Résultats de la recherche pour "mendocino OR motor OR x OR 8à"
-
Elektor Digital Motor Control - Projects with Arduino & Raspberry Pi (E-book)
This book is about DC electric motors and their use in Arduino and Raspberry Pi Zero W based projects. The book includes many tested and working projects where each project has the following sub-headings: Title of the project Description of the project Block diagram Circuit diagram Project assembly Complete program listing of the project Full description of the program The projects in the book cover the standard DC motors, stepper motors, servo motors, and mobile robots. The book is aimed at students, hobbyists, and anyone else interested in developing microcontroller based projects using the Arduino Uno or the Raspberry Pi Zero W. One of the nice features of this book is that it gives complete projects for remote control of a mobile robot from a mobile phone, using the Arduino Uno as well as the Raspberry Pi Zero W development boards. These projects are developed using Wi-Fi as well as the Bluetooth connectivity with the mobile phone. Readers should be able to move a robot forward, reverse, turn left, or turn right by sending simple commands from a mobile phone. Full program listings of all the projects as well as the detailed program descriptions are given in the book. Users should be able to use the projects as they are presented, or modify them to suit to their own needs.
€ 29,95
Membres : € 23,96
-
Elektor Digital Power Electronics in Motor Drives (E-book)
This book is for people who want to understand how AC drives (also known as inverter drives) work and how they are used in industry by showing mainly the practical design and application of drives. The key principles of power electronics are described and presented in a simple way, as are the basics of both DC and AC motors. The different parts of an AC drive are explained, together with the theoretical background and the practical design issues such as cooling and protection. An important part of the book gives details of the features and functions often found in AC drives and gives practical advice on how and where to use these. Also described is future drive technology, including a matrix inverter. The mathematics is kept to an essential minimum. Some basic understanding of mechanical and electrical theory is presumed, and a basic knowledge of single andthree phase AC systems would be useful. Anyone who uses or installs drives, or is just interested in how these powerful electronic products operate and control modern industry, will find this book fascinating and informative.
€ 29,95
Membres : € 23,96
-

Holybro Kit de drone Holybro QAV 250 ARF
Le kit QAV250 est le moyen idéal pour commencer à développer sur PX4 ou Ardupilot. Il associe un cadre de course 250 en fibre de carbone et des composants électroniques essentiels au mini pilote automatique Pixhawk 6C. Le kit est facile à assembler. Aucune soudure nécessaire. Spécifications Micromodule d'alimentation (PM06 v2) Moteurs : 2207 KV1950 Empattement : 250 mm Dimensions : 198 x 235 x 70 mm Poids : 347g Inclus Cellule 250 en fibre de carbone avec matériel Micromodule d'alimentation (PM06 v2) Moteurs : 2207 KV1950 Accessoires en plastique 5" Carte de gestion de l'alimentation entièrement assemblée avec ESC (BLHeli S ESC 20A) Sangles de batterie Remarque : la batterie LiPo n'est pas incluse.
€ 214,95
Meilleur prix
-

Elektor Labs Horloge de sable Elektor pour Raspberry Pi Pico
Accroche-regard basé sur Raspberry Pi Une horloge à sable standard ne fait qu'indiquer le temps qui passe. En revanche, cette horloge à sable contrôlée par le Raspberry Pi Pico indique l'heure exacte en 'gravant' les quatre chiffres de l'heure et des minutes dans la couche de sable. Après un temps réglable, le sable est aplati par deux moteurs vibrants et tout recommence. Au cœur de l'horloge de sable se trouvent deux servomoteurs qui entraînent un stylo dans un mécanisme de pantographe. Un troisième servomoteur soulève le stylo de haut en bas. Le bac à sable est équipé de deux moteurs vibrants qui aplatissent le sable. La partie électronique de l'horloge des sables se compose d'un Raspberry Pi Pico et d'une carte RTC/driver avec une horloge en temps réel, ainsi que des circuits de commande pour les servomoteurs. Un manuel de construction détaillé peut être téléchargé. Caractéristiques Dimensions: 135 x 110 x 80 mm Temps de construction : environ. 1,5 à 2 heures Inclus 3x Feuilles acryliques prédécoupées avec toutes les pièces mécaniques 3x Mini servomoteurs 2x moteurs de vibration 1x Raspberry Pi Pico 1x Carte RTC/pilote avec les pièces assemblées Ecrous, boulons, entretoises et fils pour l'assemblage Sable blanc à grains fins
€ 49,95€ 39,95
Meilleur prix
-
Elektor Digital Arduino & Co – Measure, Control, and Hack (E-book)
Clever Tricks with ATmega328 Pro Mini Boards With a simple Pro Mini board and a few other components, projects that 20 or 30 years ago were unthinkable (or would have cost a small fortune) are realized easily and affordably in this book: From simple LED effects to a full battery charging and testing station that will put a rechargeable through its paces, there’s something for everyone. All the projects are based on the ATmega328 microcontroller, which offers endless measuring, switching, and control options with its 20 input and output lines. For example, with a 7-segment display and a few resistors, you can build a voltmeter or an NTC-based thermometer. The Arduino platform offers the perfect development environment for programming this range of boards. Besides these very practical projects, the book also provides the necessary knowledge for you to create projects based on your own ideas. How to measure, and what? Which transistor is suitable for switching a certain load? When is it better to use an IC? How do you switch mains voltage? Even LilyPad-based battery-operated projects are discussed in detail, as well as many different motors, from simple DC motors to stepper motors. Sensors are another exciting topic: For example, a simple infrared receiver that can give disused remote controls a new lease on life controlling your home, and a tiny component that can actually measure the difference in air pressure between floor and table height!
€ 32,95
Membres : € 26,36
-
Elektor Digital ARM Microcontroller Interfacing (E-book)
Learn to interface and program hardware devices in a wide range of useful applications, using ARM7 microcontrollers and the C programming language. Examples covered in full detail include a simple LED to a multi-megabyte SD card running the FAT file system. Features of this book Build prototype circuits on breadboard or Veroboard and interface to ARM microcontrollers. A 32-bit ARM7 microcontroller is used in interfacing and software examples. Interfacing principles apply to other ARM microcontrollers and other non-ARM microcontrollers as well. Example programs are written in the C programming language. Use only free or open source software. Download and install all programming tools from the Internet. Template project files are provided for easy project creation. Hardware Interface to LEDs, transistors, optocouplers, relays, solenoids, switches, keypads, LCD displays, seven segment displays, DC motors, stepper motors, external analogue signals using the ADC, RS232, RS-485, TWI, USB, SPI and SD memory cards. Software Once hardware has been interfaced to a microcontroller, software must be written to control the hardware. You will learn how to write programs to operate externally interfaced hardware devices, use timers and interrupts. Also learn how to port FAT file system code for use with an SD memory card, program the PWM to produce an audio sine wave, program the PWM to speed control a DC motor and more. A chapter on more advanced ARM microcontrollers is included with an overview of some of the newest ARM microcontrollers and their features.
€ 29,95
Membres : € 23,96
-

Holybro Kit de drone Holybro X500 V2 ARF
Le kit X500 V2 ARF est un kit de drone professionnel en fibre de carbone abordable, léger et robuste, facile à assembler (moins de 15 minutes). Il est livré avec le kit de cadre X500 V2 et les moteurs, ESC, tableaux de distribution d'énergie et hélices préinstallés. Il est parfaitement compatible avec divers contrôleurs de vol tels que la série Holybro Pixhawk, Durandal, Pix32 V5, etc. Il existe de nombreuses améliorations par rapport au modèle précédent. Spécifications Empattement : 500 mm Modèle de montage moteur : 16x16 mm Corps du cadre : 144x144 mm, 2 mm d'épaisseur Hauteur du train d'atterrissage : 215 mm Espace entre les plaques supérieure et inférieure : 28 mm Poids : 610g Temps de vol : environ 18 minutes de vol stationnaire sans charge utile supplémentaire. Testé avec une batterie de 5000 mAh. Charge utile : 1 500 g (sans batterie) Recommandation de batterie : 4S 3000-5000 mAh 20C+ avec batterie Lipo XT60 (non incluse) Inclus Kit cadre X500 V2 Avec les éléments préinstallés : 4x moteurs : moteur Holybro 2216 KV920 (4 pièces) avec prise XT30 4x ESC (BLHeli S ESC 20A) 6x 1045 hélices Carte de distribution d'énergie – Prise XT60 pour batterie et prise XT30 pour ESC et périphériques Remarque : le support de caméra de profondeur est vendu séparément.
€ 379,95
Meilleur prix







-

, par Clemens Valens Banc d'essai : La graveuse CNC de bureau Anet 4540
Comme les imprimantes 3D et les machines de gravure au laser, les machines CNC se sont également démocratisées. Alors qu'elles coûtaient autrefois des milliers d'euros,...
-

, par Jean-François Simon LCR-mètre UNI-T UT603 (Essai)
Vous recherchez un LCR-mètre portable ? Découvrez les caractéristiques et les utilisations de l’UT603 dans notre essai détaillé!
-
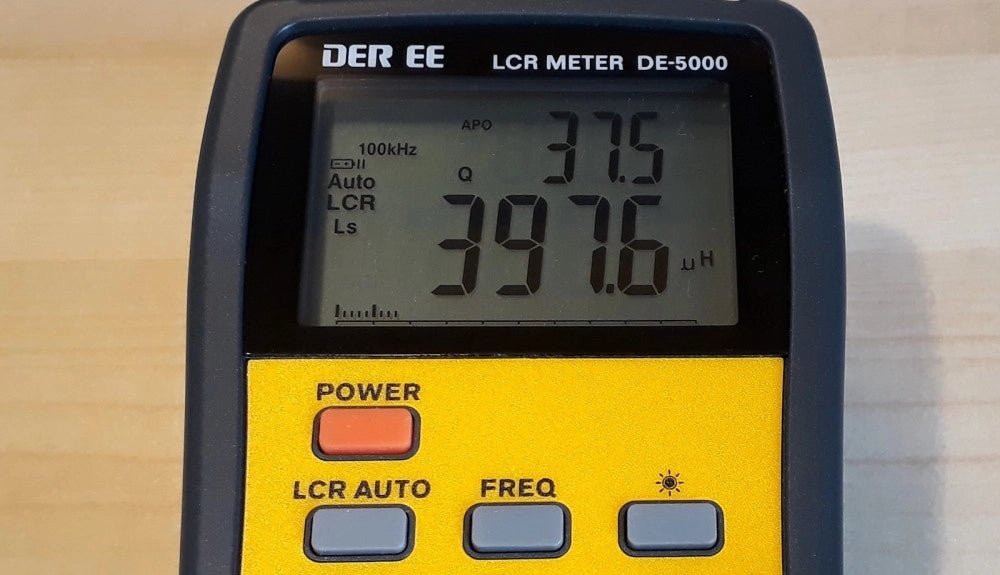
, par Jean-François Simon Le LCR-mètre DE-5000 (Essai)
Vous recherchez un LCR-mètre portable ? Découvrez les caractéristiques et les utilisations du DE-5000 dans notre essai détaillé !
-

, par Jean-François Simon Essai : Station de soudage CMS multifonctions Aoyue 866
Découvrez la station de soudage CMS Aoyue 866, ses caractéristiques et ses nombreux accessoires dans cet essai détaillé.
-
, par Lobna Belarbi Kickstart Your Electronics Journey with Elektor’s Learning Collection
Whether you're new to electronics or aiming to level up your embedded skills, Elektor’s Learning Collection delivers expert-curated kits, courses, and hands-on bundles. The first...




