Après la mise sous tension, le YDLIDAR G4 commence à tourner et à scanner l'environnement environnant. La distance de numérisation est de 16 m et l'appareil a une vitesse de numérisation de 9 000 fois par seconde.
Il analyse minutieusement son environnement et peut y détecter les plus petits objets. Grâce à son moteur sans balais extrêmement précis et à son disque codeur montés sur roulements, il fonctionne très bien et a une durée de vie allant jusqu'à 500 000 heures de fonctionnement.
Le G4 est une solution peu coûteuse pour les projets nécessitant une détection d'obstacles, un évitement d'obstacles et/ou une localisation et une cartographie simultanées (SLAM). Tous les produits YDLIDAR sont prêts pour ROS.
Caractéristiques
Scanner 2D à 360 degrés
Performances stables, haute précision
Portée de 16 m Forte protection contre les interférences de la lumière ambiante
Entraînement par moteur sans balais, performances stables
Norme de sécurité laser FDA Classe I
Balayage omnidirectionnel à 360 degrés, fréquence de balayage adaptative de 5 à 12 Hz
Technologie optomagnétique
Communication de données sans fil
Vitesse de numérisation de 9 000 Hz
Documentation
Lecteur ROS
Page de téléchargement d'Ydlidar
Dans la section « Téléchargements » ci-dessous, vous trouverez la fiche technique ainsi que les manuels d'utilisation et de développement.
YDLIDAR X4PRO est un télémètre bidimensionnel à 360 degrés. Basé sur le principe de la triangulation, il est équipé d'une optique, d'une électronique et d'une conception algorithmique associées pour atteindre une mesure de distance haute fréquence et haute précision. La structure mécanique tourne à 360 degrés pour produire en continu les informations d'angle ainsi que les données du nuage de points de l'environnement balayé tout en mesurant les distances.
Caractéristiques
Mesure de distance de balayage omnidirectionnel à 360 degrés
Erreur de distance réduite, performances stables et grande précision
Large plage de mesure
Grande résistance aux interférences lumineuses ambiantes
Consommation d'énergie réduite, petite taille et longue durée de vie
Puissance laser conforme aux normes de sécurité laser de Classe I
Vitesse du moteur réglable, fréquence de balayage de 6 à 12 Hz
Mesure de distance rapide, fréquence de mesure allant jusqu'à 5 kHz
Applications
Navigation et évitement d'obstacles pour les robots
Enseignement et recherche ROS pour les robots
Sécurité régionale
Numérisation de l'environnement et reconstruction 3D
Navigation et évitement d'obstacles pour les robots aspirateurs/robots d'apprentissage ROS
Spécifications
Fréquence de mesure
5000 Hz
Fréquence de balayage
6-12 Hz
Distance de mesure
0,12 à 10 m
Angle de balayage
360°
Résolution d'angle
0,43-0,85°
Dimensions
110,6 x 71,1 x 52,3 mm
Téléchargements
Fiche technique
Manuel de l'utilisateur
Manuel de développement
SDK
Outil
ROS
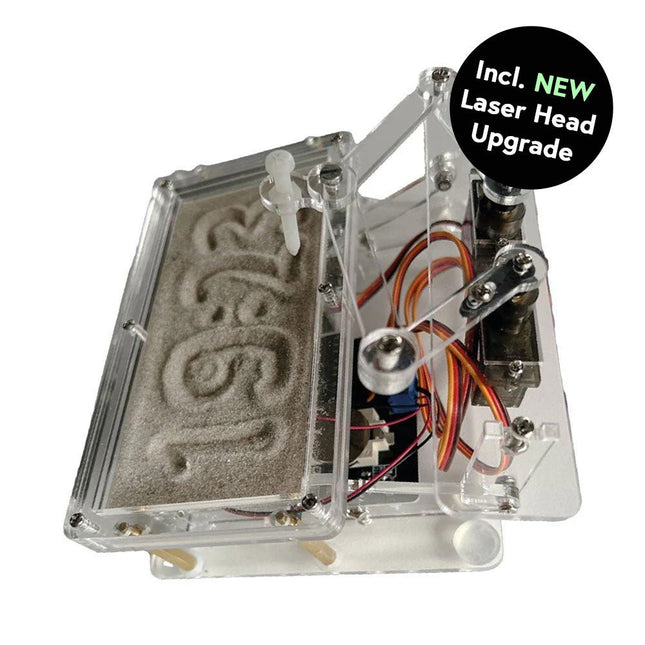
Cette offre groupée contient le populaire horloge de sable Elektor pour Raspberry Pi Pico et la nouvelle upgrade tête laser Elektor, offrant encore plus d'options d'affichage de l'heure. Non seulement vous pouvez « graver » l'heure actuelle dans le sable, mais vous pouvez désormais également l'écrire sur une feuille phosphorescente ou créer des dessins verts.
Contenu de l'offre groupée
Horloge de sable Elektor pour Raspberry Pi Pico (prix normal : 50 €)
NOUVEAU : Upgrade tête laser Elektor pour horloge de sable (prix normal : 35 €)
Horloge de sable Elektor pour Raspberry Pi Pico (Accroche-regard basé sur le Raspberry Pi)
Une horloge à sable standard ne fait qu'indiquer le temps qui passe. En revanche, cette horloge à sable contrôlée par le Raspberry Pi Pico indique l'heure exacte en 'gravant' les quatre chiffres de l'heure et des minutes dans la couche de sable. Après un temps réglable, le sable est aplati par deux moteurs vibrants et tout recommence.
Au cœur de l'horloge de sable se trouvent deux servomoteurs qui entraînent un stylo dans un mécanisme de pantographe. Un troisième servomoteur soulève le stylo de haut en bas. Le bac à sable est équipé de deux moteurs vibrants qui aplatissent le sable. La partie électronique de l'horloge des sables se compose d'un Raspberry Pi Pico et d'une carte RTC/driver avec une horloge en temps réel, ainsi que des circuits de commande pour les servomoteurs.
Un manuel de construction détaillé peut être téléchargé.
Caractéristiques
Dimensions: 135 x 110 x 80 mm
Temps de construction : environ. 1,5 à 2 heures
Inclus
3x Feuilles acryliques prédécoupées avec toutes les pièces mécaniques
3x Mini servomoteurs
2x moteurs de vibration
1x Raspberry Pi Pico
1x Carte RTC/pilote avec les pièces assemblées
Ecrous, boulons, entretoises et fils pour l'assemblage
Sable blanc à grains fins
Upgrade tête laser Elektor pour horloge de sablee
La nouvelle tête laser Elektor transforme l'horloge de sable dans une horloge qui écrit l'heure sur un film qui brille dans le noir au lieu de sable. En plus d’afficher l’heure, il peut également être utilisé pour créer des dessins éphémères. Le pointeur laser de 5 mW, avec une longueur d'onde de 405 nm, produit des dessins vert vif sur le film qui brille dans le noir. Pour de meilleurs résultats, utilisez le kit dans une pièce faiblement éclairée. Attention : ne regardez jamais directement dans le faisceau laser !
Le kit comprend tous les composants nécessaires, mais la soudure de trois fils est nécessaire.
Remarque : Ce kit est également compatible avec l'horloge de sable d'origine basée sur Arduino de 2017. Pour plus de détails, voir Elektor 1-2/2017 et Elektor 1-2/2018.
Caractéristiques
Mesure de la distance par balayage omnidirectionnel à 360°.
Faible erreur de mesure, performances stables et haute précision
Niveau de protection IP65
Forte résistance aux interférences de la lumière ambiante
Moteur sans balais industrielle pour des performances stables.
La puissance du laser est conforme aux normes de sécurité des lasers de classe I
Fréquence de balayage adaptable de 5 à 12 Hz (possibilité de configuration)
Technologie de fusion photomagnétique pour réaliser une communication sans fil et une alimentation électrique sans fil
Fréquence de balayage jusqu'à 20 kHz (possibilité de configuration)
Applications
Navigation des robots et évitement des obstacles.
Automatisation industrielle
Enseignement et recherche sur les robots ROS
Sécurité régionale
Transport intelligent
Analyse environnementale et reconstruction 3D
Robot commercial /Robot aspirateur
Téléchargements
Fiche technique
manuel d'utilisation
Manuel de développement
SDK
TOOL
ROS
Le DiP-Pi PIoT est un système de connectivité WiFi avancé avec des interfaces intégrées de capteurs qui couvrent la plupart des besoins possibles pour les applications IoT basées sur Raspberry Pi Pico. Il peut fournir au système jusqu'à 1,5 A à 4,8 V délivrés de 6 à 18 V CC sur divers schémas d'alimentation comme les voitures, les installations industrielles, etc., en plus du micro-USB d'origine du Raspberry Pi Pico. Il prend en charge la batterie LiPo ou Li-Ion avec chargeur automatique ainsi que la commutation automatique de l'alimentation par câble à l'alimentation par batterie ou inversement (fonctionnalité UPS) en cas de perte d'alimentation par câble. La source d'alimentation étendue (EPR) est protégée par un fusible réinitialisable PPTC, à polarité inversée, ainsi que par ESD. Le DiP-Pi PIoT contient un bouton RESET intégré au Raspberry Pi Pico ainsi qu'un interrupteur coulissant ON/OFF qui agit sur toutes les sources d'alimentation (USB, EPR ou batterie). L'utilisateur peut surveiller (via les broches A/D du Raspberry Pi Pico) le niveau de la batterie et le niveau EPR avec les convertisseurs A/D de PICO. Les deux entrées A/D sont pontées avec des résistances 0402 (0 OHM), donc si pour une raison quelconque l'utilisateur a besoin d'utiliser ces broches Pico pour sa propre application, elles peuvent être facilement retirées. Le chargeur charge automatiquement la batterie connectée (si utilisée), mais l'utilisateur peut en outre allumer/éteindre le chargeur si son application en a besoin.
DiP-Pi PIoT peut être utilisé pour les systèmes IoT alimentés par câble, mais également pour les systèmes purement alimentés par batterie avec ON/OFF. L'état de chaque source d'alimentation est indiqué par des LED informatives distinctes (VBUS, VSYS, VEPR, CHGR, V3V3). L'utilisateur peut utiliser n'importe quelle capacité de type LiPo ou Li-Ion ; Cependant, il faut veiller à utiliser des batteries protégées par PCB avec un courant de décharge maximum autorisé de 2 A. Le chargeur de batterie intégré est configuré pour charger la batterie avec un courant de 240 mA. Ce courant est réglé par une résistance, donc si l'utilisateur a besoin de plus/moins, il peut le changer lui-même. Le DiP-Pi PIoT est également équipé du module WiFi ESP8266 Clone avec antenne intégrée. Cette fonctionnalité ouvre une large gamme d'applications IoT basées sur celle-ci.
En plus de toutes les fonctionnalités ci-dessus, le DiP-Pi PIoT est équipé de capteurs DHT11/22 à 1 fil intégrés et d'interfaces de carte micro-SD. La combinaison des interfaces étendues d'alimentation, de batterie et de capteurs rend le DiP-Pi PIoT idéal pour les applications IoT telles que l'enregistreur de données, la surveillance des usines, la surveillance des réfrigérateurs, etc.
DiP-Pi PIoT est pris en charge avec de nombreux exemples prêts à l'emploi écrits en Micro Python ou C/C++.
Caractéristiques
Général
Dimensions 21 x 51 mm
Compatible avec le brochage Raspberry Pi Pico
LED informatives indépendantes (VBUS, VSYS, VEPR, CHGR, V3V3)
Bouton RESET du Raspberry Pi Pico
Interrupteur à glissière ON/OFF agissant sur toutes les sources d'alimentation (USB, EPR, Batterie)
Alimentation externe 6-18 VDC (voitures, applications industrielles, etc.)
Surveillance du niveau d'alimentation externe (6-18 VCC)
Surveillance du niveau de batterie
Protection contre l'inversion de polarité
Protection par fusible PPTC
Protection ESD
Chargeur de batterie automatique (pour LiPo, Li-Ion protégé par PCB – 2 A Max) Automatique/Contrôle utilisateur
Passage automatique de l'alimentation par câble à l'alimentation par batterie et inversement (fonctionnalité UPS)
Différents schémas d'alimentation peuvent être utilisés simultanément avec l'alimentation USB, l'alimentation externe et l'alimentation par batterie.
Convertisseur Buck 1,5 A à 4,8 V sur EPR
LDO intégré de 3,3 V à 600 mA
Connectivité WiFi clone ESP8266
Commutateur de téléchargement du micrologiciel ESP8266
Interface 1 fil intégrée
Interface DHT-11/22 intégrée
Options d'alimentation
Raspberry Pi Pico micro USB (via VBUS)
Alimentation externe 6-18 V (via prise dédiée – 3,4/1,3 mm)
Batterie externe
Types de batteries pris en charge
LiPo avec PCB de protection courant max 2A
Li-Ion avec PCB de protection courant max 2A
Périphériques et interfaces intégrés
Interface 1 fil intégrée
Interface DHT-11/22 intégrée
Prise pour carte Micro SD
Interface de programmation
Raspberry Pi standard Pico C/C++
Raspberry Pi standard Pico Micro Python
Compatibilité des cas
Boîtier DiP-Pi Plexi-Cut
Surveillance du système
Niveau de batterie via Raspberry Pi Pico ADC0 (GP26)
Niveau EPR via Raspberry Pi Pico ADC1 (GP27)
LED informatives
VB (VUSB)
États-Unis (VSYS)
VE (VEPR)
CH (VCHR)
V3 (V3V3)
Protection du système
Bouton de réinitialisation matérielle instantanée Raspberry Pi Pico
Protection ESD sur EPR
Protection contre l'inversion de polarité sur l'EPR
Fusible PPTC 500 mA @ 18 V sur EPR
Protection contre la surchauffe EPR/LDO
EPR/LDO À propos de la protection actuelle
Conception du système
Conçu et simulé avec PDA Analyzer avec l'un des outils CAO/FAO les plus avancés – Altium Designer
Origine industrielle
Construction de circuits imprimés
PCB de 2 oz en cuivre fabriqué pour une alimentation et un refroidissement appropriés en courant élevé
Technologie de piste de 6 mils/écart de 6 mils PCB à 2 couches
Finition de surface de PCB – Immersion Gold
Tuyaux thermiques en cuivre multicouche pour une réponse thermique accrue du système et un meilleur refroidissement passif
Téléchargements
Fiche de données
Manuel
Le DiP-Pi WiFi Master est un système de connectivité WiFi avancé avec des interfaces intégrées de capteurs qui couvrent la plupart des besoins possibles pour les applications IoT basées sur Raspberry Pi Pico. Il est alimenté directement depuis le Raspberry Pi Pico VBUS. Le DiP-Pi WiFi Master contient un bouton RESET intégré au Raspberry Pi Pico ainsi qu'un interrupteur à glissière ON/OFF qui agit sur les sources d'alimentation du Raspberry Pi Pico.
Le DiP-Pi WiFi Master est équipé d'un module WiFi ESP8266 Clone avec antenne intégrée. Cette fonctionnalité ouvre une large gamme d'applications IoT basées sur celle-ci. En plus de toutes les fonctionnalités ci-dessus, le DiP-Pi WiFi Master est équipé de capteurs DHT11/22 à 1 fil intégrés et d'interfaces de carte micro-SD. La combinaison des interfaces étendues d'alimentation, de batterie et de capteurs rend le DiP-Pi WiFi Master idéal pour les applications IoT telles que l'enregistreur de données, la surveillance des usines, la surveillance des réfrigérateurs, etc.
DiP-Pi WiFi Master est pris en charge avec de nombreux exemples prêts à l'emploi écrits en Micro Python ou C/C++.
Caractéristiques
Général
Dimensions 21 x 51 mm
Compatible avec le brochage Raspberry Pi Pico
LED informatives indépendantes (VBUS, VSYS, V3V3)
Bouton RESET du Raspberry Pi Pico
Interrupteur à glissière ON/OFF agissant sur la source d'alimentation Raspberry Pi Pico
LDO intégré de 3,3 V à 600 mA
Connectivité WiFi clone ESP8266
Commutateur de téléchargement du micrologiciel ESP8266
Interface 1 fil intégrée
Interface DHT-11/22 intégrée
Options d'alimentation
Raspberry Pi Pico micro USB (via VBUS)
Périphériques et interfaces intégrés
Interface 1 fil intégrée
Interface DHT-11/22 intégrée
Prise pour carte Micro SD
Interface de programmation
Raspberry Pi standard Pico C/C++
Raspberry Pi standard Pico Micro Python
Compatibilité des cas
Boîtier DiP-Pi Plexi-Cut
LED informatives
VB (VUSB)
États-Unis (VSYS)
V3 (V3V3)
Protection du système
Bouton de réinitialisation matérielle instantanée Raspberry Pi Pico
Fusible PPTC 500 mA @ 18 V sur EPR
Protection contre la surchauffe EPR/LDO
EPR/LDO À propos de la protection actuelle
Conception du système
Conçu et simulé avec PDA Analyzer avec l'un des outils CAO/FAO les plus avancés – Altium Designer
Origine industrielle
Construction de circuits imprimés
PCB de 2 oz en cuivre fabriqué pour une alimentation et un refroidissement appropriés en courant élevé
Technologie de piste de 6 mils/écart de 6 mils PCB à 2 couches
Finition de surface de PCB – Immersion Gold
Tuyaux thermiques en cuivre multicouche pour une réponse thermique accrue du système et un meilleur refroidissement passif
Téléchargements
Fiche de données
Manuel
Construisez des machines robustes et intelligentes qui combinent la puissance de calcul du Raspberry Pi avec des composants LEGO.
Le Raspberry Pi Build HAT fournit quatre connecteurs pour les moteurs et capteurs LEGO Technic du portefeuille SPIKE. Les capteurs disponibles comprennent un capteur de distance, un capteur de couleur et un capteur de force polyvalent. Les moteurs angulaires sont disponibles dans une gamme de tailles et comprennent des encodeurs intégrés qui peuvent être interrogés pour trouver leur position.
Le Build HAT s'adapte à tous les ordinateurs Raspberry Pi dotés d'un connecteur GPIO à 40 broches, y compris – avec l'ajout d'un câble ruban ou d'un autre périphérique d'extension – le Raspberry Pi 400. Les appareils LEGO Technic connectés peuvent facilement être contrôlés en Python, aux côtés des accessoires Raspberry Pi standard. tel qu'un module de caméra.
Caractéristiques
Contrôle jusqu'à 4 moteurs et capteurs
Alimente le Raspberry Pi (lorsqu'il est utilisé avec un bloc d'alimentation externe approprié)
Facile à utiliser depuis Python sur le Raspberry Pi
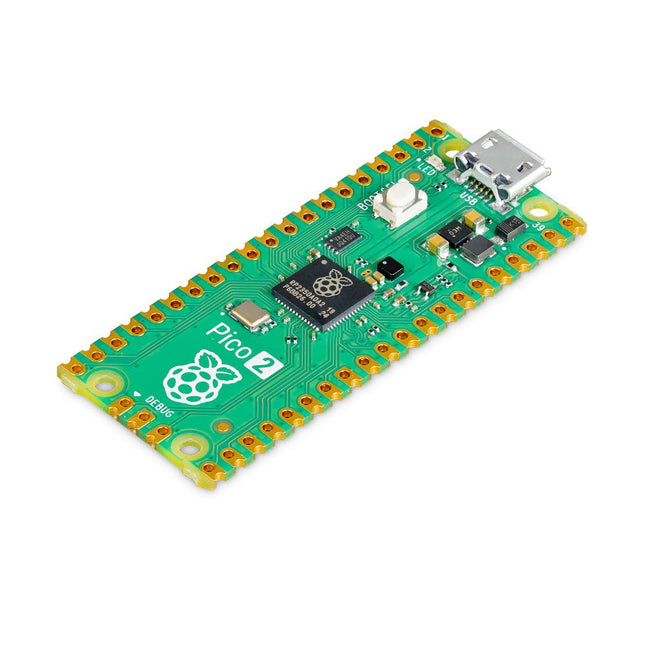
Le Raspberry Pi Pico 2 est une nouvelle carte microcontrôleur de la Raspberry Pi Foundation, basée sur le RP2350. Il présente une vitesse d'horloge de cœur plus élevée, le double de la SRAM sur puce, le double de la mémoire flash intégrée, des cœurs Arm plus puissants, des cœurs RISC-V en option, de nouvelles fonctionnalités de sécurité et des capacités d'interface améliorées. Le Raspberry Pi Pico 2 offre une amélioration significative des performances et des fonctionnalités tout en conservant la compatibilité matérielle et logicielle avec les membres précédents de la série Raspberry Pi Pico.
Le RP2350 fournit une architecture de sécurité complète construite autour d'Arm TrustZone pour Cortex-M. Il intègre un démarrage signé, 8 Ko d'OTP antifusible pour le stockage des clés, une accélération SHA-256, un TRNG matériel et des détecteurs de problèmes rapides.
La capacité unique à double cœur et à double architecture du RP2350 permet aux utilisateurs de choisir entre une paire de cœurs Arm Cortex-M33 standard et une paire de cœurs Hazard3 RISC-V à matériel ouvert. Programmable en C/C++ et Python, et pris en charge par une documentation détaillée, le Raspberry Pi Pico 2 est la carte microcontrôleur idéale pour les passionnés et les développeurs professionnels.
Spécifications
Processeur
Processeurs Dual Arm Cortex-M33 ou double RISC-V Hazard3 à 150 MHz
Mémoire
520 Ko de SRAM sur puce ; Flash QSPI intégré de 4 Mo
Interfaces
26 broches GPIO polyvalentes, dont 4 pouvant être utilisées pour AD
Périphériques
2x UART
2x Contrôleurs SPI
2x Contrôleurs I²C
24x Canaux PWM
1x Contrôleur USB 1.1 et PHY, avec prise en charge des hôtes et des périphériques
12x Machines à états PIO
Puissance d'entrée
1,8-5,5 V CC
Dimensions
21 x 51 mm
Téléchargements
Datasheet (Pico 2)
Datasheet (RP2350)
Le DiP-Pi Power Master est un système d'alimentation avancé avec des interfaces de capteurs intégrées qui couvrent la plupart des besoins possibles pour les applications basées sur Raspberry Pi Pico. Il peut fournir au système jusqu'à 1,5 A à 4,8 V délivrés de 6 à 18 V CC sur divers schémas d'alimentation comme les voitures, les installations industrielles, etc., en plus du micro-USB d'origine du Raspberry Pi Pico. Il prend en charge la batterie LiPo ou Li-Ion avec chargeur automatique ainsi que la commutation automatique de l'alimentation par câble à l'alimentation par batterie ou inversement (fonctionnalité UPS) en cas de perte d'alimentation par câble. La source d'alimentation étendue (EPR) est protégée par un fusible réinitialisable PPTC, à polarité inversée, ainsi que par ESD. Le DiP-Pi Power Master contient un bouton RESET intégré au Raspberry Pi Pico ainsi qu'un interrupteur coulissant ON/OFF qui agit sur toutes les sources d'alimentation (USB, EPR ou batterie). L'utilisateur peut surveiller (via les broches A/D du Raspberry Pi Pico) le niveau de la batterie et le niveau EPR avec les convertisseurs A/D de PICO. Les deux entrées A/D sont pontées avec des résistances 0402 (0 OHM), donc si pour une raison quelconque l'utilisateur a besoin d'utiliser ces broches Pico pour sa propre application, elles peuvent être facilement retirées. Le chargeur charge automatiquement la batterie connectée (si utilisée), mais l'utilisateur peut en outre allumer/éteindre le chargeur si son application en a besoin. DiP-Pi Power Master peut être utilisé pour les systèmes alimentés par câble, mais également pour les systèmes purement alimentés par batterie avec ON/OFF. L'état de chaque source d'alimentation est indiqué par des LED informatives distinctes (VBUS, VSYS, VEPR, CHGR, V3V3). L'utilisateur peut utiliser n'importe quelle capacité de type LiPo ou Li-Ion ; Cependant, il faut veiller à utiliser des batteries protégées par PCB avec un courant de décharge maximum autorisé de 2 A. Le chargeur de batterie intégré est configuré pour charger la batterie avec un courant de 240 mA. Ce courant est réglé par une résistance, donc si l'utilisateur a besoin de plus/moins, il peut le changer lui-même.
En plus de toutes les fonctionnalités ci-dessus, le DiP-Pi Power Master est équipé d'interfaces de capteurs 1 fil et DHT11/22 intégrées. La combinaison des interfaces étendues d'alimentation, de batterie et de capteurs rend le DiP-Pi Power Master idéal pour les applications telles que l'enregistreur de données, la surveillance des usines, la surveillance des réfrigérateurs, etc.
DiP-Pi Power Master est pris en charge avec de nombreux exemples prêts à l'emploi écrits en Micro Python ou C/C++.
Caractéristiques
Général
Dimensions 21 x 51 mm
Compatible avec le brochage Raspberry Pi Pico
LED informatives indépendantes (VBUS, VSYS, VEPR, CHGR, V3V3)
Bouton RESET du Raspberry Pi Pico
Interrupteur à glissière ON/OFF agissant sur toutes les sources d'alimentation (USB, EPR, Batterie)
Alimentation externe 6-18 V DC (voitures, applications industrielles, etc.)
Surveillance du niveau d'alimentation externe (6-18 VCC)
Surveillance du niveau de batterie
Protection contre l'inversion de polarité
Protection par fusible PPTC
Protection ESD
Chargeur de batterie automatique (pour LiPo, Li-Ion protégé par PCB – 2 A Max) Automatique/Contrôle utilisateur
Passage automatique de l'alimentation par câble à l'alimentation par batterie et inversement (fonctionnalité UPS)
Différents schémas d'alimentation peuvent être utilisés simultanément avec l'alimentation USB, l'alimentation externe et l'alimentation par batterie.
Convertisseur Buck 1,5 A à 4,8 V sur EPR
LDO intégré de 3,3 V à 600 mA
Interface 1 fil intégrée
Interface DHT-11/22 intégrée
Options d'alimentation
Raspberry Pi Pico micro USB (via VBUS)
Alimentation externe 6-18 V (via prise dédiée – 3,4/1,3 mm)
Batterie externe
Types de batteries pris en charge
LiPo avec PCB de protection courant max 2A
Li-Ion avec PCB de protection courant max 2A
Périphériques et interfaces intégrés
Interface 1 fil intégrée
Interface DHT-11/22 intégrée
Interface de programmation
Raspberry Pi standard Pico C/C++
Raspberry Pi standard Pico Micro Python
Compatibilité des cas
Boîtier DiP-Pi Plexi-Cut
Surveillance du système
Niveau de batterie via Raspberry Pi Pico ADC0 (GP26)
Niveau EPR via Raspberry Pi Pico ADC1 (GP27)
LED informatives
VB (VUSB)
États-Unis (VSYS)
VE (VEPR)
CH (VCHR)
V3 (V3V3)
Protection du système
Bouton de réinitialisation matérielle instantanée Raspberry Pi Pico
Protection ESD sur EPR
Protection contre l'inversion de polarité sur l'EPR
Fusible PPTC 500 mA @ 18 V sur EPR
Protection contre la surchauffe EPR/LDO
EPR/LDO À propos de la protection actuelle
Conception du système
Conçu et simulé avec PDA Analyzer avec l'un des outils CAO/FAO les plus avancés – Altium Designer
Origine industrielle
Construction de circuits imprimés
PCB de 2 oz en cuivre fabriqué pour une alimentation et un refroidissement appropriés en courant élevé
Technologie de piste de 6 mils/écart de 6 mils PCB à 2 couches
Finition de surface de PCB – Immersion Gold
Tuyaux thermiques en cuivre multicouche pour une réponse thermique accrue du système et un meilleur refroidissement passif
Téléchargements
Fiche de données
Fiche de données
Raspberry Pi Pico W est une carte microcontrôleur basée sur la puce microcontrôleur Raspberry Pi RP2040.
La puce microcontrôleur RP2040 (Raspberry Silicon) offre un processeur ARM Cortex-M0+ à double cœur (133 MHz), 256 Ko de RAM, 30 broches GPIO et de nombreuses autres options d'interface. En outre, il y a 2 Mo de mémoire flash QSPI embarquée pour le stockage du code et des données.
Raspberry Pi Pico W a été conçu pour être une plateforme de développement flexible et peu coûteuse pour RP2040 avec une interface sans fil de 2,4 GHz utilisant un Infineon CYW43439. L'interface sans fil est connectée via SPI au RP2040.
Caractéristiques du Pico W
Microcontrôleur RP2040 avec 2 Mo de mémoire flash
Interfaces sans fil monobande 2,4 GHz intégrées (802.11n)
Port Micro USB-B pour l'alimentation et les données (et pour la reprogrammation de la flash)
Carte DIP à 40 contacts de 21 x 51 mm, d'une épaisseur de 1 mm, avec broches espacées de 0,1' et avec bords canelés.
Expose 26 E/S multifonctions 3,3 V à usage général (GPIO)
23 GPIO sont uniquement numériques, trois entrées analogiques.
Peut être monté en surface comme un module
Port de débogage série (SWD) ARM à 3 connecteurs
Architecture d'alimentation simple mais très flexible
Diverses options permettant d'alimenter facilement l'unité à partir d'un micro USB, d'une alimentation externe ou d'une batterie.
Haute qualité, faible coût, haute disponibilité
SDK complet, exemples de logiciels et documentation
Caractéristiques du microcontrôleur RP2040
Cortex-M0+ à double cœur jusqu'à 133 MHz
La PLL intégrée permet de faire varier la fréquence du cœur
SRAM haute performance multi-bancs de 264 Ko
Flash Quad-SPI externe avec eXecute In Place (XIP) et cache sur puce de 16 Ko
Bus multiplexeur haute performance
USB1.1 intégré (périphérique ou hôte)
30 E/S multifonctions à usage général (quatre peuvent être utilisées pour le CAN)
Tension d'E/S de 1,8-3,3 V
Convertisseur analogique-numérique (CAN) 12 bits 500 ksps
Divers périphériques numériques
2x UART, 2x I²C, 2x SPI, 16x canaux PWM
1x minuterie avec 4 alarmes, 1x horloge en temps réel
2x blocs d'E/S programmables (PIO), 8 machines d'état au total
E/S haute vitesse flexibles et programmables par l'utilisateur
Peut émuler des interfaces telles que la carte SD et VGA
Note : la tension des E/S du Raspberry Pi Pico W est fixée à 3,3 V.
Téléchargements
Fiche technique
Spécifications du connecteur de débogage à 3 contacts
La plateforme ROS la plus populaire au monde
TurtleBot est le robot open source le plus populaire pour l'éducation et la recherche. La nouvelle génération de TurtleBot3 est un petit robot mobile, peu coûteux, entièrement programmable et basé sur ROS. Il est destiné à être utilisé pour l'éducation, la recherche, les loisirs et le prototypage de produits.
Coût abordable
TurtleBot a été développé pour répondre aux besoins économiques des écoles, des laboratoires et des entreprises. TurtleBot3 est le robot le plus abordable parmi les robots mobiles SLAM équipés d'un capteur de distance laser 360° LDS-01.
Norme ROS
La marque TurtleBot est gérée par Open Robotics, qui développe et maintient ROS. Aujourd'hui, ROS est devenu la plateforme de référence pour tous les roboticiens du monde. TurtleBot peut être intégré à des composants robotiques existants basés sur ROS, mais TurtleBot3 peut être une plateforme abordable pour ceux qui veulent commencer à apprendre ROS.
Extensibilité
TurtleBot3 encourage les utilisateurs à personnaliser sa structure mécanique à l'aide d'options alternatives : carte embarquée open source (en tant que carte de contrôle), ordinateur et capteurs. TurtleBot3 Waffle Pi est une plate-forme à deux roues à entraînement différentiel, mais sa structure et sa mécanique peuvent être personnalisées de nombreuses façons : voitures, vélos, remorques, etc. Développez vos idées au-delà de l'imagination avec différents SBC, capteurs et moteurs sur une structure évolutive.
Actionneur modulaire pour robot mobile
TurtleBot3 est capable d'obtenir des données spatiales précises en utilisant 2 DYNAMIXEL dans les articulations des roues. Les DYNAMIXEL de la série XM peuvent être utilisés selon l'un des 6 modes de fonctionnement (série XL : 4 modes de fonctionnement) : Mode de contrôle de la vitesse pour les roues, mode de contrôle du couple ou mode de contrôle de la position pour les articulations, etc. DYNAMIXEL peut même être utilisé pour fabriquer un manipulateur mobile qui est léger mais qui peut être contrôlé avec précision grâce au contrôle de la vitesse, du couple et de la position. DYNAMIXEL est un composant c?ur qui rend TurtleBot3 parfait. Il est facile à assembler, à entretenir, à remplacer et à reconfigurer.
Carte de contrôle ouverte pour ROS
La carte de contrôle est open-source au niveau du matériel et du logiciel pour la communication ROS. La carte de contrôle OpenCR1.0 est suffisamment puissante pour contrôler non seulement les capteurs DYNAMIXEL mais aussi les capteurs ROBOTIS qui sont fréquemment utilisés pour des tâches de reconnaissance de base de manière rentable. Différents capteurs tels que les capteurs tactiles, les capteurs infrarouges, les capteurs de couleur et bien d'autres sont disponibles. L'OpenCR1.0 possède un capteur IMU à l'intérieur de la carte afin d'améliorer la précision du contrôle pour d'innombrables applications. La carte dispose d'alimentations de 3,3 V, 5 V et 12 V pour renforcer les gammes d'appareils informatiques disponibles.
Source ouverte
Le matériel, le micrologiciel et le logiciel de TurtleBot3 sont des logiciels libres, ce qui signifie que les utilisateurs sont invités à télécharger, modifier et partager les codes sources. Tous les composants de TurtleBot3 sont fabriqués en plastique moulé par injection afin de réduire les coûts, mais les données de CAO 3D sont également disponibles pour l'impression 3D.
Spécifications
Vitesse de translation maximale
0.26 m/s
Vitesse de rotation maximale
1.82 rad/s (104.27 deg/s)
Charge utile maximale
30 kg
Taille (L x L x H)
281 x 306 x 141 mm
Poids (+ SBC + batterie + capteurs)
1.8 kg
Seuil de montée
Max 10 mm
Durée d'utilisation prévue
2 h
Temps de charge prévu
2 h 30 m
SBC (ordinateur à carte unique)
Raspberry Pi 4 (2 Go RAM)
MCU
32-bit ARM Cortex-M7 with FPU (216 MHz, 462 DMIPS)
Contrôleur à distance
RC-100B + BT-410 Set (Bluetooth 4, BLE)
Actionneur
XL430-W210
LDS (capteur de distance laser)
360 Laser Distance Sensor LDS-01 or LDS-02
Caméra
Raspberry Pi Camera Module v2.1
IMU
Gyroscope 3 axesAccelerometer 3 axes
Connecteurs d'alimentation
3.3 V/800 mA5 V/4 A12 V/1 A
Connecteurs d'extension
GPIO 18 brochesArduino 32 broches
Périphériques
3x UART, 1x bus CAN, 1x SPI, 1x I²C, 5x CAN, 4x 5-pin OLLO
Ports DYNAMIXEL
3x RS485, 3x TTL
Audio
Plusieurs séquences programmables
LED programmables
4x User LED
LED d'état
1x Board status LED1x Arduino LED1x Power LED
Boutons et interrupteurs
2x boutton poussoir, 1x bouton Reset, 2x DIPswitch
Batterie
Lithium polymer 11.1 V 1800 mAh / 19.98 Wh 5C
Connexion PC
USB
Mise à jour du micrologiciel
par USB / par JTAG
Adaptateur d'alimentation (SMPS)
Entrée: 100-240 VCA 50/60 Hz, 1.5 A @maxSortie: 12 VCC, 5 A
Téléchargements
Programmation de robots ROS
GitHub
Manuel électronique
Communauté
L'injecteur PoE+ pour Raspberry Pi ajoute la fonctionnalité Power-over-Ethernet (PoE) à un seul port d'un commutateur Ethernet non PoE, fournissant à la fois l'alimentation et les données via un seul câble Ethernet. Il offre une solution plug-and-play et économique pour introduire progressivement la fonctionnalité PoE dans les réseaux Ethernet existants.
L'injecteur PoE+ est un appareil monoport de 30 W, adapté à l'alimentation des équipements conformes aux normes IEEE 802.3af et 802.3at, y compris toutes les générations de HAT PoE pour Raspberry Pi. Il prend en charge des débits réseau de 10/100/1000 Mbit/s.
Remarque : Un câble secteur IEC séparé est requis pour le fonctionnement (non fourni).
Spécifications
Débit de données
10/100/1000 Mbit/s
Tension d'entrée
100 à 240 V CA
Puissance de sortie
30 W
Puissance de sortie sur les broches
4/5 (+), 7/8 (–)
Tension de sortie nominale
55 V CC
Connecteurs de données
RJ-45 blindé, EIA 568A et 568B
Connecteur d'alimentation
Entrée secteur IEC c13 (non fournie)
Humidité de stockage
Maximum 95%, sans condensation
Altitude de fonctionnement
–300 m à 3000 m
Température ambiante de fonctionnement
10°C à +50°C
Dimensions
159 x 51,8 x 33,5 mm
Téléchargements
Datasheet