Conçu pour les overclockers et autres utilisateurs expérimentés, ce ventilateur maintient votre Raspberry Pi 4 à une température de fonctionnement confortable, même sous une charge importante. Le ventilateur à température contrôlée fournit jusqu'à 1,4 CFM de flux d'air sur le processeur, la mémoire et le circuit intégré de gestion de l'alimentation. Le dissipateur thermique fourni (18 x 8 x 10 mm) avec tampon autocollant améliore le transfert de chaleur du processeur.
Le ventilateur du boîtier Raspberry Pi 4 fonctionne avec le Raspberry Pi 4 et le boîtier officiel Raspberry Pi 4.
Caractéristiques
Compatible avec Raspberry Pi 4 uniquement
Découpe dans le couvercle pour dissipateur thermique 40x30mm ou ventilateur SHIM
Profil ultra fin
Entièrement compatible HAT
Protège votre Pi bien-aimé Le dessus et la base transparents laissent le Raspberry Pi 4 visible
Découpe GPIO
Étiquettes postales pratiques gravées au laser
Laisse tous les ports accessibles
Fabriqué à partir d'acrylique coulé léger et de haute qualité
Idéal pour pirater et bricoler !
Fabriqué à Sheffield, Royaume-Uni
Pesant un peu plus de 50 grammes, le boîtier est léger et idéal pour être monté sur n'importe quelle surface. Aucun outil n'est requis pour le montage ou le démontage. Les dimensions sont : 99 × 66 × 15 mm.
Dans la vidéo ci-dessous, vous pouvez voir un guide de montage rapide.
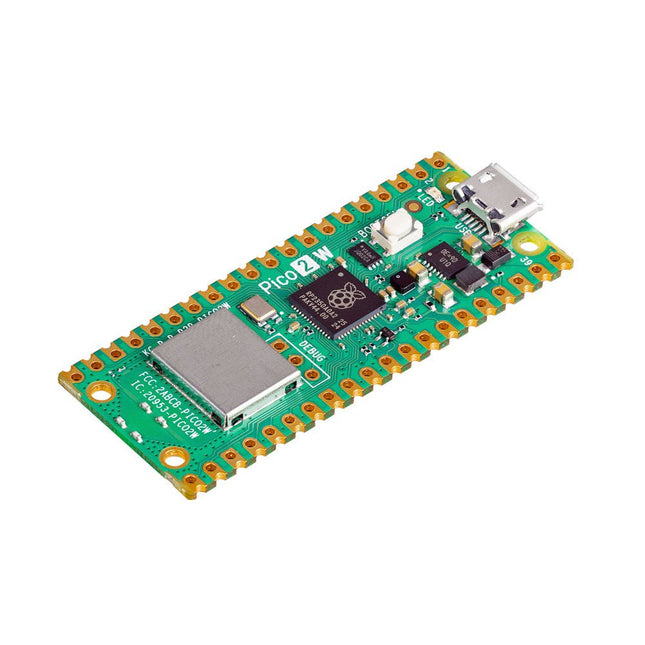
Le Raspberry Pi Pico 2 W est une carte microcontrôleur basée sur le RP2350 doté d'un réseau local sans fil 802.11n à 2,4 GHz et de Bluetooth 5.2. Il vous offre encore plus de flexibilité dans la conception de vos produits IoT ou intelligents et étend les possibilités de vos projets.
Le RP2350 fournit une architecture de sécurité complète construite autour d'Arm TrustZone pour Cortex-M. Il intègre un démarrage signé, 8 Ko d'OTP antifusible pour le stockage des clés, une accélération SHA-256, un TRNG matériel et des détecteurs de problèmes rapides.
La capacité unique à double cœur et à double architecture du RP2350 permet aux utilisateurs de choisir entre une paire de cœurs Arm Cortex-M33 standard et une paire de cœurs Hazard3 RISC-V à matériel ouvert. Programmable en C/C++ et Python, et pris en charge par une documentation détaillée, le Raspberry Pi Pico 2 W est la carte microcontrôleur idéale pour les passionnés et les développeurs professionnels.
Spécifications
Processeur
Processeurs Dual Arm Cortex-M33 ou double RISC-V Hazard3 à 150 MHz
Sand fil
Infineon CYW43439 monobande 2,4 GHz sans fil 802.11n et Bluetooth 5.2
Mémoire
520 Ko de SRAM sur puce ; Flash QSPI intégré de 4 Mo
Interfaces
26 broches GPIO polyvalentes, dont 4 pouvant être utilisées pour AD
Périphériques
2x UART
2x Contrôleurs SPI
2x Contrôleurs I²C
24x Canaux PWM
1x Contrôleur USB 1.1 et PHY, avec prise en charge des hôtes et des périphériques
12x Machines à états PIO
Puissance d'entrée
1,8-5,5 V CC
Dimensions
21 x 51 mm
Téléchargements
Datasheet
Pinout
Schematic
La plateforme ROS la plus populaire au monde
TurtleBot est le robot open source le plus populaire pour l'éducation et la recherche. La nouvelle génération de TurtleBot3 est un petit robot mobile, peu coûteux, entièrement programmable et basé sur ROS. Il est destiné à être utilisé pour l'éducation, la recherche, les loisirs et le prototypage de produits.
Coût abordable
TurtleBot a été développé pour répondre aux besoins économiques des écoles, des laboratoires et des entreprises. TurtleBot3 est le robot le plus abordable parmi les robots mobiles SLAM équipés d'un capteur de distance laser 360° LDS-01.
Norme ROS
La marque TurtleBot est gérée par Open Robotics, qui développe et maintient ROS. Aujourd'hui, ROS est devenu la plateforme de référence pour tous les roboticiens du monde. TurtleBot peut être intégré à des composants robotiques existants basés sur ROS, mais TurtleBot3 peut être une plateforme abordable pour ceux qui veulent commencer à apprendre ROS.
Extensibilité
TurtleBot3 encourage les utilisateurs à personnaliser sa structure mécanique à l'aide d'options alternatives : carte embarquée open source (en tant que carte de contrôle), ordinateur et capteurs. TurtleBot3 Waffle Pi est une plate-forme à deux roues à entraînement différentiel, mais sa structure et sa mécanique peuvent être personnalisées de nombreuses façons : voitures, vélos, remorques, etc. Développez vos idées au-delà de l'imagination avec différents SBC, capteurs et moteurs sur une structure évolutive.
Actionneur modulaire pour robot mobile
TurtleBot3 est capable d'obtenir des données spatiales précises en utilisant 2 DYNAMIXEL dans les articulations des roues. Les DYNAMIXEL de la série XM peuvent être utilisés selon l'un des 6 modes de fonctionnement (série XL : 4 modes de fonctionnement) : Mode de contrôle de la vitesse pour les roues, mode de contrôle du couple ou mode de contrôle de la position pour les articulations, etc. DYNAMIXEL peut même être utilisé pour fabriquer un manipulateur mobile qui est léger mais qui peut être contrôlé avec précision grâce au contrôle de la vitesse, du couple et de la position. DYNAMIXEL est un composant c?ur qui rend TurtleBot3 parfait. Il est facile à assembler, à entretenir, à remplacer et à reconfigurer.
Carte de contrôle ouverte pour ROS
La carte de contrôle est open-source au niveau du matériel et du logiciel pour la communication ROS. La carte de contrôle OpenCR1.0 est suffisamment puissante pour contrôler non seulement les capteurs DYNAMIXEL mais aussi les capteurs ROBOTIS qui sont fréquemment utilisés pour des tâches de reconnaissance de base de manière rentable. Différents capteurs tels que les capteurs tactiles, les capteurs infrarouges, les capteurs de couleur et bien d'autres sont disponibles. L'OpenCR1.0 possède un capteur IMU à l'intérieur de la carte afin d'améliorer la précision du contrôle pour d'innombrables applications. La carte dispose d'alimentations de 3,3 V, 5 V et 12 V pour renforcer les gammes d'appareils informatiques disponibles.
Source ouverte
Le matériel, le micrologiciel et le logiciel de TurtleBot3 sont des logiciels libres, ce qui signifie que les utilisateurs sont invités à télécharger, modifier et partager les codes sources. Tous les composants de TurtleBot3 sont fabriqués en plastique moulé par injection afin de réduire les coûts, mais les données de CAO 3D sont également disponibles pour l'impression 3D.
Spécifications
Vitesse de translation maximale
0.26 m/s
Vitesse de rotation maximale
1.82 rad/s (104.27 deg/s)
Charge utile maximale
30 kg
Taille (L x L x H)
281 x 306 x 141 mm
Poids (+ SBC + batterie + capteurs)
1.8 kg
Seuil de montée
Max 10 mm
Durée d'utilisation prévue
2 h
Temps de charge prévu
2 h 30 m
SBC (ordinateur à carte unique)
Raspberry Pi 4 (2 Go RAM)
MCU
32-bit ARM Cortex-M7 with FPU (216 MHz, 462 DMIPS)
Contrôleur à distance
RC-100B + BT-410 Set (Bluetooth 4, BLE)
Actionneur
XL430-W210
LDS (capteur de distance laser)
360 Laser Distance Sensor LDS-01 or LDS-02
Caméra
Raspberry Pi Camera Module v2.1
IMU
Gyroscope 3 axesAccelerometer 3 axes
Connecteurs d'alimentation
3.3 V/800 mA5 V/4 A12 V/1 A
Connecteurs d'extension
GPIO 18 brochesArduino 32 broches
Périphériques
3x UART, 1x bus CAN, 1x SPI, 1x I²C, 5x CAN, 4x 5-pin OLLO
Ports DYNAMIXEL
3x RS485, 3x TTL
Audio
Plusieurs séquences programmables
LED programmables
4x User LED
LED d'état
1x Board status LED1x Arduino LED1x Power LED
Boutons et interrupteurs
2x boutton poussoir, 1x bouton Reset, 2x DIPswitch
Batterie
Lithium polymer 11.1 V 1800 mAh / 19.98 Wh 5C
Connexion PC
USB
Mise à jour du micrologiciel
par USB / par JTAG
Adaptateur d'alimentation (SMPS)
Entrée: 100-240 VCA 50/60 Hz, 1.5 A @maxSortie: 12 VCC, 5 A
Téléchargements
Programmation de robots ROS
GitHub
Manuel électronique
Communauté
Construction ABS de haute qualité
Panneaux latéraux et couvercle amovibles pour un accès facile aux connecteurs GPIO, caméra et écran
Conduits de lumière pour LED d'alimentation et d'activité
Extraordinairement beau
Couleur : noir/gris
Construisez des machines robustes et intelligentes qui combinent la puissance de calcul du Raspberry Pi avec des composants LEGO.
Le Raspberry Pi Build HAT fournit quatre connecteurs pour les moteurs et capteurs LEGO Technic du portefeuille SPIKE. Les capteurs disponibles comprennent un capteur de distance, un capteur de couleur et un capteur de force polyvalent. Les moteurs angulaires sont disponibles dans une gamme de tailles et comprennent des encodeurs intégrés qui peuvent être interrogés pour trouver leur position.
Le Build HAT s'adapte à tous les ordinateurs Raspberry Pi dotés d'un connecteur GPIO à 40 broches, y compris – avec l'ajout d'un câble ruban ou d'un autre périphérique d'extension – le Raspberry Pi 400. Les appareils LEGO Technic connectés peuvent facilement être contrôlés en Python, aux côtés des accessoires Raspberry Pi standard. tel qu'un module de caméra.
Caractéristiques
Contrôle jusqu'à 4 moteurs et capteurs
Alimente le Raspberry Pi (lorsqu'il est utilisé avec un bloc d'alimentation externe approprié)
Facile à utiliser depuis Python sur le Raspberry Pi
Construction ABS de haute qualité
Panneaux latéraux et couvercle amovibles pour un accès facile aux connecteurs GPIO, caméra et écran
Conduits de lumière pour LED d'alimentation et d'activité
Extraordinairement beau
Couleur : blanc/rouge
Ce kit de démarrage de bureau Raspberry Pi 4 « Tout-en-un » contient toutes les pièces officielles et permet un démarrage facile et rapide !
Le kit de bureau Raspberry Pi 4 contient :
Clavier et souris américains Raspberry Pi
2x câble micro HDMI vers HDMI standard (A/M) 1 m Alimentation USB-C Raspberry Pi 15,3 W (version UE)
Boîtier Raspberry Pi 4
Guide officiel du Raspberry Pi pour débutants (langue anglaise)
NOOBS 16 Go avec carte microSD Raspbian
Le Raspberry Pi 4 B n'est PAS inclus.
Le JOY-iT Armor Case BLOCK est un boîtier robuste en aluminium conçu spécifiquement pour le Raspberry Pi 5. Il offre une excellente protection contre la chaleur et les chocs physiques, ce qui le rend adapté aux environnements difficiles. Sa conception compacte garantit qu'il ne nécessite pas d'espace supplémentaire, permettant une intégration transparente dans les projets existants.
Le boîtier comprend un grand dissipateur thermique pour améliorer l'efficacité du refroidissement. L'installation est simple, avec quatre vis (incluses) fixant le boîtier au Raspberry Pi.
Spécifications
Matériel
Alliage d'aluminium fraisé CNC
Performances de refroidissement
Ralenti : ~39°CPleine charge : ~75°C
Fonctionnalités spéciales
Grand dissipateur thermique, protection contre les chocs et la chaleur avec le même volume que sans boîtier
Dimensions (côté supérieur)
69 x 56 x 15,5 mm
Dimensions (côté inférieur)
87 x 56 x 7,5 mm
Program, build, and master over 60 projects with Python
The Raspberry Pi 5 is the latest single-board computer from the Raspberry Pi Foundation. It can be used in many applications, such as in audio and video media centers, as a desktop computer, in industrial controllers, robotics, and in many domestic and commercial applications. In addition to the well-established features found in other Raspberry Pi computers, the Raspberry Pi 5 offers Wi-Fi and Bluetooth (classic and BLE), which makes it a perfect match for IoT as well as in remote and Internet-based control and monitoring applications. It is now possible to develop many real-time projects such as audio digital signal processing, real-time digital filtering, real-time digital control and monitoring, and many other real-time operations using this tiny powerhouse.
The book starts with an introduction to the Raspberry Pi 5 computer and covers the important topics of accessing the computer locally and remotely. Use of the console language commands as well as accessing and using the desktop GUI are described with working examples. The remaining parts of the book cover many Raspberry Pi 5-based hardware projects using components and devices such as
LEDs and buzzers
LCDs
Ultrasonic sensors
Temperature and atmospheric pressure sensors
The Sense HAT
Camera modules
Example projects are given using Wi-Fi and Bluetooth modules to send and receive data from smartphones and PCs, and sending real-time temperature and atmospheric pressure data to the cloud.
All projects given in the book have been fully tested for correct operation. Only basic programming and electronics experience are required to follow the projects. Brief descriptions, block diagrams, detailed circuit diagrams, and full Python program listings are given for all projects described.
TurtleBot est le robot open source le plus populaire pour l'éducation et la recherche. La nouvelle génération de TurtleBot3 est un petit robot mobile, peu coûteux, entièrement programmable, basé sur ROS, modulaire, compact et personnalisable. Il est destiné à être utilisé pour l'éducation, la recherche, les loisirs et le prototypage de produits.
Avec TurtleBot, vous pourrez construire un robot capable de se déplacer dans votre maison, de voir en 3D et d'avoir suffisamment de puissance pour créer des applications passionnantes.
La plateforme ROS la plus populaire au monde
TurtleBot est le robot open source le plus populaire pour l'éducation et la recherche. La nouvelle génération de TurtleBot3 est un petit robot mobile, peu coûteux, entièrement programmable et basé sur ROS. Il est destiné à être utilisé pour l'éducation, la recherche, les loisirs et le prototypage de produits.
Coût abordable
TurtleBot a été développé pour répondre aux besoins économiques des écoles, des laboratoires et des entreprises. TurtleBot3 est le robot le plus abordable parmi les robots mobiles SLAM équipés d'un capteur de distance laser 360° LDS-01.
Petit format
Les dimensions de TurtleBot3 Burger ne sont que de 138 x 178 x 192 mm (L x L x H). Sa taille représente environ 1/4 de celle de son prédécesseur. Imaginez que vous puissiez garder TurtleBot3 dans votre sac à dos, développer votre programme et le tester partout où vous allez.
Norme ROS
La marque TurtleBot est gérée par Open Robotics, qui développe et entretient ROS. Aujourd'hui, ROS est devenu la plateforme de référence pour tous les roboticiens du monde entier. TurtleBot peut être intégré avec des composants robotiques existants basés sur ROS, mais TurtleBot3 peut être une plateforme abordable pour ceux qui veulent commencer à apprendre ROS.
Extensibilité
TurtleBot3 encourage les utilisateurs à personnaliser sa structure mécanique avec quelques options alternatives : carte embarquée open source (comme carte de contrôle), ordinateur et capteurs. TurtleBot3 Burger est une plate-forme à deux roues à entraînement différentiel, mais sa structure et sa mécanique peuvent être personnalisées de nombreuses façons : Voitures, vélos, remorques, etc. Développez vos idées au-delà de l'imagination avec différents SBC, capteurs et moteurs sur une structure évolutive.
Actionneur modulaire pour robot mobile
TurtleBot3 est capable d'obtenir des données spatiales précises en utilisant 2 DYNAMIXEL dans les articulations des roues. Les DYNAMIXEL de la série XM peuvent être utilisés selon l'un des 6 modes de fonctionnement (série XL : 4 modes de fonctionnement) : Mode de contrôle de la vitesse pour les roues, mode de contrôle du couple ou mode de contrôle de la position pour les articulations, etc. DYNAMIXEL peut même être utilisé pour fabriquer un manipulateur mobile qui est léger mais qui peut être contrôlé avec précision grâce au contrôle de la vitesse, du couple et de la position. DYNAMIXEL est un composant c?ur qui rend TurtleBot3 parfait. Il est facile à assembler, à entretenir, à remplacer et à reconfigurer.
Carte de contrôle ouverte pour ROS
La carte de contrôle est open-source au niveau du matériel et du logiciel pour la communication ROS. La carte de contrôle OpenCR1.0 est suffisamment puissante pour contrôler non seulement les capteurs DYNAMIXEL mais aussi les capteurs ROBOTIS qui sont fréquemment utilisés pour des tâches de reconnaissance de base de manière rentable. Différents capteurs tels que les capteurs tactiles, les capteurs infrarouges, les capteurs de couleur et bien d'autres sont disponibles. L'OpenCR1.0 possède un capteur IMU à l'intérieur de la carte afin d'améliorer la précision du contrôle pour d'innombrables applications. La carte dispose d'alimentations de 3,3 V, 5 V et 12 V pour renforcer les gammes d'appareils informatiques disponibles.
Des lignes de capteurs fortes
TurtleBot3 Burger utilise un LiDAR 360° amélioré, une unité de mesure inertielle à 9 axes et un encodeur précis pour votre recherche et développement.
Source ouverte
Le matériel, le micrologiciel et le logiciel de TurtleBot3 sont des logiciels libres, ce qui signifie que les utilisateurs sont invités à télécharger, modifier et partager les codes sources. Tous les composants de TurtleBot3 sont fabriqués en plastique moulé par injection afin de réduire les coûts, mais les données de CAO 3D sont également disponibles pour l'impression 3D.
Spécifications
Vitesse de translation maximale
0,22 m/s
Vitesse de rotation maximale
2,84 rad/s (162,72 deg/s)
Charge utile maximale
15 kg
Taille (L x L x H)
138 x 178 x 192 mm
Poids (+ SBC + batterie + capteurs)
1 kg
Seuil de montée
10 mm ou moins
Durée d'utilisation prévue
2h 30m
Temps de charge prévu
2h 30m
SBC (ordinateur à carte unique)
Raspberry Pi 4 (2 Go de RAM)
MCU
ARM Cortex-M7 32 bits avec FPU (216 MHz, 462 DMIPS)
Actionneur
XL430-W250
LDS (capteur de distance laser)
Capteur de distance laser 360 LDS-01 ou LDS-02
IMU
Gyroscope 3 axesAccéléromètre 3 axes
Connecteurs d'alimentation
3,3 V/800 mA5 V/4 A12 V/1 A
Connecteurs d'extension
GPIO 18 brochesArduino 32 broches
Périphériques
3x UART, 1x bus CAN, 1x SPI, 1x I²C, 5x CAN, 4x OLLO 5 broches
Ports DYNAMIXEL
3x RS485, 3x TTL
Audio
Plusieurs séquences de bips programmables
DEL programmables
4x LED utilisateur
LED d'état
1x LED d'état de la carte1x LED Arduino1x LED d'alimentation
Boutons et interrupteurs
2x boutons poussoirs, 1x bouton Reset, 2x DIP switch
Batterie
Lithium polymère 11.1 V 1800 mAh / 19.98 Wh 5C
Connexion PC
USB
Mise à jour du micrologiciel
via USB / via JTAG
Adaptateur d'alimentation (SMPS)
Entrée : 100-240 VCA 50/60 Hz, 1.5 A @maxSortie : 12 VCC, 5 A
Téléchargements
Programmation de robots ROS
GitHub
Manuel électronique
Communauté