Résultats de la recherche pour "cytron OR 25amp OR 7 OR 58 OR v OR high OR voltage OR dc OR motor OR driver"
-
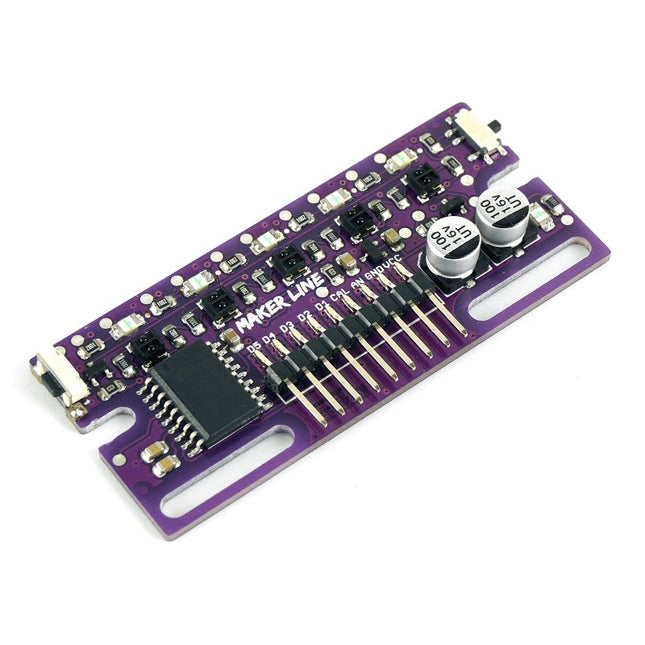
Cytron Capteur de ligne Cytron Maker
Maker Line est un capteur de ligne doté d'un réseau de 5 capteurs IR capable de suivre des lignes de 13 mm à 30 mm de largeur. L'étalonnage du capteur a également été simplifié. Il n'est pas nécessaire d'ajuster le potentiomètre pour chaque capteur IR. Il vous suffit d'appuyer sur le bouton de calibrage pendant 2 secondes pour accéder au mode de calibrage. Ensuite, vous devez faire glisser les capteurs sur la ligne, appuyer à nouveau sur le bouton et vous êtes prêt à partir. Les données d'étalonnage sont stockées dans l'EEPROM et restent intactes même lorsque le capteur est éteint. L'étalonnage ne doit donc être effectué qu'une seule fois, sauf si la hauteur du capteur, la couleur de la ligne ou la couleur de fond ont changé. Maker Line prend également en charge deux sorties : 5 sorties numériques pour l'état de chaque capteur indépendamment, ce qui est similaire au capteur IR classique, mais vous bénéficiez d'un étalonnage facile, et également une sortie analogique, où la tension représente la position de la ligne. La sortie analogique offre également une résolution plus élevée par rapport aux sorties numériques séparées. Ceci est particulièrement utile lorsqu’une grande précision est requise lors de la construction d’un robot suiveur de ligne avec contrôle PID. Caractéristiques Tension de fonctionnement : compatible DC 3,3 V et 5 V (avec protection contre l'inversion de polarité) Largeur de trait recommandée : 13 mm à 30 mm Couleur de ligne sélectionnable (claire ou foncée) Distance du capteur (hauteur) : 4 mm à 40 mm (Vcc = 5 V, ligne noire sur surface blanche) Taux de rafraîchissement du capteur : 200 Hz Processus d'étalonnage facile Types de sortie double : 5 sorties numériques représentent chaque état du capteur IR, 1 sortie analogique représente la position de la ligne. Prend en charge une large gamme de contrôleurs, tels que Arduino, Raspberry Pi, etc. Téléchargements Fiche de données Tutoriel : Construire un robot de suivi de ligne bon marché
€ 14,95€ 5,98
Membres identique
-

Kitronik Carte de commande de moteur de Kitronik pour Raspberry Pi Pico
Cette carte permet au Raspberry Pi Pico (connecté via un connecteur) de commander deux moteurs simultanément avec un contrôle complet de marche avant, arrière et stop, ce qui la rend idéale pour les projets de buggy contrôlés par le Pico. Elle peut également être utilisée pour alimenter un moteur pas à pas. Elle comporte le circuit intégré de commande de moteur DRV8833, qui dispose d'une protection interne contre les courts-circuits, les surintensités et la chaleur. La carte dispose de 4 connexions externes aux broches GPIO et d'une alimentation 3 V et GND du Pico. Cela permet d'ajouter des options d'E/S supplémentaires pour vos projets de buggy, qui peuvent être lues ou contrôlées par le Pico. En outre, il y a un interrupteur marche/arrêt et une LED d'état d'alimentation, vous permettant de vérifier si la carte est sous tension et d'économiser vos piles lorsque votre projet n'est pas en cours d'utilisation. Pour utiliser la carte de commande de moteur, le Pico doit être doté d'un connecteur soudé et être fermement inséré. La carte fournit une alimentation régulée qui est utilisée par le connecteur à 40 voies pour alimenter le Pico, éliminant ainsi la nécessité d'alimenter le Pico directement. La carte de pilotage du moteur est alimentée soit par des bornes à vis, soit par un connecteur de type servo. Kitronik a développé un module micro-python et un exemple de code pour soutenir l'utilisation de la carte de commande de moteur avec le Pico. Ce code est disponible sur GitHub repo. Caractéristiques Une carte compacte mais dotée de nombreuses fonctionnalités, conçue pour être au cœur de vos projets de robots buggy avec le Raspberry Pi Pico. La carte peut commander 2 moteurs simultanément avec une contrôle complet de la marche avant, arrière et de l'arrêt. Il est équipé du circuit intégré de commande de moteur DRV8833, qui dispose d'une protection intégrée contre les courts-circuits, les surintensités et la température. En plus, la carte comporte un interrupteur marche/arrêt et une LED d'état d'alimentation. Alimentez la carte via un connecteur de type bornier. Les broches 3V et GND sont également sorties, ce qui permet d'alimenter des dispositifs externes. Codez-le avec MicroPython avec un éditeur tel que the Thonny editor. Dimensions: 63 mm (L) x 35 mm (W) x 11.6 mm (H) Téléchargement Fiche technique
€ 15,95€ 7,95
Membres identique
-

iFixit iFixit Manta Driver Kit
Ce kit comprend le plus large assortiment d'embouts iFixit, ainsi que toutes les têtes de tournevis dont vous aurez besoin pour entreprendre tout projet de réparation ou de bricolage. Il comprend des embouts standard comme Phillips et Flathead dans une gamme complète de tailles pour tout gérer, de la réparation électronique de précision aux projets de bricolage à domicile. Et ce ne serait pas un ensemble de bits iFixit s'il n'incluait pas tous les éléments exotiques, des Pentalobes pour la réparation d'iPhone et de MacBook d'Apple aux Gamebits pour vos consoles Nintendo vintage. Tous les jeux d'embouts de nouvelle génération ont été repensés afin de maximiser la commodité et la convivialité. Le couvercle du jeu d'embouts est maintenu en place avec des aimants pour augmenter la durée de vie du produit (plus de charnières ou de fermoirs cassés) et se monte également à l'arrière du boîtier du jeu d'embouts pour le garder à l'écart pendant que vous faites votre travail. Si vous avez besoin d'aide pour organiser vos vis et pièces, vous pouvez utiliser le plateau de tri intégré au couvercle. Les embouts de 4 mm ont été ajustés et ont désormais un col plus long pour une portée plus profonde et plus précise. La boîte à outils comprend Étui aimanté facile à ouvrir Membre avec plateau de tri intégré Tournevis en aluminium de 4 mm Tourne-embout en aluminium 1/4' Embouts de tournevis de 4 mm Phillips - 000, 00, 0 Tête plate - 1, 1,5, 2, 2,5, 3, 3,5 mm Torx-T2, T3, T4, T5 Sécurité Torx - TR6, TR7, TR8 Pentalobes-P2, P5, P6 JIS-000, 00, 0, 1 Hex - 0,7, 0,9, 1,3, 1,5 mm Sécurité hexagonale - 2, 2,5, 3, 3,5 mm Tripoint - Y000, Y00, Y0, Y1 Tourne-écrou - 2,5, 3, 3,5, 4, 4,5, 5, 5,5 mm Mors de jeu - 3,8, 4,5 mm Tendeur - 4, 6 Triangles - 2, 2,2, 2,6, 3 mm Mors ovale Embout d'espacement pour iPhone Bit d'éjection Sim Embout de ramassage magnétique Embouts de tournevis 1/4' Phillips - 1, 2, 3 Tête plate - 4, 5, 6, 7, 8 mm Sécurité hexagonale - 4, 5, 6, 7, 8 mm Sécurité hexagonale SAE - 1/8, 9/64, 5/32, 3/16, 7/32, 1/4 Pozidriv-PZ0, PZ1, PZ2, PZ3 Jeu de couples - 6, 8, 10 Tendeur - 8, 10, 12 Carré - 0, 1, 2, 3 Cannelure-M5, M6, M8 Sécurité Torx - TR9, TR10, TR15, TR20, TR25, TR27, TR30, TR35, TR40 Tri-aile 1, 2, 3, 4 Embrayage 1, 2, 3 Vanne Schrader Entraînement à crochet Adaptateur 1/4' à 4 mm Pilote 1/4' à douille 1/4' Pilote 1/4' à douille 3/8' Douille 1/4' vers pilote 1/4' Caractéristiques Embout métal : acier 6150 Matériau du pilote : aluminium anodisé Matériau du boîtier: ABS Mousse : EVA
€ 64,41
-

Rigol Rigol DP832 Alimentation CC à 3 canaux (0-30 V, 0-3 A, 195 W)
Spécifications Canaux : 3 Puissance totale : 195 watts Max. Tension : 30 Volts Max. Courant : 3 ampères Faible ondulation et bruit : <350 μVrms/2 mVpp Excellent taux de régulation linéaire et taux de régulation de charge Temps de réponse transitoire rapide : <50 μs Certaines chaînes sont isolées Fonctions de protection standard OVP/OCP/OTP Sortie de synchronisation standard Mesures V, A, W et affichage de forme d'onde intégrés Contrôle indépendant pour chaque canal Écran TFT de 3,5 pouces Inclus 1x Rigol DP832 Alimentation CC 1x Cordon d'alimentation 1x Câble USB
€ 423,68
-

Micsig Micsig CP2100A Sonde de courant CA/CC
Caractéristiques Bandwidth: DC-800 KHz Maximum measurable current: 100 Apk (70.7 Arms) Max. conductor diameter: 13 mm Auto & Manual "Zero" function Directly powered by USB port Standard BNC interface, compatible with any oscilloscope Spécifications Bandwidth DC-800 KHz Rise time <= 583 ns Ranges 10 A / 100 A Output sensitivity 0.1 V/A (10 A) 0.01 V/A (100 A) DC accuracy 3% ±50 mA (10 A) 4% ±50 mA (100 A, 500 mA - 40 Apk) 15% (100 A, 40 Apk -100 Apk) Signal delay < 150 ns (10 A) < 200ns (100 A) Current measurement range 50 mA - 10 Apk (10 A) 1 A - 100 Apk (100 A) Max. Voltage CAT III 300 V CAT II 600 V Power supply DC 5 V Téléchargements Quick Guide Datasheet Manual
€ 307,20
-

UFactory UFactory xArm 7
Ce robot multi-axes équilibre parfaitement puissance et taille. Caractéristiques 6 axes Charge utile : 3,5 kg Portée : 700 mm Répétabilité : 0,1 mm Vitesse maximale 1000 mm/s Applications Entretien des machines Cueillette des bacs Plateforme mobile Automatisation du laboratoire Recherche robotique Des robots collaboratifs durables pour votre automatisation L'entraînement harmonique et les servomoteurs de qualité industrielle garantissent un fonctionnement 24h/24 et 7j/7 sans arrêt. Fabriqué en fibre de carbone, son poids de 15 kg permet un déploiement plus facile. Déploiement flexible avec fonctionnalité sécurisée Enseignement manuel, léger, peu encombrant et facile à redéployer vers plusieurs applications sans modifier votre organisation de production. Parfaitement pour les tâches récurrentes. La détection des collisions est disponible pour tous nos cobots. Votre sécurité est toujours la priorité absolue. Interface graphique pour une programmation conviviale pour les débutants Compatible avec divers systèmes d'exploitation, notamment macOS et Windows. Technologie Web compatible avec tous les principaux navigateurs. Glissez et déposez pour créer votre code en quelques minutes. Un SDK puissant et open source à portée de main Le SDK Python/C++ open source entièrement fonctionnel offre une programmation plus flexible. Les packages ROS/ROS2 sont prêts à l'emploi. Des exemples de codes vous aident à déployer le bras robotique en douceur. Caractéristiques UFactory 850 xArm 5 xArm 6 xArm 7 Charge utile 5 kg 3 kg 5 kg 3,5 kg Atteindre 850 mm 700mm 700mm 700mm Degrés de liberté 6 5 6 7 Répétabilité ±0,02 mm ±0,1mm ±0,1mm ±0,1mm Vitesse maximum 1 m/s 1 m/s 1 m/s 1 m/s Poids (bras du robot uniquement) 20 kg 11,2 kg 12,2 kg 13,7 kg Vitesse maximum 180°/s 180°/s 180°/s 180°/s Articulation 1 ±360° ±360° ±360° ±360° Articulation 2 -132°~132° -118°~120° -118°~120° -118°~120° Articulation 3 -242°~3,5° -225°~11° -225°~11° ±360° Articulation 4 ±360° -97°~180° ±360° -11°~225° Articulation 5 -124°~124° ±360° -97°~180° ±360° Articulation 6 ±360° ±360° -97°~180° Articulation 7 ±360° Matériel Plage de température ambiante 0-50°C Consommation d'énergie Min 8,4 W, typique 200 W, max 400 W Alimentation d'entrée 24 V CC, 16,5 A Empreinte Ø 126 mm Matériaux Aluminium, fibre de carbone Type de connecteur de base M5x5 Salle blanche de classe ISO 5 Montage de robots N'importe lequel Protocole de communication de l'effecteur final Modbus RTU(rs485) E/S de l'effecteur final 2x DI/2x DO/2x AI/1x RS485 Mode de communication Ethernet Inclus 1x bras robotique xArm 5 1x boîtier de commande AC 1x câble d'alimentation du bras robotique 1x câble adaptateur d'effecteur d'extrémité de bras robotique 1x câble de signal pour bras robotique 1x câble d'alimentation du boîtier de commande 1x câble réseau 1x outil de montage 1x Guide de démarrage rapide
€ 14.569,00
Membres identique
-

FNIRSI FNIRSI DPS150 Alimentation CC (150 W)
Le FNIRSI DPS150 est une alimentation CC réglable hautes performances dotée d'une interface d'entrée USB-C et de plusieurs modes d'alimentation, permettant un réglage précis de la tension de sortie (0-30 V) et du courant (0-5 A). Il fournit une sortie efficace, à faible consommation et stable, équipée de plusieurs fonctions de protection de sécurité, notamment les surtensions, les surintensités, les surcharges, la surchauffe et la connexion inversée. Il peut être appliqué de manière flexible à la connexion série de plusieurs appareils, avec un affichage et un fonctionnement riches et conviviaux, une conception compacte et portable, répondant à divers besoins d'application. Caractéristiques Alimentation CC variable de 30 V, 5 A, 150 W avec une précision de 0,01 V, 0,001 A, des modes CC/CV et une ondulation <20 mV pour protéger les composants électroniques sensibles. Prend en charge les entrées PC, QC et DC avec des sorties programmables et 6 paramètres de tension/courant prédéfinis. Compatible avec les fiches bananes de 4 mm, les bornes en forme de U et les fils de cuivre pour divers équipements. 8 mécanismes de sécurité, dont une protection contre les surtensions, les courants, les courts-circuits et la surchauffe. Écran HD IPS de 2,8 pouces avec affichage inversé à 90°, numérique et courbe pour une surveillance facile. Conception compacte et peu encombrante pour utilisation dans les laboratoires, les réparations et les projets de bricolage. Spécifications Tension d'entrée 5~32 V CC Courant d'entrée 100 mA-5 A Tension de sortie 0-30 V Courant de sortie 0~5 A Puissance de sortie 0-150 W Mode d'entrée Chargeur rapide PD Chargeur rapide QC Banque d'alimentation Adaptateurs d'alimentation CC Environnement d'exploitation 0-40°C Régulation de charge 0,49% Efficacité à pleine charge 96,30% Écran 2,8 pouces (320 x 240) Dimensions 106 x 76 x 28 mm Poids 178 g Inclus 1x DPS150 alimentation 2x Fils à pince crocodile (noir et rouge) 1x Câble micro-USB 1x Manuel Téléchargements Manual Firmware V0.0.1
€ 58,51
-
Elektor Digital Power Electronics in Motor Drives (E-book)
This book is for people who want to understand how AC drives (also known as inverter drives) work and how they are used in industry by showing mainly the practical design and application of drives. The key principles of power electronics are described and presented in a simple way, as are the basics of both DC and AC motors. The different parts of an AC drive are explained, together with the theoretical background and the practical design issues such as cooling and protection. An important part of the book gives details of the features and functions often found in AC drives and gives practical advice on how and where to use these. Also described is future drive technology, including a matrix inverter. The mathematics is kept to an essential minimum. Some basic understanding of mechanical and electrical theory is presumed, and a basic knowledge of single andthree phase AC systems would be useful. Anyone who uses or installs drives, or is just interested in how these powerful electronic products operate and control modern industry, will find this book fascinating and informative.
€ 29,95
Membres € 23,96
-

FNIRSI FNIRSI DPS150PD Alimentation (150 W)
Le FNIRSI DPS150 est une alimentation CC réglable hautes performances dotée d'une interface d'entrée USB-C et de plusieurs modes d'alimentation, permettant un réglage précis de la tension de sortie (0-30 V) et du courant (0-5 A). Il fournit une sortie efficace, à faible consommation et stable, équipée de plusieurs fonctions de protection de sécurité, notamment les surtensions, les surintensités, les surcharges, la surchauffe et la connexion inversée. Il peut être appliqué de manière flexible à la connexion série de plusieurs appareils, avec un affichage et un fonctionnement riches et conviviaux, une conception compacte et portable, répondant à divers besoins d'application. Caractéristiques Alimentation CC variable de 30 V, 5 A, 150 W avec une précision de 0,01 V, 0,001 A, des modes CC/CV et une ondulation <20 mV pour protéger les composants électroniques sensibles. Prend en charge les entrées PC, QC et DC avec des sorties programmables et 6 paramètres de tension/courant prédéfinis. Compatible avec les fiches bananes de 4 mm, les bornes en forme de U et les fils de cuivre pour divers équipements. 8 mécanismes de sécurité, dont une protection contre les surtensions, les courants, les courts-circuits et la surchauffe. Écran HD IPS de 2,8 pouces avec affichage inversé à 90°, numérique et courbe pour une surveillance facile. Conception compacte et peu encombrante pour utilisation dans les laboratoires, les réparations et les projets de bricolage. Spécifications Tension d'entrée 5~32 V DC Courant d'entrée 100 mA-5 A Tension de sortie 0-30 V Courant de sortie 0~5 A Puissance de sortie 0-150 W Mode d'entrée Chargeur rapide PD Chargeur rapide QC Banque d'alimentation Adaptateurs d'alimentation CC Environnement d'exploitation 0-40°C Régulation de charge 0,49% Efficacité à pleine charge 96,30% Écran 2,8 pouces (320 x 240) Dimensions 106 x 76 x 28 mm Poids 178 g Inclus 1x DPS150 alimentation 2x Fils à pince crocodile (noir et rouge) 1x Câble de chargement C2C PD 1x Adaptateur GaN PD 100 W (UE) 1x Câble micro-USB 1x Manuel Téléchargements Manual Firmware V0.0.1
€ 94,21
-
Elektor Digital Motor Control - Projects with Arduino & Raspberry Pi (E-book)
This book is about DC electric motors and their use in Arduino and Raspberry Pi Zero W based projects. The book includes many tested and working projects where each project has the following sub-headings: Title of the project Description of the project Block diagram Circuit diagram Project assembly Complete program listing of the project Full description of the program The projects in the book cover the standard DC motors, stepper motors, servo motors, and mobile robots. The book is aimed at students, hobbyists, and anyone else interested in developing microcontroller based projects using the Arduino Uno or the Raspberry Pi Zero W. One of the nice features of this book is that it gives complete projects for remote control of a mobile robot from a mobile phone, using the Arduino Uno as well as the Raspberry Pi Zero W development boards. These projects are developed using Wi-Fi as well as the Bluetooth connectivity with the mobile phone. Readers should be able to move a robot forward, reverse, turn left, or turn right by sending simple commands from a mobile phone. Full program listings of all the projects as well as the detailed program descriptions are given in the book. Users should be able to use the projects as they are presented, or modify them to suit to their own needs.
€ 29,95
Membres € 23,96
-

OWON Alimentation CC OWON P4603 (180 W)
Caractéristiques Canal Sortie monocanal Puissance de sortie totale 180W Sortie de canal 0 - 60 V / 0 - 3 A × 1 canal Afficher Écran LCD couleur de 3,7 pouces Dimension 117 mm (L) × 194 mm (H) × 295 mm (P) Poids Environ. 5,8 kg Interface RS232 Caractéristiques Sortie nominale (0 ℃ - 40 ℃) Tension 0 - 60 V Actuel 3 Un Régulation de charge Tension ≤ 0,01 % + 3 mV Actuel ≤ 0,01 % + 3 mA Régulation de puissance Tension ≤ 0,01 % + 3 mV Actuel ≤ 0,01 % + 3 mA Définition de la résolution Tension 1mV Actuel 1mA Résolution de relecture Tension 1mV Actuel 1mA Précision du point de consigne (dans les 12 mois) (25 ℃ ± 5 ℃) Tension ≤ 0,03 % + 10 mV Actuel ≤ 0,1 % + 5 mA Résolution de relecture (25 ℃ ± 5 ℃) Tension ≤ 0,03 % + 10 mV Actuel ≤ 0,1 % + 5 mA Ondulation/bruit (20 Hz - 20 MHz) Tension (Vp-p) ≤ 4 mVcrête-crête Tension (Vrms) ≤ 1 mVrms Courant (rms) ≤ 4 mBras Coefficient de température de sortie (0℃ - 40℃) Tension ≤ 0,03 % + 10 mV Actuel ≤ 0,1 % + 5 mA Coefficient de température de relecture Tension ≤ 0,03 % + 10 mV Actuel ≤ 0,1 % + 5 mA Temps de réponse 100 µs Stockage 5 groupes de dates Température de fonctionnement 0 - 40 ℃
€ 163,21
-

OWON OWON SPS6051 Alimentation CC sans ventilateur (150 W)
L'alimentation CC programmable sans ventilateur OWON SPS6051 (150 W) offre des performances ultra silencieuses et de haute précision avec une précision de 10 mV/1 mA et une dissipation thermique avancée pour une fiabilité à long terme. Doté d'une protection complète, d'une interface USB avec prise en charge SCPI pour le contrôle à distance et d'un écran LCD TFT de 2,8 pouces, c'est le choix idéal pour les laboratoires, les tests électroniques et la recherche. Caractéristiques Conception sans ventilateur : fonctionnement ultra-silencieux, réduisant le bruit de vibration et minimisant les risques de défaillance potentiels associés aux ventilateurs de refroidissement traditionnels. Excellente conception de dissipation thermique : assure une augmentation contrôlée de la température, permettant un fonctionnement à long terme dans des conditions de pleine charge et prolongeant la longévité des composants internes. Conception légère et ultra-mince. Précision de sortie jusqu'à 10 mV/1 mA. Prend en charge l'édition et la sortie de formes d'onde de liste, avec quatre paramètres de raccourci mémoire pour un accès rapide et pratique. Les fonctions de protection intégrées incluent la protection contre les surtensions, les surintensités, les surchauffes et les sous-tensions d'entrée pour une sécurité renforcée. Le circuit de décharge intégré évite les risques de haute tension résiduelle lorsque l'alimentation est coupée. Interface de communication USB avec prise en charge du protocole SCPI, permettant la programmation PC et le contrôle à distance pour une utilisation simplifiée gestion. Écran LCD TFT de 2,8 pouces Spécifications Modèle SPS6051 SPS3081 Sortie nominale (0°C-40°C) Tension 0-61 V 0-31 V Courant 0-5,1 A 0-8,1 A Puissance 150 W 120 W Régulation de charge Tension ≤30 mV Courant ≤20 mA Régulation de puissance Tension ≤30 mV Courant ≤20 mA Définition de la résolution Tension 10 mV Courant 1 mA Résolution de relecture Tension 10 mV Courant 1 mA Précision de réglage (25°C ±5°C) Tension ≤0,05% ±20 mV ≤0,1% ±20 mV Courant ≤0,05% ±20 mA ≤0,2% ±20 mA Précision de relecture (25°C ±5°C) Courant ≤0,05% ±20 mV ≤0,1% ±20 mV Tension ≤0,05% ±20 mV ≤0,2% ±20 mA Ondulation/Bruit Tension ≤30 mVp-p ≤30 mVp-p Tension ≤4 mVrms ≤5 mVrms Courant ≤10 mAp-p ≤30 mAp-p Coefficient de température de sortie (0°C-40°C) Tension 100 ppm/°C Courant 200 ppm/°C Relecture du coefficient de température Tension 100 ppm/°C Courant 200 ppm/°C Temps de réponse (charge nominale de 50 à 100%) ≤1,0 ms Stockage 4 groupes de données Température de fonctionnement 0-40°C Écran Écran LCD couleur de 2,8 pouces Interface USB Dimensions (L x H x P) 82 x 142 x 226 mm Poids 1,8 kg Inclus 1x OWON SPS6051 Alimentation 2x Fils de test 1x Cordon d'alimentation 1x Manuel Téléchargements Datasheet User Manual Programming Manual PC Software
€ 133,20











