Description
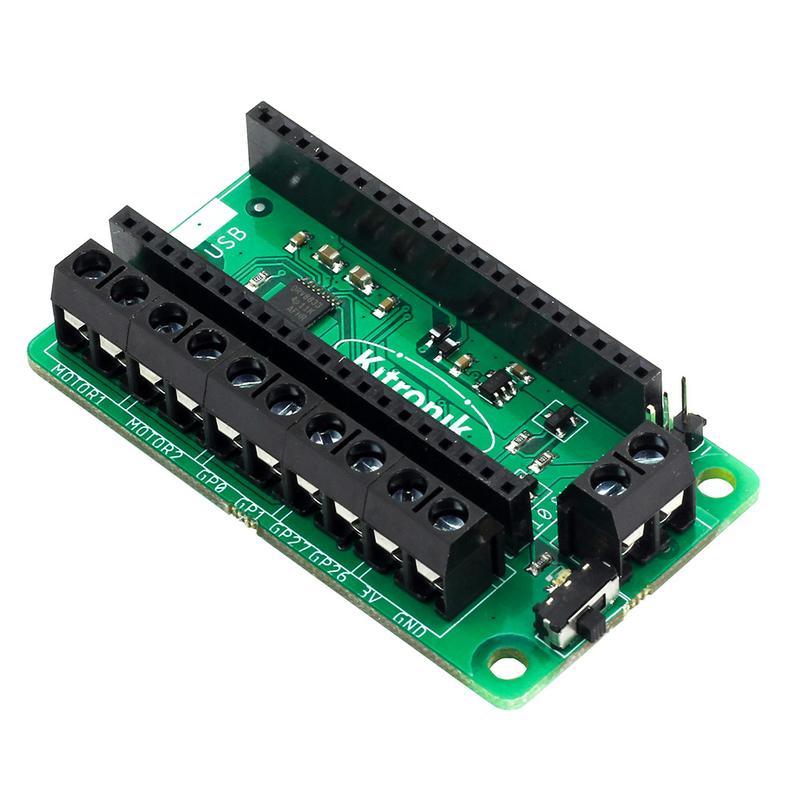
Cette carte permet au Raspberry Pi Pico (connecté via un connecteur) de commander deux moteurs simultanément avec un contrôle complet de marche avant, arrière et stop, ce qui la rend idéale pour les projets de buggy contrôlés par le Pico. Elle peut également être utilisée pour alimenter un moteur pas à pas. Elle comporte le circuit intégré de commande de moteur DRV8833, qui dispose d'une protection interne contre les courts-circuits, les surintensités et la chaleur.
La carte dispose de 4 connexions externes aux broches GPIO et d'une alimentation 3 V et GND du Pico. Cela permet d'ajouter des options d'E/S supplémentaires pour vos projets de buggy, qui peuvent être lues ou contrôlées par le Pico. En outre, il y a un interrupteur marche/arrêt et une LED d'état d'alimentation, vous permettant de vérifier si la carte est sous tension et d'économiser vos piles lorsque votre projet n'est pas en cours d'utilisation.
Pour utiliser la carte de commande de moteur, le Pico doit être doté d'un connecteur soudé et être fermement inséré. La carte fournit une alimentation régulée qui est utilisée par le connecteur à 40 voies pour alimenter le Pico, éliminant ainsi la nécessité d'alimenter le Pico directement. La carte de pilotage du moteur est alimentée soit par des bornes à vis, soit par un connecteur de type servo.
Kitronik a développé un module micro-python et un exemple de code pour soutenir l'utilisation de la carte de commande de moteur avec le Pico. Ce code est disponible sur GitHub repo.
Caractéristiques
- Une carte compacte mais dotée de nombreuses fonctionnalités, conçue pour être au cœur de vos projets de robots buggy avec le Raspberry Pi Pico.
- La carte peut commander 2 moteurs simultanément avec une contrôle complet de la marche avant, arrière et de l'arrêt.
- Il est équipé du circuit intégré de commande de moteur DRV8833, qui dispose d'une protection intégrée contre les courts-circuits, les surintensités et la température.
- En plus, la carte comporte un interrupteur marche/arrêt et une LED d'état d'alimentation.
- Alimentez la carte via un connecteur de type bornier.
- Les broches 3V et GND sont également sorties, ce qui permet d'alimenter des dispositifs externes.
- Codez-le avec MicroPython avec un éditeur tel que the Thonny editor.
- Dimensions: 63 mm (L) x 35 mm (W) x 11.6 mm (H)
Téléchargement