1 m/s 1 m/s Poids (bras du robot uniquement) 20 kg 11,2 kg 12,2 kg 13,7 kg Vitesse maximum 180°/s 180°/s 180°/s 180°/s Articulation 1 ±360° ±360° ±360° ±360° Articulation 2 -132°~132° -118°~120° -118°~120° -118°~120° Articulation 3 -242°~3,5° -225°~11° -225°~11° ±360° Articulation 4 ±360° -97°~180° ±360° -11°~225° Articulation 5 -124°~124° ±360° -97°~180° ±360° Articulation 6 ±360° ±360° -97°~180° Articulation 7 ±360° Matériel Plage de température ambiante 0-50°C Consommation d'énergie Min 8,4 W, typique 200 W, max 400 W Alimentation d'entrée 24 V CC, 16,5 A Empreinte Ø 126 mm Matériaux Aluminium, fibre de carbone Type de connecteur de base M5x5 Salle blanche de classe ISO 5 Montage de robots N'importe lequel Protocole de communication de l'effecteur final Modbus RTU(rs485) E/S de l'effecteur final 2x DI/2x DO/2x AI/1x RS485 Mode de communication Ethernet Inclus 1x bras robotique xArm 5 1x boîtier de commande AC 1x câble d'alimentation du bras robotique 1x câble adaptateur d'effecteur d'extrémité de bras robotique 1x câble de signal pour bras robotique 1x câble d'alimentation du boîtier de commande 1x câble réseau 1x outil de montage 1x Guide de démarrage rapide
€ 14.569,00
Meilleur prix
-

UFactory UFactory xArm 6
Ce robot multi-axes équilibre parfaitement puissance et taille. Caractéristiques Charge utile : 5 kg Portée : 700 mm Répétabilité : 0,1 mm Vitesse maximale 1000 mm/s Applications Entretien des machines Cueillette des bacs Plateforme mobile Automatisation du laboratoire Recherche robotique Des robots collaboratifs durables pour votre automatisation L'entraînement harmonique et les servomoteurs de qualité industrielle garantissent un fonctionnement 24h/24 et 7j/7 sans arrêt. Fabriqué en fibre de carbone, son poids de 15 kg permet un déploiement plus facile. Déploiement flexible avec fonctionnalité sécurisée Enseignement manuel, léger, peu encombrant et facile à redéployer vers plusieurs applications sans modifier votre organisation de production. Parfaitement pour les tâches récurrentes. La détection des collisions est disponible pour tous nos cobots. Votre sécurité est toujours la priorité absolue. Interface graphique pour une programmation conviviale pour les débutants Compatible avec divers systèmes d'exploitation, notamment macOS et Windows. Technologie Web compatible avec tous les principaux navigateurs. Glissez et déposez pour créer votre code en quelques minutes. Un SDK puissant et open source à portée de main Le SDK Python/C++ open source entièrement fonctionnel offre une programmation plus flexible. Les packages ROS/ROS2 sont prêts à l'emploi. Des exemples de codes vous aident à déployer le bras robotique en douceur. Caractéristiques UFactory 850 xArm 5 xArm 6 xArm 7 Charge utile 5kg 3kg 5kg 3,5 kg Atteindre 850 mm 700mm 700mm 700mm Degrés de liberté 6 5 6 7 Répétabilité ±0,02 mm ±0,1mm ±0,1mm ±0,1mm Vitesse maximum 1 m/s 1 m/s 1 m/s 1 m/s Poids (bras du robot uniquement) 20 kg 11,2 kg 12,2kg 13,7kg Vitesse maximum 180°/s 180°/s 180°/s 180°/s Articulation 1 ±360° ±360° ±360° ±360° Articulation 2 -132°~132° -118°~120° -118°~120° -118°~120° Articulation 3 -242°~3,5° -225°~11° -225°~11° ±360° Articulation 4 ±360° -97°~180° ±360° -11°~225° Articulation 5 -124°~124° ±360° -97°~180° ±360° Articulation 6 ±360° ±360° -97°~180° Articulation 7 ±360° Matériel xPauvre Spécifications du robot Plage de température ambiante 0-50°C Consommation d'énergie Min 8,4 W, typique 200 W, max 400 W Alimentation d'entrée 24 V CC, 16,5 A Empreinte Ø 126 mm Matériaux Aluminium, fibre de carbone Type de connecteur de base M5x5 Salle blanche de classe ISO 5 Montage de robots N'importe lequel Protocole de communication de l'effecteur final Modbus RTU(rs485) E/S de l'effecteur final 2x DI/2x DO/2x AI/1x RS485 Mode de communication Ethernet Inclus 1x bras robotique xArm 5 1x boîtier de commande AC 1x câble d'alimentation du bras robotique 1x câble adaptateur d'effecteur d'extrémité de bras robotique 1x câble de signal pour bras robotique 1x câble d'alimentation du boîtier de commande 1x câble réseau 1x outil de montage 1x Guide de démarrage rapide
€ 11.259,00
Meilleur prix
-

UFactory UFactory xArm 5 Lite
Ce robot multi-axes équilibre parfaitement puissance et taille. Caractéristiques 5 axes Charge utile : 3 kg Portée : 700 mm Répétabilité : 0,1 mm Vitesse maximale 1000 mm/s Applications Entretien des machines Cueillette des bacs Plateforme mobile Automatisation du laboratoire Recherche robotique Des robots collaboratifs durables pour votre automatisation L'entraînement harmonique et les servomoteurs de qualité industrielle garantissent un fonctionnement 24h/24 et 7j/7 sans arrêt. Fabriqué en fibre de carbone, son poids de 15 kg permet un déploiement plus facile. Déploiement flexible avec fonctionnalité sécurisée Enseignement manuel, léger, peu encombrant et facile à redéployer vers plusieurs applications sans modifier votre organisation de production. Parfaitement pour les tâches récurrentes. La détection des collisions est disponible pour tous nos cobots. Votre sécurité est toujours la priorité absolue. Interface graphique pour une programmation conviviale pour les débutants Compatible avec divers systèmes d'exploitation, notamment macOS et Windows. Technologie Web compatible avec tous les principaux navigateurs. Glissez et déposez pour créer votre code en quelques minutes. Un SDK puissant et open source à portée de main Le SDK Python/C++ open source entièrement fonctionnel offre une programmation plus flexible. Les packages ROS/ROS2 sont prêts à l'emploi. Des exemples de codes vous aident à déployer le bras robotique en douceur. Caractéristiques UFactory 850 xArm 5 xArm 6 xArm 7 Charge utile 5 kg 3 kg 5 kg 3,5 kg Atteindre 850mm 700mm 700mm 700mm Degrés de liberté 6 5 6 7 Répétabilité ±0,02 mm ±0,1mm ±0,1mm ±0,1mm Vitesse maximum 1 m/s 1 m/s 1 m/s 1 m/s Poids (bras du robot uniquement) 20 kg 11,2 kg 12,2kg 13,7 kg Vitesse maximum 180°/s 180°/s 180°/s 180°/s Articulation 1 ±360° ±360° ±360° ±360° Articulation 2 -132°~132° -118°~120° -118°~120° -118°~120° Articulation 3 -242°~3,5° -225°~11° -225°~11° ±360° Articulation 4 ±360° -97°~180° ±360° -11°~225° Articulation 5 -124°~124° ±360° -97°~180° ±360° Articulation 6 ±360° ±360° -97°~180° Articulation 7 ±360° Matériel Plage de température ambiante 0-50°C Consommation d'énergie Min 8,4 W, typique 200 W, max 400 W Alimentation d'entrée 24 V CC, 16,5 A Empreinte Ø 126 mm Matériaux Aluminium, fibre de carbone Type de connecteur de base M5x5 Salle blanche de classe ISO 5 Montage de robots N'importe lequel Protocole de communication de l'effecteur final Modbus RTU(rs485) E/S de l'effecteur final 2x DI/2x DO/2x AI/1x RS485 Mode de communication Ethernet Inclus 1x bras robotique xArm 5 1x boîtier de commande AC 1x câble d'alimentation du bras robotique 1x câble adaptateur d'effecteur d'extrémité de bras robotique 1x câble de signal pour bras robotique 1x câble d'alimentation du boîtier de commande 1x câble réseau 1x outil de montage 1x Guide de démarrage rapide
€ 7.285,00
Meilleur prix
-

Robotis Robotis TurtleBot3 Waffle Pi (Raspberry Pi 4 inclus)
La plateforme ROS la plus populaire au monde TurtleBot est le robot open source le plus populaire pour l'éducation et la recherche. La nouvelle génération de TurtleBot3 est un petit robot mobile, peu coûteux, entièrement programmable et basé sur ROS. Il est destiné à être utilisé pour l'éducation, la recherche, les loisirs et le prototypage de produits. Coût abordable TurtleBot a été développé pour répondre aux besoins économiques des écoles, des laboratoires et des entreprises. TurtleBot3 est le robot le plus abordable parmi les robots mobiles SLAM équipés d'un capteur de distance laser 360° LDS-01. Norme ROS La marque TurtleBot est gérée par Open Robotics, qui développe et maintient ROS. Aujourd'hui, ROS est devenu la plateforme de référence pour tous les roboticiens du monde. TurtleBot peut être intégré à des composants robotiques existants basés sur ROS, mais TurtleBot3 peut être une plateforme abordable pour ceux qui veulent commencer à apprendre ROS. Extensibilité TurtleBot3 encourage les utilisateurs à personnaliser sa structure mécanique à l'aide d'options alternatives : carte embarquée open source (en tant que carte de contrôle), ordinateur et capteurs. TurtleBot3 Waffle Pi est une plate-forme à deux roues à entraînement différentiel, mais sa structure et sa mécanique peuvent être personnalisées de nombreuses façons : voitures, vélos, remorques, etc. Développez vos idées au-delà de l'imagination avec différents SBC, capteurs et moteurs sur une structure évolutive. Actionneur modulaire pour robot mobile TurtleBot3 est capable d'obtenir des données spatiales précises en utilisant 2 DYNAMIXEL dans les articulations des roues. Les DYNAMIXEL de la série XM peuvent être utilisés selon l'un des 6 modes de fonctionnement (série XL : 4 modes de fonctionnement) : Mode de contrôle de la vitesse pour les roues, mode de contrôle du couple ou mode de contrôle de la position pour les articulations, etc. DYNAMIXEL peut même être utilisé pour fabriquer un manipulateur mobile qui est léger mais qui peut être contrôlé avec précision grâce au contrôle de la vitesse, du couple et de la position. DYNAMIXEL est un composant c?ur qui rend TurtleBot3 parfait. Il est facile à assembler, à entretenir, à remplacer et à reconfigurer. Carte de contrôle ouverte pour ROS La carte de contrôle est open-source au niveau du matériel et du logiciel pour la communication ROS. La carte de contrôle OpenCR1.0 est suffisamment puissante pour contrôler non seulement les capteurs DYNAMIXEL mais aussi les capteurs ROBOTIS qui sont fréquemment utilisés pour des tâches de reconnaissance de base de manière rentable. Différents capteurs tels que les capteurs tactiles, les capteurs infrarouges, les capteurs de couleur et bien d'autres sont disponibles. L'OpenCR1.0 possède un capteur IMU à l'intérieur de la carte afin d'améliorer la précision du contrôle pour d'innombrables applications. La carte dispose d'alimentations de 3,3 V, 5 V et 12 V pour renforcer les gammes d'appareils informatiques disponibles. Source ouverte Le matériel, le micrologiciel et le logiciel de TurtleBot3 sont des logiciels libres, ce qui signifie que les utilisateurs sont invités à télécharger, modifier et partager les codes sources. Tous les composants de TurtleBot3 sont fabriqués en plastique moulé par injection afin de réduire les coûts, mais les données de CAO 3D sont également disponibles pour l'impression 3D. Spécifications Vitesse de translation maximale 0.26 m/s Vitesse de rotation maximale 1.82 rad/s (104.27 deg/s) Charge utile maximale 30 kg Taille (L x L x H) 281 x 306 x 141 mm Poids (+ SBC + batterie + capteurs) 1.8 kg Seuil de montée Max 10 mm Durée d'utilisation prévue 2 h Temps de charge prévu 2 h 30 m SBC (ordinateur à carte unique) Raspberry Pi 4 (2 Go RAM) MCU 32-bit ARM Cortex-M7 with FPU (216 MHz, 462 DMIPS) Contrôleur à distance RC-100B + BT-410 Set (Bluetooth 4, BLE) Actionneur XL430-W210 LDS (capteur de distance laser) 360 Laser Distance Sensor LDS-01 or LDS-02 Caméra Raspberry Pi Camera Module v2.1 IMU Gyroscope 3 axesAccelerometer 3 axes Connecteurs d'alimentation 3.3 V/800 mA5 V/4 A12 V/1 A Connecteurs d'extension GPIO 18 brochesArduino 32 broches Périphériques 3x UART, 1x bus CAN, 1x SPI, 1x I²C, 5x CAN, 4x 5-pin OLLO Ports DYNAMIXEL 3x RS485, 3x TTL Audio Plusieurs séquences programmables LED programmables 4x User LED LED d'état 1x Board status LED1x Arduino LED1x Power LED Boutons et interrupteurs 2x boutton poussoir, 1x bouton Reset, 2x DIPswitch Batterie Lithium polymer 11.1 V 1800 mAh / 19.98 Wh 5C Connexion PC USB Mise à jour du micrologiciel par USB / par JTAG Adaptateur d'alimentation (SMPS) Entrée: 100-240 VCA 50/60 Hz, 1.5 A @maxSortie: 12 VCC, 5 A Téléchargements Programmation de robots ROS GitHub Manuel électronique Communauté
€ 1.879,00
Meilleur prix
-

Unitree Unitree Go2 Edu Robot quadrupède
Retard temporaire dans la livraison des robots Unitree Comme de nombreux autres fournisseurs, nous rencontrons actuellement des retards dans la livraison des robots Unitree. Un envoi de notre fournisseur est actuellement bloqué en douane, ce qui entraîne un retard dans la livraison des commandes déjà passées. Nous travaillons activement avec notre fournisseur pour résoudre ce problème et espérons obtenir plus de clarté bientôt, mais nous ne pouvons malheureusement pas garantir de délais précis pour le moment. Un nouvel envoi est également en cours d'acheminement, mais il faudra un certain temps avant qu'il n'arrive. Comme d'autres fournisseurs rencontrent les mêmes difficultés, changer de prestataire ne permettrait pas d’obtenir une solution plus rapide. Notre priorité est d’honorer les commandes existantes. Si vous avez des questions ou souhaitez modifier votre commande, n’hésitez pas à contacter notre service client. Nous vous tiendrons informés des prochains développements. La série Unitree Go2 se compose de robots quadrupèdes destinés à la recherche et au développement de systèmes autonomes dans les domaines de l'interaction homme-robot (HRI), du SLAM et du transport. Grâce à ses quatre pattes et à ses 12 degrés de liberté, ce robot peut évoluer sur des terrains variés. Le Go2 est équipé d'un système perfectionné de gestion de l'entraînement et de la puissance, qui permet une vitesse (selon la version) allant jusqu'à 3,7 m/s ou 11,88 km/h, avec une autonomie pouvant atteindre 4 heures. De plus, les moteurs ont un couple de 45 N.m au niveau du corps/des cuisses et des genoux, ce qui permet également des sauts ou des saltos arrière. Caractéristiques Système de reconnaissance ultra-performant : LIDAR 4D L1 Vitesse de course maximale : environ 5 m/s Couple d'articulation maximal : environ 45 N.m Module sans fil : Wi-Fi 6/Bluetooth/4G Autonomie ultra-longue : environ 2 à 4 h (longue durée de vie mesurée en conditions réelles) Système de suivi latéral intelligent : ISS 2.0 Spécifications Module de suivi : Suivi automatique ou télécommandé Caméra frontale : Résolution de transmission d'image : 1280 x 720, champ de vision : 120°, objectif ultra grand angle pour une clarté exceptionnelle. Feu avant : Éclaire intensément la route. LiDAR 4D L1 : Balayage omnidirectionnel ultra grand angle 360° x 90° permettant un évitement automatique avec un angle mort réduit et un fonctionnement stable. 12 moteurs d'articulation : Robuste et puissant, élégant et simple, une expérience visuelle inédite. Microphone interphone : Communication efficace sans restriction de scénario. Sangle auto-rétractable : Facile à transporter et à charger. Plus stable, plus puissant grâce à des appareils avancés. LiDAR 3D, carte ESIM 4G, Wi-Fi 6 bi-bande, Bluetooth 5.2 pour une connexion stable et un contrôle à distance. Puissant cœur de calcul : contrôleur de mouvement, processeur ARM hautes performances, processeur à algorithme d'intelligence artificielle amélioré, ORIN NX/NANO externe. Batterie intelligente : batterie standard de 8000 mAh, batterie longue durée de 15000 mAh, protection contre les surchauffes, les surcharges et les courts-circuits. Haut-parleur pour écouter de la musique : écoutez votre musique comme bon vous semble. Variantes de l'Unitree Go2 Le Go2 impressionne non seulement par ses capacités techniques, mais aussi par son design moderne et fin qui lui confère un look futuriste et attire tous les regards. Le Go2 Air est spécialement conçu pour les démonstrations et les présentations. Grâce à ses fonctionnalités de base, il offre une base solide pour démontrer les capacités de mouvement et les fonctionnalités d'un robot à quatre pattes. Important : Le Go2 Air est livré sans contrôleur. Celui-ci est disponible en option. Équipés d'un puissant processeur 8 cœurs hautes performances, les modèles Pro et Edu offrent une puissance de calcul impressionnante, indispensable aux tâches complexes et aux calculs exigeants. Cela permet un traitement des données plus rapide et plus efficace, faisant des modèles Pro et Edu des partenaires fiables pour vos projets. À partir de la version Edu, le Go2 est programmable et offre des possibilités infinies pour le développement et la recherche de vos propres applications robotiques. Le Go2 est également capable de gérer une hauteur de marche allant jusqu'à 14 cm. Cela en fait un outil idéal pour la recherche, l'éducation et l'initiation au monde de la robotique. Le Go2 Edu est livré avec une télécommande pour un contrôle simple et intuitif. Il dispose également d'une station d'accueil d'une puissance de calcul impressionnante de 100 TOPS, équipée de puissants algorithmes d'IA et d'une assistance technique. Le Go2 Edu est équipé d'une puissante batterie de 15000 mAh qui lui confère une autonomie impressionnante allant jusqu'à 4 heures. Cette longue durée de fonctionnement permet au robot d'effectuer des missions d'exploration plus longues et d'accomplir des tâches exigeantes. Comparaison des modèles Air Pro Edu/Edu Plus Dimensions (debout) 70 x 31 x 40 cm 70 x 31 x 40 cm 70 x 31 x 40 cm Dimensions (accroupi) 76 x 31 x 20 cm 76 x 31 x 20 cm 76 x 31 x 20 cm Matériau Alliage d'aluminium + Plastique technique haute résistance Alliage d'aluminium + Plastique technique haute résistance Alliage d'aluminium + Plastique technique haute résistance plastique Poids (avec batterie) environ 15 kg environ 15 kg environ 15 kg Tension 28~33,6 V 28~33,6 V 28~33,6 V Puissance de pointe environ 3000 W environ 3000 W Charge utile ≈7 kg (MAX ~ 10 kg) ≈8 kg (MAX ~ 10 kg) ≈8 kg (MAX ~ 12 kg) Vitesse 0~2,5 m/s 0~3,5 m/s 0~3,7 m/s (MAX ~ 5 m/s) Hauteur de montée/chute max. environ 15 cm environ 16 cm environ 16 cm Angle de montée max. 30° 40° 40° Puissance de calcul de base N/A 8 cœurs hautes performances Processeur Processeur 8 cœurs hautes performances Moteur d'articulation du genou en aluminium Ensemble de 12 Ensemble de 12 Ensemble de 12 Circuit intra-articulaire (genou) ✓ ✓ ✓ Refroidisseur de caloduc articulaire ✓ ✓ ✓ Amplitude de mouvement Corps : −48~48° Corps : −48~48° Corps : −48~48° Cuisse : −200°~90° Cuisse : −200°~90° Cuisse : −200°~90° Jarret : −156°~−48° Jarret : −156°~−48° Couple max. N/A Environ 45 N.m Environ 45 N.m LiDAR 3D super grand-angle ✓ ✓ ✓ Module de suivi de positionnement vectoriel sans fil N/A ✓ ✓ Grand angle HD Caméra ✓ ✓ ✓ Capteur de force côté pied N/A N/A ✓ Action de base ✓ ✓ ✓ Sangle de mise à l'échelle automatique N/A ✓ N/A OTA intelligent amélioré ✓ ✓ ✓ Transmission d'images RTT 2.0 ✓ ✓ ✓ Télécommande de base via l'application ✓ ✓ ✓ Visualisation des données via l'application ✓ ✓ ✓ Programme graphique via l'application ✓ ✓ ✓ Lampe frontale (3) W) ✓ ✓ ✓ Wi-Fi 6 double bande ✓ ✓ ✓ Bluetooth 5.2/4.2/2.1 ✓ ✓ ✓ Module 4G N/A CN/GB CN/GB Voix Fonction N/A ✓ ✓ Lecture musicale N/A ✓ ✓ Système intelligent de suivi latéral ISS 2.0 N/A ✓ ✓ Détection et évitement intelligents ✓ ✓ ✓ Secondaire Développement N/A N/A ✓ Contrôleur manuel En option En option ✓ Module haute puissance de calcul N/A N/A Edu : 40 TOPS de puissance de calcul Edu Plus : 100 TOPS de puissance de calcul NVIDIA Jetson Orin (en option) Smart Batterie Standard (8000 mAh) Standard (8000 mAh) Longue autonomie (15000 mAh) Autonomie 1 à 2 h 1 à 2 h 2 à 4 h Chargeur Standard (33,6 V, 3,5 A) Standard (33,6 V, 3,5 A) Charge rapide (33,6 V, 9 A) Inclus 1x Unitree Go2 Edu 1x Unitree Go2 télécommande 1x Unitree Go2 batterie (15000 mAh) 1x Unitree station d'accueil avec une puissance de calcul de 40 TOPS Téléchargements Documentation iOS/Android apps GitHub
€ 12.499,00
Meilleur prix
-
Clearpath Robotics Clearpath Robotics TurtleBot 4 Lite
TurtleBot 4 est la nouvelle génération de la plateforme robotique open source la plus populaire au monde pour l'éducation et la recherche, offrant une meilleure puissance de calcul, de meilleurs capteurs et une expérience utilisateur de classe mondiale à un prix abordable. TurtleBot 4 Lite est équipée d'une base mobile iRobot Create3, d'un puissant Raspberry Pi 4 exécutant ROS 2, d'une caméra stéréo spatiale OAK-D AI, d'un LiDAR 2D et de bien d'autres choses encore. Tous les composants ont été intégrés de manière transparente pour offrir une plateforme de développement et d'apprentissage prête à l'emploi. Profitez de la communauté florissante de développeurs ROS open source et commencez à apprendre la robotique dès le premier jour. Spécifications Plate-forme de base iRobot Create 3 Roues (diamètre) 72 mm Garde au sol 4,5 mm Ordinateur de bord Raspberry Pi 4 (4 Go) Vitesse linéaire maximale 0,31 m/s en mode sécurisé0,46 m/s sans mode sécurisé Vitesse angulaire maximale 1,90 rad/s Charge utile maximale 9 kg Temps de fonctionnement 2h 30m - 4h selon la charge Temps de charge 2h 30m Lidar RPLIDAR A1M8 Caméra OAK-D-Lite Alimentation utilisateur VBAT @1.9 A5 V @ faible courant3,3 V @ faible courant Extension USB 2x USB 2.0 (Type A)2x USB 3.0 (Type A) LED programmables Créer 3 anneaux lumineux Boutons et interrupteurs 2x boutons d'utilisateur Create 31x bouton d'alimentation Create3 Batterie 26 Wh Lithium Ion (14,4 V nominal) Station d'accueil Inclus Taille (L x L x H) 342 x 339 x 192 mm Poids 3,3 kg Téléchargements • Manuel de l’utilisateur
€ 1.699,00
Meilleur prix
-

Unitree Unitree Go2 Air Robot quadrupède
Retard temporaire dans la livraison des robots Unitree Comme de nombreux autres fournisseurs, nous rencontrons actuellement des retards dans la livraison des robots Unitree. Un envoi de notre fournisseur est actuellement bloqué en douane, ce qui entraîne un retard dans la livraison des commandes déjà passées. Nous travaillons activement avec notre fournisseur pour résoudre ce problème et espérons obtenir plus de clarté bientôt, mais nous ne pouvons malheureusement pas garantir de délais précis pour le moment. Un nouvel envoi est également en cours d'acheminement, mais il faudra un certain temps avant qu'il n'arrive. Comme d'autres fournisseurs rencontrent les mêmes difficultés, changer de prestataire ne permettrait pas d’obtenir une solution plus rapide. Notre priorité est d’honorer les commandes existantes. Si vous avez des questions ou souhaitez modifier votre commande, n’hésitez pas à contacter notre service client. Nous vous tiendrons informés des prochains développements. La série Unitree Go2 se compose de robots quadrupèdes destinés à la recherche et au développement de systèmes autonomes dans les domaines de l'interaction homme-robot (HRI), du SLAM et du transport. Grâce à ses quatre pattes et à ses 12 degrés de liberté, ce robot peut évoluer sur des terrains variés. Le Go2 est équipé d'un système perfectionné de gestion de l'entraînement et de la puissance, qui permet une vitesse (selon la version) allant jusqu'à 3,7 m/s ou 11,88 km/h, avec une autonomie pouvant atteindre 4 heures. De plus, les moteurs ont un couple de 45 N.m au niveau du corps/des cuisses et des genoux, ce qui permet également des sauts ou des saltos arrière. Caractéristiques Système de reconnaissance ultra-performant : LIDAR 4D L1 Vitesse de course maximale : environ 5 m/s Couple d'articulation maximal : environ 45 N.m Module sans fil : Wi-Fi 6/Bluetooth/4G Autonomie ultra-longue : environ 2 à 4 h (longue durée de vie mesurée en conditions réelles) Système de suivi latéral intelligent : ISS 2.0 Spécifications Module de suivi : Suivi automatique ou télécommandé Caméra frontale : Résolution de transmission d'image : 1280 x 720, champ de vision : 120°, objectif ultra grand angle pour une clarté exceptionnelle. Feu avant : Éclaire intensément la route. LiDAR 4D L1 : Balayage omnidirectionnel ultra grand angle 360° x 90° permettant un évitement automatique avec un angle mort réduit et un fonctionnement stable. 12 moteurs d'articulation : Robuste et puissant, élégant et simple, une expérience visuelle inédite. Microphone interphone : Communication efficace sans restriction de scénario. Sangle auto-rétractable : Facile à transporter et à charger. Plus stable, plus puissant grâce à des appareils avancés. LiDAR 3D, carte ESIM 4G, Wi-Fi 6 bi-bande, Bluetooth 5.2 pour une connexion stable et un contrôle à distance. Puissant cœur de calcul : contrôleur de mouvement, processeur ARM hautes performances, processeur à algorithme d'intelligence artificielle amélioré, ORIN NX/NANO externe. Batterie intelligente : batterie standard de 8000 mAh, batterie longue durée de 15000 mAh, protection contre les surchauffes, les surcharges et les courts-circuits. Haut-parleur pour écouter de la musique : écoutez votre musique comme bon vous semble. Variantes de l'Unitree Go2 Le Go2 impressionne non seulement par ses capacités techniques, mais aussi par son design moderne et fin qui lui confère un look futuriste et attire tous les regards. Le Go2 Air est spécialement conçu pour les démonstrations et les présentations. Grâce à ses fonctionnalités de base, il offre une base solide pour démontrer les capacités de mouvement et les fonctionnalités d'un robot à quatre pattes. Important : Le Go2 Air est livré sans contrôleur. Celui-ci est disponible en option. Équipés d'un puissant processeur 8 cœurs hautes performances, les modèles Pro et Edu offrent une puissance de calcul impressionnante, indispensable aux tâches complexes et aux calculs exigeants. Cela permet un traitement des données plus rapide et plus efficace, faisant des modèles Pro et Edu des partenaires fiables pour vos projets. À partir de la version Edu, le Go2 est programmable et offre des possibilités infinies pour le développement et la recherche de vos propres applications robotiques. Le Go2 est également capable de gérer une hauteur de marche allant jusqu'à 14 cm. Cela en fait un outil idéal pour la recherche, l'éducation et l'initiation au monde de la robotique. Le Go2 Edu est livré avec une télécommande pour un contrôle simple et intuitif. Il dispose également d'une station d'accueil d'une puissance de calcul impressionnante de 100 TOPS, équipée de puissants algorithmes d'IA et d'une assistance technique. Le Go2 Edu est équipé d'une puissante batterie de 15000 mAh qui lui confère une autonomie impressionnante allant jusqu'à 4 heures. Cette longue durée de fonctionnement permet au robot d'effectuer des missions d'exploration plus longues et d'accomplir des tâches exigeantes. Comparaison des modèles Air Pro Edu/Edu Plus Dimensions (debout) 70 x 31 x 40 cm 70 x 31 x 40 cm 70 x 31 x 40 cm Dimensions (accroupi) 76 x 31 x 20 cm 76 x 31 x 20 cm 76 x 31 x 20 cm Matériau Alliage d'aluminium + Plastique technique haute résistance Alliage d'aluminium + Plastique technique haute résistance Alliage d'aluminium + Plastique technique haute résistance plastique Poids (avec batterie) environ 15 kg environ 15 kg environ 15 kg Tension 28~33,6 V 28~33,6 V 28~33,6 V Puissance de pointe environ 3000 W environ 3000 W Charge utile ≈7 kg (MAX ~ 10 kg) ≈8 kg (MAX ~ 10 kg) ≈8 kg (MAX ~ 12 kg) Vitesse 0~2,5 m/s 0~3,5 m/s 0~3,7 m/s (MAX ~ 5 m/s) Hauteur de montée/chute max. environ 15 cm environ 16 cm environ 16 cm Angle de montée max. 30° 40° 40° Puissance de calcul de base N/A 8 cœurs hautes performances Processeur Processeur 8 cœurs hautes performances Moteur d'articulation du genou en aluminium Ensemble de 12 Ensemble de 12 Ensemble de 12 Circuit intra-articulaire (genou) ✓ ✓ ✓ Refroidisseur de caloduc articulaire ✓ ✓ ✓ Amplitude de mouvement Corps : −48~48° Corps : −48~48° Corps : −48~48° Cuisse : −200°~90° Cuisse : −200°~90° Cuisse : −200°~90° Jarret : −156°~−48° Jarret : −156°~−48° Couple max. N/A Environ 45 N.m Environ 45 N.m LiDAR 3D super grand-angle ✓ ✓ ✓ Module de suivi de positionnement vectoriel sans fil N/A ✓ ✓ Grand angle HD Caméra ✓ ✓ ✓ Capteur de force côté pied N/A N/A ✓ Action de base ✓ ✓ ✓ Sangle de mise à l'échelle automatique N/A ✓ N/A OTA intelligent amélioré ✓ ✓ ✓ Transmission d'images RTT 2.0 ✓ ✓ ✓ Télécommande de base via l'application ✓ ✓ ✓ Visualisation des données via l'application ✓ ✓ ✓ Programme graphique via l'application ✓ ✓ ✓ Lampe frontale (3) W) ✓ ✓ ✓ Wi-Fi 6 double bande ✓ ✓ ✓ Bluetooth 5.2/4.2/2.1 ✓ ✓ ✓ Module 4G N/A CN/GB CN/GB Voix Fonction N/A ✓ ✓ Lecture musicale N/A ✓ ✓ Système intelligent de suivi latéral ISS 2.0 N/A ✓ ✓ Détection et évitement intelligents ✓ ✓ ✓ Secondaire Développement N/A N/A ✓ Contrôleur manuel En option En option ✓ Module haute puissance de calcul N/A N/A Edu : 40 TOPS de puissance de calcul Edu Plus : 100 TOPS de puissance de calcul NVIDIA Jetson Orin (en option) Smart Batterie Standard (8000 mAh) Standard (8000 mAh) Longue autonomie (15000 mAh) Autonomie 1 à 2 h 1 à 2 h 2 à 4 h Chargeur Standard (33,6 V, 3,5 A) Standard (33,6 V, 3,5 A) Charge rapide (33,6 V, 9 A) Inclus 1x Unitree Go2 Air 1x Unitree Go2 batterie (8000 mAh) Téléchargements Documentation iOS/Android apps GitHub
€ 2.650,00
Meilleur prix

















