Produits
-
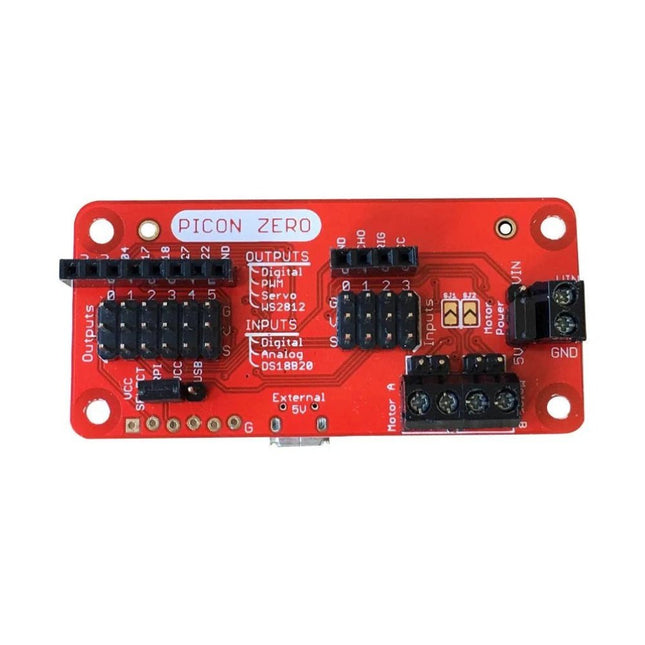
4tronix 4tronix Picon Zero v1.3 – Intelligent Robotics Controller for Raspberry Pi
Le Picon Zero est un module complémentaire pour le Raspberry Pi. Il a la même taille qu'un Raspberry Pi Zero, ce qui le rend idéal pour fonctionner comme un pHat. Bien entendu, il peut être utilisé sur n’importe quel autre Raspberry Pi via un connecteur GPIO 40 broches. En plus de deux pilotes de moteur H-Bridge complets, le Picon Zero dispose de plusieurs broches d'entrée/sortie vous offrant plusieurs options de configuration. Cela vous permet d'ajouter facilement des sorties ou des entrées analogiques à votre Raspberry Pi sans logiciel compliqué ni pilote spécifique au noyau. En même temps, il ouvre 5 broches GPIO du Raspberry Pi et fournit l'interface pour un capteur de distance à ultrasons HC-SR04. Le Picon Zero est livré avec tous les composants, y compris les embases et les bornes à vis, entièrement soudés. La soudure n'est pas nécessaire. Vous pouvez l'utiliser dès la sortie de la boîte. Caractéristiques PCB format pHat : 65 mm x 30 mm Deux pilotes de moteur H-Bridge complets. Pilotez jusqu'à 1,5 A en continu par canal, entre 3 V et 11 V. Chaque sortie moteur possède à la fois un connecteur mâle à 2 broches et une borne à vis à 2 broches. Les moteurs peuvent être alimentés par le 5 V du Picon Zero ou par une source d'alimentation externe (3 V - 11 V). Le 5 V du Picon Zero peut être sélectionné parmi la ligne 5 V du Raspberry Pi ou un connecteur USB sur le Picon Zero. Cela signifie que vous pouvez effectivement disposer de 2 banques de batteries USB : une pour alimenter les servos et les moteurs du Picon Zero et l'autre pour alimenter le Pi. 4 Entrées pouvant accepter jusqu'à 5 V. Ces entrées peuvent être configurées comme suit : Entrées numériques Entrées analogiques DS18B20 DHT11 6 sorties pouvant piloter 5 V et être configurées comme : Sortie numérique Sortie PWM Servomoteur NéoPixel WS2812 Toutes les entrées et sorties utilisent des embases mâles GVS à 3 broches. Embase femelle à 4 broches qui se connecte directement à un capteur de distance à ultrasons HC-SR04. Connecteur femelle à 8 broches pour les signaux Ground, 3,3 V, 5 V et 5 GPIO vous permettant d'ajouter leurs fonctionnalités supplémentaires. Configuration matérielle Picon Zero dispose de deux cavaliers pour définir la configuration matérielle. Assurez-vous de les avoir placés dans la bonne position. JP1 – Carte Sélecteur 5V. Ce cavalier sélectionne l'endroit où obtenir l'alimentation 5 V pour les sorties Picon Zero. Les options sont : Cavalier en haut entre RPI et 5 V. L'alimentation 5 V de la carte provient des broches Raspberry Pi du connecteur GPIO. En raison des appareils à faible puissance de sortie et des moteurs 5 V, tous les appareils peuvent être alimentés avec une seule entrée d'alimentation 5 V. Jumper en bas entre USB et 5 V. L'alimentation 5 V provient du connecteur microUSB du Picon Zero. Utile pour les appareils à puissance de sortie plus élevée, puisque vous pouvez fournir une alimentation supplémentaire via le connecteur micro-USB sur la carte JP2 – Sélecteur de puissance du moteur. Ce cavalier sélectionne l'endroit où les moteurs reçoivent la puissance. Les deux options ici sont les suivantes : Cavalier en haut entre MotorPower et Vin. Les moteurs sont entraînés via le bornier à vis à 2 broches. La tension peut être comprise entre 3 V et 11 V. Utile pour les moteurs qui nécessitent une tension différente de 5 V, ou qui nécessitent plus de courant que celui disponible sur l'un des connecteurs d'entrée USB. Cavalier en bas entre 5 V et MotorPower. Les moteurs sont alimentés par le 5 V de la carte. Configuration du Raspberry Pi Le Picon Zero est un appareil I²C. Assurez-vous que votre Raspberry Pi est correctement configuré pour utiliser I²C et SMBus : sudo apt-get install python-smbus python3-smbus python-dev python3-dev sudo nano /boot/config.txt Ajoutez les lignes suivantes à la fin du fichier dtparam=i2c1=on dtparam=i2c_arm=on Appuyez sur Ctrl-X et utilisez les invites par défaut pour enregistrer redémarrage sudo Branchez le Picon Zero sur le Pi et exécutez i2cdetect -y 1 Si tout se passe bien, vous verrez le Picon Zero apparaître comme adresse 22 comme indiqué ci-dessous :
€ 18,95€ 7,58
Membres identique
