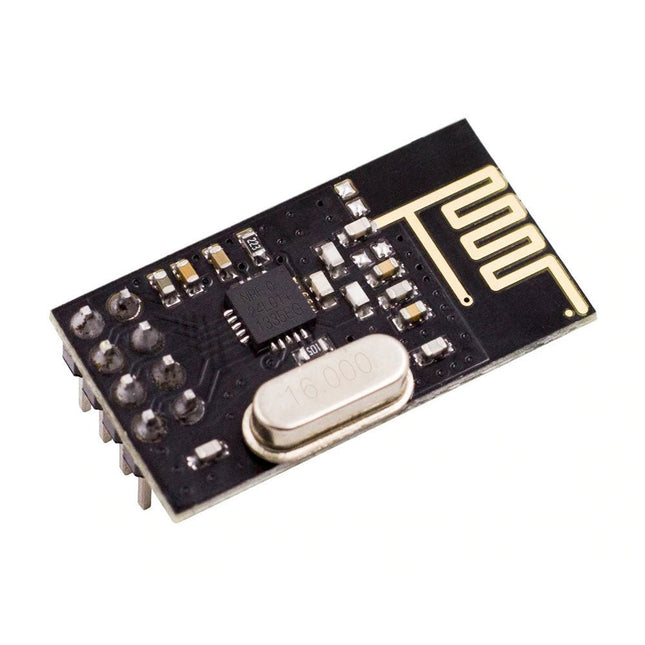
NRF24L01 est une puce émetteur-récepteur monolithique universelle en bande ISM fonctionnant dans la bande 2,4-2,5 GHz. Caractéristiques
Émetteur-récepteur sans fil comprenant : Générateur de fréquence, type amélioré, SchockBurstTM, contrôleur de mode, amplificateur de puissance, amplificateur à cristal, modulateur, démodulateur
La sélection du canal de puissance de sortie et les paramètres du protocole peuvent être définis avec une consommation de courant extrêmement faible, via l'interface SPI.
En mode de transmission, la puissance de transmission est de 6 dBm, le courant est de 9,0 mA, le courant du mode accepté est de 12,3 mA, la consommation de courant du mode mise hors tension et du mode veille est inférieure
Antenne 2,4 GHz intégrée, prend en charge jusqu'à six canaux de réception de données
Taille : 15 x 29 mm (antenne comprise)
35 Touch Develop & MicroPython Projects
The BBC micro:bit is a credit sized computer based on a highly popular and high performance ARM processor. The device is designed by a group of 29 partners for use in computer education in the UK and will be given free of charge to every secondary school student in the UK.
The device is based on the Cortex-M0 processor and it measures 4 x 5 cm. It includes several important sensors and modules such as an accelerometer, magnetometer, 25 LEDs, 2 programmable push-button switches, Bluetooth connectivity, micro USB socket, 5 ring type connectors, and a 23-pin edge connector. The device can be powered from its micro USB port by connecting it to a PC, or two external AAA type batteries can be used.
This book is about the use of the BBC micro:bit computer in practical projects. The BBC micro:bit computer can be programmed using several different programming languages, such as Microsoft Block Editor, Microsoft Touch Develop, MicroPython, and JavaScript.
The book makes a brief introduction to the Touch Develop programming language and the MicroPython programming language. It then gives 35 example working and tested projects using these language. Readers who learn to program in Touch Develop and MicroPython should find it very easy to program using the Block Editor or any other languages.
The following are given for each project:
Title of the project
Description of the project
Aim of the project
Touch Develop and MicroPython program listings
Complete program listings are given for each project. In addition, working principles of the projects are described briefly in each section. Readers are encouraged to go through the projects in the order given in the book.
Le clavier-plus-hub est officiel avec le Raspberry Pi comme clavier standard FR avec trois ports USB 2.0 type A supplémentaire pour les périphériques externes. Le clavier est disponible avec différentes options de langue/paiements, comme détaillé ci-dessous.
Clavier FR (AZERTY)
Trois ports USB 2.0 type A pour périphériques externes
Détection automatique de la langue du clavier
Câble USB type A versus micro USB type B incluant la connexion avec un adaptateur compatible
Conception ergonomique pour une utilisation confortable
Compatible avec les produits Raspberry Pi
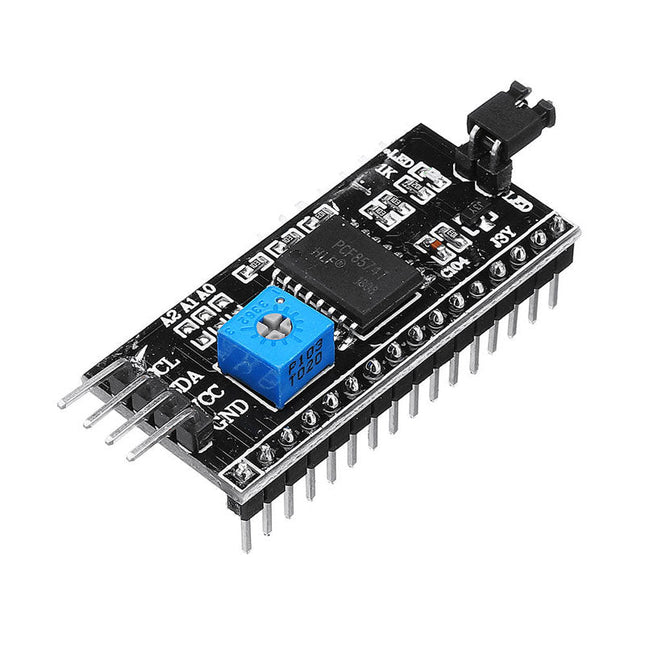
Il s'agit d'une autre excellente interface série IIC/I²C/TWI/SPI. Comme les ressources en broches du contrôleur sont limitées, votre projet risque de ne pas pouvoir utiliser le blindage LCD normal après avoir été connecté à une certaine quantité de capteurs ou de carte SD. Cependant, avec ce module d'interface I²C, vous pourrez réaliser l'affichage des données via seulement 2 fils. Si vous avez déjà des appareils I²C dans votre projet, ce module LCD ne coûte en réalité aucune ressource supplémentaire. C'est fantastique pour un projet basé.
Adresse I²C : 0X20~0X27 (l'adresse d'origine est 0X20, vous pouvez la modifier vous-même)
Le rétroéclairage et le contraste sont ajustés par potentiomètre
Livré avec 2 interfaces IIC, qui peuvent être connectées par Dupont Line ou un câble dédié IIC Adresse I²C : 0x27 (Adresse I²C : 0X20~0X27 (l'adresse d'origine est 0X27, vous pouvez la modifier vous-même)
Caractéristiques
Compatible pour 1602 LCD
Tension d'alimentation : 5 V
Poids : 5g
Taille: 5,5 x 2,3 x 1,4 cm
Remarque : NodeMCU est le nom d'un micrologiciel et d'une carte. NodeMCU est une plateforme IoT open source, dont le firmware fonctionne sur le SoC Wi-Fi ESP8266 d'Espressif, basé sur le SDK ESP8266 nonOS . Son matériel est basé sur le module ESP-12. Le langage de script est Lua qui permet d'utiliser de nombreux projets open source comme lua-cjson et spiffs.
Caractéristiques
Module Wi-Fi – Module ESP-12E similaire au module ESP-12 mais avec 6 GPIO supplémentaires.
USB – port micro USB pour l’alimentation, la programmation et le débogage
En-têtes – 2 connecteurs 2,54 mm à 15 broches avec accès aux GPIO, SPI, UART, ADC et broches d'alimentation
Boutons de réinitialisation et de flash
Alimentation : 5 V via port micro USB
Dimensions : 49 x 24,5 x 13 mm
Caractéristiques
Matériau de la puce NFC : PET + antenne de gravure
Puce : NTAG216 (compatible avec tous les téléphones NFC)
Fréquence : 13,56 MHz (haute fréquence)
Temps de lecture : 1 - 2 ms
Capacité de stockage : 888 octets
Temps de lecture et d'écriture : > 100 000 fois
Distance de lecture : 0 - 5 mm
Conservation des données : > 10 ans
Taille de la puce NFC : Diamètre 30 mm
Sans contact, sans friction, le taux de défaillance est faible, faibles coûts de maintenance
Taux de lecture, vitesse de vérification, ce qui peut effectivement gagner du temps et améliorer l'efficacité
Étanche, anti-poussière, anti-vibration
Aucune alimentation n'est fournie avec une antenne, une logique de contrôle de cryptage intégrée et un circuit logique de communication
Inclus
1x autocollants NFC (kit 6 couleurs)
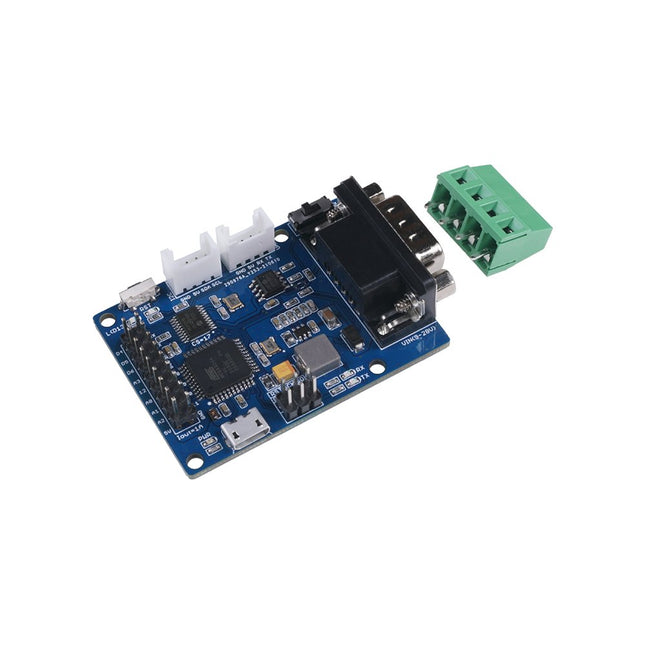
Le kit de développement CAN-BUS Arduino CANBed de Seeed Studio intègre un microcontrôleur ATmega32U4, éliminant ainsi le besoin d'une carte Arduino externe. Il combine un contrôleur de bus CAN MCP2515 et un émetteur-récepteur de bus CAN MCP2551 sur une seule carte, offrant une solution de communication CAN compacte et fiable.
Caractéristiques
ATmega32U4 avec le bootloader Arduino Leonardo
Contrôleur de bus CAN MCP2515 et émetteur-récepteur de bus CAN MCP2551
Brochage standard OBD-II et CAN sélectionnable au niveau du connecteur sub-D
Compatible avec l'IDE Arduino
Paramètre
Valeur
Microcontrôleur
ATmega32U4 (avec bootloader Arduino Leonardo)
Vitesse d'horloge
16 MHz
Mémoire flash
32 Ko
SRAM
2,5 Ko
EEPROM
1 KB
Tension de fonctionnement (CAN-USB)
9 V - 28 V
Tension de fonctionnement (MicroUSB)
5 V
Interface d'entrée
sub-D
Inclus
CANBed PCBA
Connecteur Sub-D
Connecteur 4PIN
2 connecteurs 4PIN 2.0
1 connecteur 9x2 2,54
1 connecteur 3x2 2.54
Découvrez le boîtier idéal pour votre Raspberry Pi 5. FLIRC a rendu le bouton d'alimentation accessible et l'a amélioré avec un support LED. Profitez du dissipateur thermique en aluminium si apprécié, niché entre les deux panneaux soft-touch noir mat, qui s'intègrent parfaitement à votre système de divertissement.
Dissipateur thermique intégré
Il s'agit du premier boîtier Raspberry Pi abordable fabriqué en aluminium. Le principe de FLIRC était que la forme n'était pas plus importante que la fonction, ils ont donc immédiatement utilisé l'aluminium du boîtier comme dissipateur de chaleur. Le boîtier comprend également un coussin thermique et 4 vis pour faciliter le montage.
Stabilité et accès
Le FLIRC est équipé de pieds en caoutchouc qui permettent de surélever légèrement le boîtier, de sorte qu'il puisse être glissé sous votre téléviseur, par exemple. Outre le dissipateur thermique intégré, de petites fentes d'aération sur le fond permettent au Raspberry Pi de rester au frais. Les broches GPIO sont accessibles via la fente située au bas du boîtier, et pour accéder à la carte SD, il n'est pas nécessaire de démonter le boîtier.
Bouton d'alimentation et support LED
Le bouton d'alimentation du Raspberry Pi 5 est pris en charge par le boîtier FLIRC en standard. Les LED des différentes notifications sont également bien visibles.
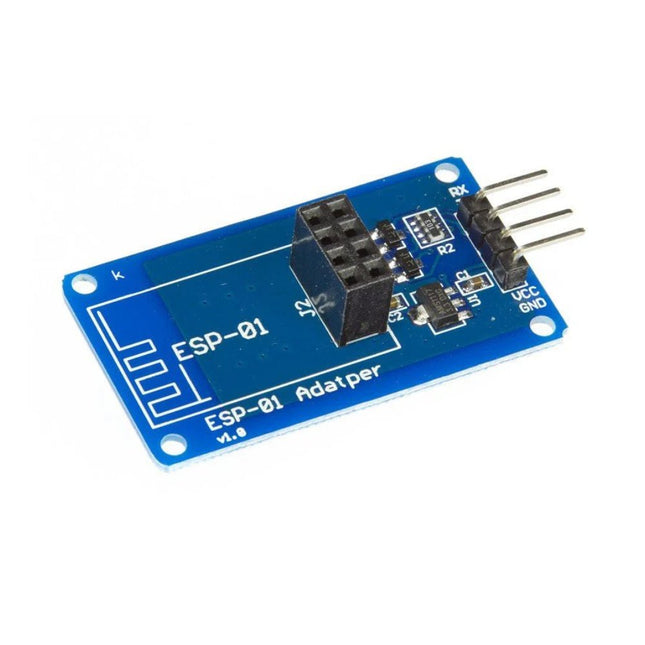
L'adaptateur ESP-01 3,3-5 V est la solution idéale pour connecter un module ESP-01 ESP8266 à un système 5 V tel qu'Arduino Uno.
Caractéristiques
Module de connexion pour module WiFi ESP-01
Circuit régulateur de tension 3,3 V et conversion de niveau intégrée pour une utilisation facile du microcontrôleur 5 V avec module Wi-Fi ESP-01
Compatible avec Uno R3
4,5~5,5 V (régulateur LDO 3,3 V intégré)
Tension logique d'interface : compatible 3,3-5 V (décalage de niveau intégré)
Courant : 0-240 mA
Ce programmeur a été spécialement conçu pour graver des bootloaders (sans ordinateur) sur les cartes de développement ATmega328P/ATmega328PB compatibles Arduino.
Branchez simplement le programmeur sur l'interface ICSP pour graver à nouveau le chargeur de démarrage. Il est également compatible avec les nouvelles puces, à condition que le circuit intégré soit fonctionnel.
Remarque : graver un chargeur de démarrage efface toutes les données précédentes de la puce.
Caractéristiques
Tension de fonctionnement : 3,1-5,3 V
Courant de fonctionnement : 10 mA
Compatible avec les cartes basées sur Arduino Uno R3 (ATmega328P ou ATmega328PB)
Dimensions : 39,6 x 15,5 x 7,8 mm
The slim, hackable and attractive case for Raspberry Pi 5.
Pibow 5 lets you access all the ports and connectors on your Raspberry Pi and even has a clever little tab that will let you push the Pi 5's brand new power button whilst it's safely ensconced in its case. The case is designed to fit neatly around Raspberry Pi's Active Cooler.
Features
Compatible with Raspberry Pi 5 Official Active Cooler
Super-slimline profile
Fully HAT/pHAT compatible
Protects your Raspberry Pi 5
Clear top leaves Raspberry Pi 5 visible (so you can gaze upon its wonder).
GPIO cut-out
Leaves all ports and connectors accessible
External Power Button Nubbin via compliant mechanism magic
Mounting holes on the base that will accommodate M2.5 screws/bolts and the studs on popular Danish ABS construction blocks
Made from lightweight high-quality cast acrylic
Great for hacking and tinkering
Crafted out of five unique layers including a transparent top that leaves your Raspberry Pi visible inside. Each layer is laser-cut from colourful high-quality cast acrylic and once stacked they securely contain a Raspberry Pi 5 while leaving the primary ports and GPIO accessible.
This case is lightweight and ideal for mounting to any surface. No tools are required for assembly or disassembly!
Un moyen simple de maintenir les pièces au bas d'un PCB pendant le soudage
PartLift maintient les pièces traversantes en place pour libérer vos mains pendant que vous soudez les jambes. Un outil simple mais utile pour accompagner votre Stickvise. Le patin de base est en mousse de silicone antidérapante, le corps de l'outil est en ABS qui procure une très légère tension de ressort pour maintenir votre pièce en place. La pointe de l'outil est en silicone haute température qui résiste aux températures de soudure sans être endommagée.
Caractéristiques
PartLift maintient les pièces traversantes en place pendant le soudage
À utiliser avec un Stickvise ou tout autre support de PCB à profil bas
La panne est en silicone qui résiste aux températures de soudure
Le coussin de base est en mousse de silicone antidérapante
Spécifications
Matériel
Silicone
Dimensions
109 x 40 x 40 mm
Poids
59 g
Raspberry Pi 5 fournit deux connecteurs MIPI à quatre voies, chacun pouvant prendre en charge une caméra ou un écran. Ces connecteurs utilisent le même format FPC « mini » à 22 voies au pas de 0,5 mm que le kit de développement de module de calcul et nécessitent des câbles adaptateurs pour se connecter aux connecteurs au format « standard » à 15 voies au pas de 1 mm du Raspbery Pi actuel. produits d'appareil photo et d'affichage.
Ces câbles adaptateurs mini vers standard pour caméras et écrans (notez qu'un câble de caméra ne doit pas être utilisé avec un écran, et vice versa) sont disponibles en longueurs de 200 mm, 300 mm et 500 mm.
Caractéristiques techniques Dual ARM Cortex-M0+ @ 133 MHz 264 kB on-chip SRAM dans six blocs indépendants Prise en charge de jusqu'à 16 Mo de mémoire Flash hors puce via un bus QSPI dédié. Contrôleur DMA AHB crossbar entièrement connecté Périphériques interpolateurs et diviseurs d’entiers Régulateur LDO sur puce programmable pour générer la tension de base./li> 2x PLL sur puce pour générer les horloges USB et centrales 30x broches GPIO, dont 4 utilisables comme entrées analogiques Périphériques 2x UARTs 2x contrôleurs SPI 2x contrôleurs I²C 16x canaux PWM Contrôleur USB 1.1 et PHY, avec prise en charge de l'hôte et du dispositif 8x Machines d’état PIO Ce que vous recevrez 10x puces RP2040
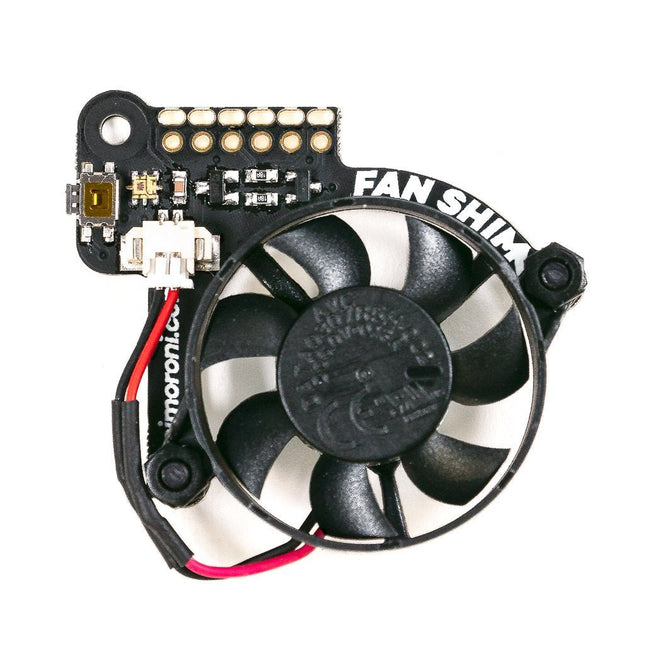
Lorsque le système sur puce (SoC) du Raspberry Pi 4 atteint une certaine température, il réduit sa vitesse de fonctionnement pour se protéger des dommages. En conséquence, vous n’obtenez pas des performances maximales avec l’ordinateur monocarte.
Fan SHIM est un accessoire abordable qui élimine efficacement l’étranglement thermique et améliore les performances du RPi 4. Il est assez simple de fixer le ventilateur SHIM au Raspberry Pi : le ventilateur SHIM utilise un connecteur à ajustement par friction, il se glisse donc simplement sur les broches de votre Pi et il est prêt à fonctionner, aucune soudure n'est nécessaire !
Le ventilateur peut être contrôlé par logiciel, vous pouvez donc l'ajuster à vos besoins, par exemple l'allumer lorsque le processeur atteint une certaine température, etc.
Vous pouvez également programmer la LED comme indicateur visuel de l'état du ventilateur.
L'interrupteur tactile peut également être programmé, vous pouvez donc l'utiliser pour allumer ou éteindre le ventilateur, ou pour basculer entre le mode déclenché par la température ou manuel.
Caractéristiques
Ventilateur 30 mm 5 V CC
4 200 tr/min
Débit d'air de 0,05 m³/min
Bruit acoustique de 18,6 dB (silencieux)
En-tête à ajustement par friction
Aucune soudure requise
LED RVB (APA102)
Interrupteur tactile
Assemblage de base requis
Compatible avec Raspberry Pi 4 (et 3B+, 3A+)
Bibliothèque et démon Python
Brochage
Contenu de la livraison
PCB de cale de ventilateur
Ventilateur 30 mm 5 V CC avec connecteur JST
Écrous et boulons M2.5
Assemblée
Le montage est vraiment simple et ne prend presque pas de temps
Avec le côté composant du PCB tourné vers le haut, poussez les deux boulons M2,5 à travers les trous par le bas, puis vissez la première paire d'écrous pour les fixer et servir d'entretoises.
Poussez les trous de montage du ventilateur vers le bas sur les boulons, avec le côté câble du ventilateur vers le bas (comme illustré) et le texte sur le ventilateur vers le haut. Fixez avec deux autres écrous.
Poussez le connecteur JST du ventilateur dans la prise du Fan SHIM.
Logiciel Avec l'aide de la bibliothèque Python, vous pouvez contrôler le ventilateur (marche/arrêt), la LED RVB et l'interrupteur. Vous trouverez également un certain nombre d'exemples illustrant chaque fonctionnalité, ainsi qu'un script pour installer un démon (un programme informatique qui s'exécute en arrière-plan) qui fait fonctionner le ventilateur en mode automatique, le déclenchant ou l'éteignant lorsque le processeur atteint une température seuil, avec une commande manuelle via l'interrupteur tactile.
À l’intérieur du RP2040 se trouve un chargeur de démarrage USB UF2 « ROM permanente ». Cela signifie que lorsque vous souhaitez programmer un nouveau firmware, vous pouvez maintenir enfoncé le bouton BOOTSEL tout en le branchant sur USB (ou en abaissant la broche RUN/Reset à la masse) et il apparaîtra comme un lecteur de disque USB, vous pouvez faire glisser le firmware. sur. Les personnes qui utilisent les produits Adafruit trouveront cela très familier : Adafruit utilise cette technique sur toutes ses cartes USB natives. Notez simplement que vous ne double-cliquez pas sur réinitialiser, mais maintenez BOOTSEL pendant le démarrage pour accéder au chargeur de démarrage !
Le RP2040 est une puce puissante, dotée de la vitesse d'horloge de notre M4 (SAMD51) et de deux cœurs équivalents à notre M0 (SAMD21). Puisqu'il s'agit d'une puce M0, elle n'a pas d'unité à virgule flottante ni de support matériel DSP – donc si vous faites quelque chose avec des mathématiques à virgule flottante lourdes, cela sera fait par logiciel et donc pas aussi rapide qu'un M4. Pour de nombreuses autres tâches de calcul, vous obtiendrez des vitesses proches de celles du M4 ! Pour les périphériques, il existe deux contrôleurs I²C, deux contrôleurs SPI et deux UART multiplexés sur le GPIO – vérifiez le brochage pour savoir quelles broches peuvent être définies sur lesquelles. Il y a 16 canaux PWM, chaque broche a un canal sur lequel elle peut être réglée (idem sur le brochage).
Spécifications techniques
Mesure 2,0 x 0,9 x 0,28' (50,8 x 22,8 x 7 mm) sans embases soudées
Léger comme une (grosse ?) plume – 5 grammes
RP2040 double cœur Cortex M0+ 32 bits fonctionnant à ~ 125 MHz à une logique et une alimentation de 3,3 V
264 Ko de RAM
Puce SPI FLASH de 8 Mo pour le stockage de fichiers et le stockage de code CircuitPython/MicroPython. Pas d'EEPROM
Des tonnes de GPIO ! 21 x broches GPIO avec les capacités suivantes :
Quatre ADC 12 bits (un de plus que Pico)
Deux périphériques I²C, deux SPI et deux UART, dont un est étiqueté pour l'interface « principale » dans les emplacements Feather standard
16 x sorties PWM - pour servos, LED, etc.
Les 8 GPIO numériques « non-ADC/non-périphérique » sont consécutifs pour une compatibilité PIO maximale
Chargeur lipoly 200 mA+ intégré avec indicateur d'état de charge LED
Broche n° 13 LED rouge pour un usage général clignotant
RVB NeoPixel pour une indication en couleur.
Connecteur STEMMA QT intégré qui vous permet de connecter rapidement n'importe quel appareil Qwiic, STEMMA QT ou Grove I²C sans soudure !
Bouton de réinitialisation et bouton de sélection du chargeur de démarrage pour des redémarrages rapides (pas de débranchement-rebranchement pour relancer le code)
Broche d'alimentation/activation 3,3 V
Le port de débogage SWD en option peut être soudé pour l'accès au débogage
4 trous de montage
Cristal de 24 MHz pour un timing parfait.
Régulateur 3,3 V avec sortie de courant de crête de 500 mA
Le connecteur USB Type C vous permet d'accéder au chargeur de démarrage USB ROM intégré et au débogage du port série
Caractéristiques de la puce RP2040
Double ARM Cortex-M0+ à 133 MHz
264 Ko de SRAM sur puce dans six banques indépendantes
Prise en charge jusqu'à 16 Mo de mémoire Flash hors puce via un bus QSPI dédié
Contrôleur DMA
Barre transversale AHB entièrement connectée
Périphériques d'interpolateur et de diviseur d'entiers
LDO programmable sur puce pour générer une tension de base
2 PLL sur puce pour générer des horloges USB et principales
30 broches GPIO, dont 4 pouvant être utilisées comme entrées analogiques
Périphériques
2 UART
2 contrôleurs SPI
2 contrôleurs I²C
16 canaux PWM
Contrôleur USB 1.1 et PHY, avec prise en charge des hôtes et des périphériques
8 machines à états PIO
Livré entièrement assemblé et testé, avec le chargeur de démarrage USB UF2. Adafruit ajoute également un en-tête, vous pouvez donc le souder et le brancher sur une planche à pain sans soudure.
Le Raspberry Pi Pico 2 H (avec connecteurs) est une nouvelle carte microcontrôleur de la Raspberry Pi Foundation, basée sur le RP2350. Il présente une vitesse d'horloge de cœur plus élevée, le double de la SRAM sur puce, le double de la mémoire flash intégrée, des cœurs Arm plus puissants, des cœurs RISC-V en option, de nouvelles fonctionnalités de sécurité et des capacités d'interface améliorées. Le Raspberry Pi Pico 2 H offre une amélioration significative des performances et des fonctionnalités tout en conservant la compatibilité matérielle et logicielle avec les membres précédents de la série Raspberry Pi Pico.
Le RP2350 fournit une architecture de sécurité complète construite autour d'Arm TrustZone pour Cortex-M. Il intègre un démarrage signé, 8 Ko d'OTP antifusible pour le stockage des clés, une accélération SHA-256, un TRNG matériel et des détecteurs de problèmes rapides.
La capacité unique à double cœur et à double architecture du RP2350 permet aux utilisateurs de choisir entre une paire de cœurs Arm Cortex-M33 standard et une paire de cœurs Hazard3 RISC-V à matériel ouvert. Programmable en C/C++ et Python, et pris en charge par une documentation détaillée, le Raspberry Pi Pico 2 est la carte microcontrôleur idéale pour les passionnés et les développeurs professionnels.
Spécifications
Processeur
Processeurs Dual Arm Cortex-M33 ou double RISC-V Hazard3 à 150 MHz
Mémoire
520 Ko de SRAM sur puce ; Flash QSPI intégré de 4 Mo
Interfaces
26 broches GPIO polyvalentes, dont 4 pouvant être utilisées pour AD
Périphériques
2x UART
2x Contrôleurs SPI
2x Contrôleurs I²C
24x Canaux PWM
1x Contrôleur USB 1.1 et PHY, avec prise en charge des hôtes et des périphériques
12x Machines à états PIO
Puissance d'entrée
1,8-5,5 V CC
Dimensions
21 x 51 mm
Téléchargements
Datasheet (Pico 2)
Datasheet (RP2350)
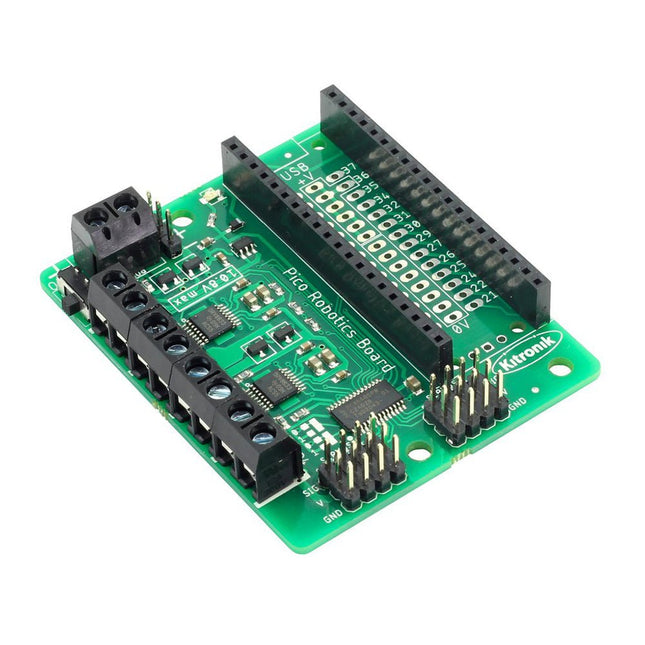
La carte robotique comprend 2 circuits intégrés de pilote de moteur à double pont en H. Ceux-ci sont capables de piloter 2 moteurs standard ou 1 moteur pas à pas chacun, avec un contrôle complet de marche avant, arrière et d'arrêt. Il existe également 8 sorties servo, capables de piloter des servos à rotation standard et continue. Ils peuvent tous être contrôlés par le Pico à l'aide du protocole I²C, via un circuit intégré pilote à 16 canaux. La sortie IO fournit des connexions à toutes les broches inutilisées du Pico. Les 27 broches d'E/S disponibles permettent d'ajouter d'autres appareils, tels que des capteurs ou des LED ZIP, à la carte. L'alimentation est fournie via un bornier ou un connecteur de type servo. L'alimentation est ensuite contrôlée par un interrupteur marche/arrêt sur la carte et il y a également une LED verte pour indiquer quand la carte est alimentée. La carte produit ensuite une alimentation régulée de 3,3 V qui est introduite dans les connexions 3 V et GND pour alimenter le Pico connecté. Cela supprime le besoin d’alimenter le Pico séparément. Les broches 3 V et GND sont également réparties sur le connecteur, ce qui signifie que des appareils externes peuvent également être alimentés.
Pour utiliser la carte robotique, le Pico doit être fermement inséré dans la prise à broches à double rangée de la carte. Assurez-vous que le Pico est inséré avec le connecteur USB à la même extrémité que les connecteurs d'alimentation de la carte robotique. Cela permettra d'accéder à toutes les fonctions de la carte et chaque broche est éclatée.
Caractéristiques
Une carte compacte mais riche en fonctionnalités conçue pour être au cœur de vos projets robotiques Raspberry Pi Pico.
La carte peut piloter 4 moteurs (ou 2 moteurs pas à pas) et 8 servos, avec un contrôle complet avant, arrière et arrêt.
Il dispose également de 27 autres points d'extension d'E/S et de connexions d'alimentation et de masse.
Les lignes de communication I²C sont également éclatées permettant de contrôler d'autres appareils compatibles I²C.
Cette carte dispose également d'un interrupteur marche/arrêt et d'un voyant d'état d'alimentation.
Alimentez la carte via un bornier ou un connecteur de type servo.
Les broches 3V et GND sont également réparties sur l'en-tête Link, permettant d'alimenter des périphériques externes.
Codez-le avec MicroPython ou via un éditeur tel que l'éditeur Thonny .
1 x carte robotique compacte Kitronik pour Raspberry Pi Pico
Dimensions : 68 x 56 x 10 mm
Exigences
Carte Raspberry Pi Pico
Raspberry Pi Pico Wireless Pack se fixe à l'arrière de votre Pico et utilise une puce ESP32 pour permettre à votre Pico de se connecter aux réseaux sans fil 2,4 GHz et de transférer des données. Il existe un emplacement pour carte microSD si vous souhaitez stocker beaucoup de données localement, ainsi qu'une LED RVB (pour les mises à jour d'état) et un bouton (utile pour des choses comme activer/désactiver le Wi-Fi).
Idéal pour adapter rapidement un projet Pico existant afin d'avoir une fonctionnalité sans fil, le Raspberry Pi Pico Wireless Pack serait utile pour envoyer des données de capteurs dans des systèmes domotiques ou des tableaux de bord, pour héberger une page Web à partir d'une boîte d'allumettes ou pour permettre à votre Pico d'interagir avec des API en ligne. .
Caractéristiques
Module ESP32-WROOM-32E pour connectivité sans fil (connecté via SPI) ( fiche technique )
1x bouton tactile
LED RVB
Emplacement pour carte Micro SD
Connecteurs femelles pré-soudés pour fixer votre Raspberry Pi Pico
Entièrement assemblé
Aucune soudure requise (tant que votre Pico est équipé de broches d'en-tête attachées)
Compatible avec Raspberry Pi Pico
Dimensions : environ 53 x 25 x 11 mm (L x L x H, y compris les en-têtes et les composants)
Bibliothèques C++ et MicroPython
Utilisez votre Raspberry Pi avec la communication LTE Cat-4 4G/3G/2G et le positionnement GNSS, pour transmission de données à distance/téléphone/SMS, adapté à la surveillance/alarme de zones éloignées. Ce HAT 4G est basé sur le Maduino Zero 4G LTE, mais sans contrôleur. Il est conçu pour fonctionner avec une Raspberry Pi (connecteur 2 x 20 et USB). La Raspberry communique avec ce HAT avec des commandes AT simples (via les broches TX/RX du connecteur 2 X 20) pour des contrôles simples, tels que SMS/Phone/GNSS ; avec la connexion USB et le pilote Linux approprié installé, le HAT 4G agit comme un adaptateur réseau 4G, qui peut accéder à Internet et transmettre des données avec le protocole 4G. Comparé au dongle USB 4G normal, ce HAT 4G pour Raspberry Pi présente les avantages suivants : Codec audio intégré, qui vous permet d'avoir un appel directement avec votre RPI, ou une diffusion automatique avec un haut-parleur ; Communication UART matérielle, contrôle matériel de l'alimentation (par impulsion de 2 s du GPIO PI ou du bouton POWERKEY), contrôle matériel du mode avion ; Double antenne LTE 4G, plus antenne GPS Caractéristiques LTE Cat-4, avec un débit de liaison montante de 50 Mbps et un débit de liaison descendante de 150 Mbps Positionnement GNSS Pilote audio NAU8810 Prend en charge dial-up, phone, SMS, TCP, UDP, DTMF, HTTP, FTP, etc... Prend en charge GPS, BeiDou, Glonass, Positionnement des stations de base LBS Emplacement pour carte SIM, prend en charge les cartes SIM 1.8 V/3 V Entrée audio intégrée et décodeur audio pour passer un appel téléphonique. 2 indicateurs LED, permettant de surveiller facilement l’état de fonctionnement Prend en charge la boîte à outils d'application SIM : SAT Classe 3, GSM 11.14 Release 99, USAT Inclus 1 Hat 4G LTE pour Raspberry Pi 1 antenne GPS 2 antennes 4G LTE/li> 2 Standoff Téléchargement GitHub
Un jeu de mâchoires amélioré qui résiste au contact direct avec un fer à souder
Les mâchoires d'étau en PTFE haute température Stickvise résisteront au contact accidentel avec un fer à souder et ne fondront pas. Il s'agit d'une excellente mise à niveau pour votre Stickvise.
Caractéristiques
Fabriqué en PTFE avec un point de fusion extrêmement élevé
Résiste au contact accidentel avec un fer à souder
Il s'agit uniquement des plaques de mâchoire, n'inclut pas de Stickvise
Spécifications
Matériel
Aluminium
Dimensions
73 x 53 x 3 mm
Poids
21 g
L'ESP32-WROOM-32, mesurant uniquement 25,2 mm x 18 mm, contient le SoC ESP32, une mémoire flash, des composants discrets de précision et une antenne PCB pour offrir des performances RF exceptionnelles dans les applications limitées en espace.
ESP32-WROOM-32 est un puissant module MCU Wi-Fi + BT + BLE générique qui cible une grande variété d'applications, allant des réseaux de capteurs basse consommation aux tâches les plus exigeantes, telles que l'encodage vocal, le streaming de musique et le décodage MP3.
Au cœur de ce module se trouve la puce ESP32-D0WDQ6. La puce intégrée est conçue pour être évolutive et adaptative. Il existe deux cœurs de processeur qui peuvent être contrôlés individuellement et la fréquence d'horloge est réglable de 80 MHz à 240 MHz. L'utilisateur peut également éteindre le processeur et utiliser le coprocesseur basse consommation pour surveiller en permanence les périphériques en cas de changement ou de franchissement de seuils. L'ESP32 intègre un riche ensemble de périphériques, allant des capteurs tactiles capacitifs aux capteurs Hall, en passant par l'interface de carte SD, Ethernet, SPI haut débit, UART, I²S et I²C.
L'intégration de Bluetooth, Bluetooth LE et Wi-Fi garantit qu'un large éventail d'applications peut être ciblée et que le module est à l'épreuve du temps. L'utilisation du Wi-Fi permet une vaste portée physique et une connexion directe à Internet via un routeur Wi-Fi, tandis que l'utilisation du Bluetooth permet à l'utilisateur de se connecter facilement au téléphone ou de diffuser des balises à faible consommation d'énergie pour sa détection.
Le courant de veille de la puce ESP32 est inférieur à 5 µA, ce qui la rend adaptée aux applications électroniques alimentées par batterie et portables. L'ESP32 prend en charge un débit de données allant jusqu'à 150 Mbps et une puissance de sortie de 20,5 dBm au niveau de l'antenne pour garantir la plage physique la plus large. En tant que telle, la puce offre des spécifications de pointe et les meilleures performances en termes d'intégration électronique, de portée, de consommation d'énergie et de connectivité.
Téléchargements
Datasheet
Votre maison est hantée ? Of, beter gezegd, ben je ervan overtuigd dat het spookt in je huis, maar heb je het nooit kunnen bewijzen omdat je nooit een camera hebt gehad die geïntegreerd is met je Raspberry Pi Zero, maar toch klein genoeg is om de spoken niet op te Marques?
Heureusement, la caméra espion pour Raspberry Pi Zero est plus petite qu'une vignette avec une résolution suffisamment élevée pour voir des personnes, des fantômes ou tout ce que vous recherchez. Il a à peu près la taille d'une caméra de téléphone portable - le module ne mesure que 8,6 x 8,6 mm - avec seulement un câble de 2', vous pouvez donc créer une petite caméra espion extra compacte et sournoise. Il a un angle d'ouverture de 160 degrés pour un effet fisheye très large/déformé, idéal pour les systèmes de sécurité ou pour visualiser une grande zone du salon ou de la route. Comme la carte caméra Raspberry Pi, elle se connecte à votre Raspberry Pi Zero v1.3 ou Zero W via la petite connexion située sur le bord de la carte à proximité de la connexion « PWR in ». Cette interface utilise l'interface CSI spéciale, spécialement conçue pour l'interface avec les caméras. Le bus CSI peut gérer des débits de données extrêmement élevés et ne transporte que des données de pixels.
La caméra est connectée au processeur BCM2835 du RPi via le bus CSI, une connexion à bande passante plus élevée qui renvoie les données de pixels de la caméra au processeur. Ce bus passe par le câble ruban qui relie la carte caméra au Pi. Les câbles plats sont compatibles avec le RPi Zero v1.3 et le RPi Zero W.
Le capteur lui-même a une résolution native de 5 mégapixels et intègre un objectif à mise au point fixe. Elle a des spécifications similaires à celles de la caméra RPi d'origine, mais n'est pas aussi haute résolution que la nouvelle caméra RPi v2 !
Caractéristiques
Dimensions du module caméra : 8,6 x 8,6 mm
Diamètre de la lentille : 10 mm
Longueur totale : 60 mm
Angle d'ouverture de l'objectif : 160 degrés
Poids : 1,9 g