Caractéristiques
Intègre le CAN V2.0B jusqu'à 1 Mb/s
Connecteur sub-D 9 broches standard industriel
OBD-II et CAN standard pinout selectable.
Pince de sélection de puce modifiable
Pin CS variable pour emplacement de carte TF
Pince INT modifiable
Bornes à vis permettant de connecter facilement CAN_H et CAN_L
Connecteurs de broches Arduino Uno
Support de carte micro SD
2 connecteurs Grove (I2C et UART)
Interface SPI jusqu'à 10 MHz
Données standard (11 bits) et étendues (29 bits) et trames distantes
Deux tampons de réception avec stockage prioritaire des messages
Tout sur les protocoles et leur mise en œuvre avec Arduino
Initialement destiné aux véhicules routiers, le réseau CAN (« Controller Area Network ») et son successeur le réseau CAN FD (« Flexible Data ») ont vu leurs champs d’application s’élargir à de nouveaux domaines. L’industrie propose de nombreux modules microcontrôleurs dotés d’une interface CAN et/ou CAN FD. L’environnement de développement Arduino a démocratisé la programmation de ces modules et il existe des bibliothèques qui implémentent un pilote CAN et/ou un pilote CAN FD.
La première partie dresse un rapide historique des réseaux CAN et CAN FD et expose la problématique des lignes de transmission en abordant succinctement leur théorie et présentant des résultats de simulation Spice.
La deuxième partie est consacrée au réseau CAN, en détaillant successivement la fonction logique du réseau, les transcepteurs, les contrôleurs, la topologie la plus classique (le bus) et d’autres moins courantes, les répéteurs et les passerelles. Les aspects particuliers du protocole, tels que le bit stuffing, l’arbitrage, les trames d’erreur, la détection des erreurs sont exposés. La discussion de la fiabilité du protocole est illustrée par des exemples mettant en évidence ses faiblesses.
La troisième partie présente le protocole CAN FD, ses deux variantes CAN FD ISO et CAN FD non ISO, leurs fiabilités, leurs faiblesses, mises en évidence par des exemples. Différents transcepteurs et contrôleurs CAN FD sont décrits.
La quatrième partie est dédiée aux applications : comment utiliser les services d’un pilote, concevoir une messagerie, utiliser un analyseur logique. Deux exemples d’application terminent cette partie.
Ce livre s’adresse aux amateurs et aux ingénieurs non spécialistes pour comprendre les possibilités qu’offre un réseau CAN et comment on le met en œuvre. Un enseignant trouvera des informations pour approfondir ses connaissances et pour concevoir des travaux pratiques. Une connaissance des microcontrôleurs, de leur programmation, de l’électronique numérique aidera à la lecture des schémas. La connaissance du langage C++ et du langage de simulation électronique Spice facilitera la compréhension des programmes qui sont décrits dans le livre. Tous les codes source sont disponibles sur le dépôt GitHub de l’auteur.
Téléchargements
GitHub
Tout sur les protocoles et leur mise en œuvre avec Arduino
Initialement destiné aux véhicules routiers, le réseau CAN (« Controller Area Network ») et son successeur le réseau CAN FD (« Flexible Data ») ont vu leurs champs d’application s’élargir à de nouveaux domaines. L’industrie propose de nombreux modules microcontrôleurs dotés d’une interface CAN et/ou CAN FD. L’environnement de développement Arduino a démocratisé la programmation de ces modules et il existe des bibliothèques qui implémentent un pilote CAN et/ou un pilote CAN FD.
La première partie dresse un rapide historique des réseaux CAN et CAN FD et expose la problématique des lignes de transmission en abordant succinctement leur théorie et présentant des résultats de simulation Spice.
La deuxième partie est consacrée au réseau CAN, en détaillant successivement la fonction logique du réseau, les transcepteurs, les contrôleurs, la topologie la plus classique (le bus) et d’autres moins courantes, les répéteurs et les passerelles. Les aspects particuliers du protocole, tels que le bit stuffing, l’arbitrage, les trames d’erreur, la détection des erreurs sont exposés. La discussion de la fiabilité du protocole est illustrée par des exemples mettant en évidence ses faiblesses.
La troisième partie présente le protocole CAN FD, ses deux variantes CAN FD ISO et CAN FD non ISO, leurs fiabilités, leurs faiblesses, mises en évidence par des exemples. Différents transcepteurs et contrôleurs CAN FD sont décrits.
La quatrième partie est dédiée aux applications : comment utiliser les services d’un pilote, concevoir une messagerie, utiliser un analyseur logique. Deux exemples d’application terminent cette partie.
Ce livre s’adresse aux amateurs et aux ingénieurs non spécialistes pour comprendre les possibilités qu’offre un réseau CAN et comment on le met en œuvre. Un enseignant trouvera des informations pour approfondir ses connaissances et pour concevoir des travaux pratiques. Une connaissance des microcontrôleurs, de leur programmation, de l’électronique numérique aidera à la lecture des schémas. La connaissance du langage C++ et du langage de simulation électronique Spice facilitera la compréhension des programmes qui sont décrits dans le livre. Tous les codes source sont disponibles sur le dépôt GitHub de l’auteur.
Téléchargements
GitHub
This book details the use of the Arduino Uno and the Raspberry Pi 4 in practical CAN bus based projects. Using either the Arduino Uno or the Raspberry Pi with off-the-shelf CAN bus interface modules considerably ease developing, debugging, and testing CAN bus based projects.
This book is written for students, practicing engineers, enthusiasts, and for everyone else wanting to learn more about the CAN bus and its applications. The book assumes that the reader has some knowledge of basic electronics. Knowledge of the C and Python programming languages and programming the Arduino Uno using its IDE and Raspberry Pi will be useful, especially if the reader intends to develop microcontroller-based projects using the CAN bus.
The book should be a useful source of reference material for anyone interested in finding answers to questions such as:
What bus systems are available for the automotive industry?
What are the principles of the CAN bus?
How can I create a physical CAN bus?
What types of frames (or data packets) are available in a CAN bus system?
How can errors be detected in a CAN bus system and how dependable is a CAN bus system?
What types of CAN bus controllers exist?
How do I use the MCP2515 CAN bus controller?
How do I create 2-node Arduino Uno-based CAN bus projects?
How do I create 3-node Arduino Uno-based CAN bus projects?
How do I set the acceptance masks and acceptance filters?
How do I analyze data on the CAN bus?
How do I create 2-node Raspberry Pi-based CAN bus projects?
How do I create 3-node Raspberry Pi-based CAN bus projects?
L'ESP8266 est un module WiFi impressionnant et abordable, adapté pour ajouter des fonctionnalités wifi à un projet a microcontrôleur existant via une connexion série UART. Le module peut même être reprogrammé pour agir comme un appareil autonome connecté au wifi– il suffit de l'alimenter ! Protocole 802.11 b/g/n wifi Direct (P2P), soft-AP Pile de protocole TCP/IP intégrée Ce module est un SOC ( système sur puce) autonome qui ne nécessite pas un microcontrôleur pour contrôler ses entrées et sorties comme vous le feriez normalement avec un Arduino, par exemple, car l'ESP-01 agit comme un nano ordinateur. Ainsi, vous pouvez donner à votre microcontrôleur un accès à Internet comme avec un shield wifi pour Arduino, ou vous pouvez simplement programmer l'ESP8266 pour qu'il ait non seulement accès à un réseau wifi, mais qu'il agisse également comme un microcontrôleur, ce qui rend l'ESP8266 très polyvalent.
Fonctionnalité, structure et manipulation d'un module de puissance
Pour les lecteurs débutant dans la gestion de l'énergie, l'« Abc des modules de puissance » contient les principes de base nécessaires à la sélection et à l'utilisation d'un module de puissance. Le livre décrit les relations et paramètres techniques liés aux modules de puissance et la base des techniques de calcul et de mesure.
Contenu
Les bases
Ce chapitre décrit la nécessité d'un convertisseur de tension DC/DC et ses fonctionnalités de base. De plus, diverses possibilités de réalisation d'un régulateur de tension sont présentées et les avantages essentiels d'un module de puissance sont mentionnés.
Topologies de circuits
Les concepts de circuits, les topologies Buck et Boost très fréquemment utilisées avec les modules de puissance sont expliqués en détail et d'autres topologies de circuits sont introduites.
Technologie, technologie de construction et de régulation
La construction mécanique d'un module de puissance est présentée, qui a une influence significative sur la CEM et les performances thermiques. De plus, les méthodes de contrôle sont expliquées et des conseils de conception de circuit sont fournis dans ce chapitre.
Méthodes de mesure
Des résultats de mesure significatifs sont absolument nécessaires pour évaluer un module de puissance. Les points de mesure et méthodes de mesure pertinents sont décrits dans ce chapitre.
Manutention
Les aspects de stockage et de manipulation des modules de puissance sont expliqués, ainsi que leurs procédés de fabrication et de soudure.
Sélection d'un module de puissance
Les paramètres et critères importants pour la sélection optimale d'un module de puissance sont présentés dans cette section.
Projects with Arduino Uno & Raspberry Pi with Examples for the MCP2515 CAN Bus Interface Module
This book details the use of the Arduino Uno and the Raspberry Pi 4 in practical CAN bus based projects. Using either the Arduino Uno or the Raspberry Pi with off-the-shelf CAN bus interface modules considerably ease developing, debugging, and testing CAN bus based projects.
This book is written for students, practicing engineers, enthusiasts, and for everyone else wanting to learn more about the CAN bus and its applications. The book assumes that the reader has some knowledge of basic electronics. Knowledge of the C and Python programming languages and programming the Arduino Uno using its IDE and Raspberry Pi will be useful, especially if the reader intends to develop microcontroller-based projects using the CAN bus.
The book should be a useful source of reference material for anyone interested in finding answers to questions such as:
What bus systems are available for the automotive industry?
What are the principles of the CAN bus?
How can I create a physical CAN bus?
What types of frames (or data packets) are available in a CAN bus system?
How can errors be detected in a CAN bus system and how dependable is a CAN bus system?
What types of CAN bus controllers exist?
How do I use the MCP2515 CAN bus controller?
How do I create 2-node Arduino Uno-based CAN bus projects?
How do I create 3-node Arduino Uno-based CAN bus projects?
How do I set the acceptance masks and acceptance filters?
How do I analyze data on the CAN bus?
How do I create 2-node Raspberry Pi-based CAN bus projects?
How do I create 3-node Raspberry Pi-based CAN bus projects?
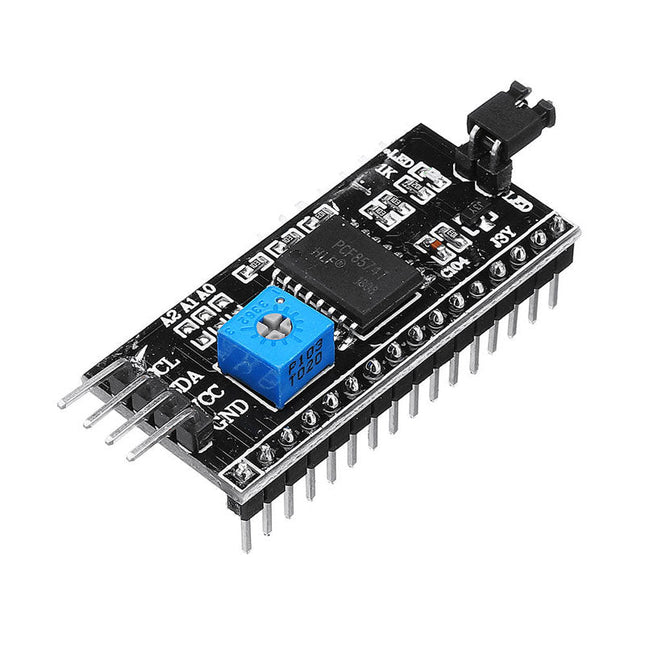
Il s'agit d'une autre excellente interface série IIC/I²C/TWI/SPI. Comme les ressources en broches du contrôleur sont limitées, votre projet risque de ne pas pouvoir utiliser le blindage LCD normal après avoir été connecté à une certaine quantité de capteurs ou de carte SD. Cependant, avec ce module d'interface I²C, vous pourrez réaliser l'affichage des données via seulement 2 fils. Si vous avez déjà des appareils I²C dans votre projet, ce module LCD ne coûte en réalité aucune ressource supplémentaire. C'est fantastique pour un projet basé.
Adresse I²C : 0X20~0X27 (l'adresse d'origine est 0X20, vous pouvez la modifier vous-même)
Le rétroéclairage et le contraste sont ajustés par potentiomètre
Livré avec 2 interfaces IIC, qui peuvent être connectées par Dupont Line ou un câble dédié IIC Adresse I²C : 0x27 (Adresse I²C : 0X20~0X27 (l'adresse d'origine est 0X27, vous pouvez la modifier vous-même)
Caractéristiques
Compatible pour 1602 LCD
Tension d'alimentation : 5 V
Poids : 5g
Taille: 5,5 x 2,3 x 1,4 cm
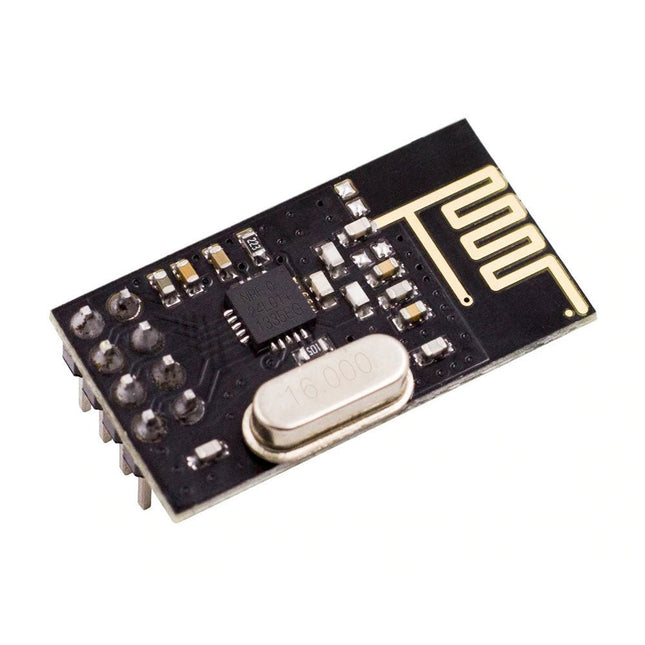
NRF24L01 est une puce émetteur-récepteur monolithique universelle en bande ISM fonctionnant dans la bande 2,4-2,5 GHz. Caractéristiques
Émetteur-récepteur sans fil comprenant : Générateur de fréquence, type amélioré, SchockBurstTM, contrôleur de mode, amplificateur de puissance, amplificateur à cristal, modulateur, démodulateur
La sélection du canal de puissance de sortie et les paramètres du protocole peuvent être définis avec une consommation de courant extrêmement faible, via l'interface SPI.
En mode de transmission, la puissance de transmission est de 6 dBm, le courant est de 9,0 mA, le courant du mode accepté est de 12,3 mA, la consommation de courant du mode mise hors tension et du mode veille est inférieure
Antenne 2,4 GHz intégrée, prend en charge jusqu'à six canaux de réception de données
Taille : 15 x 29 mm (antenne comprise)
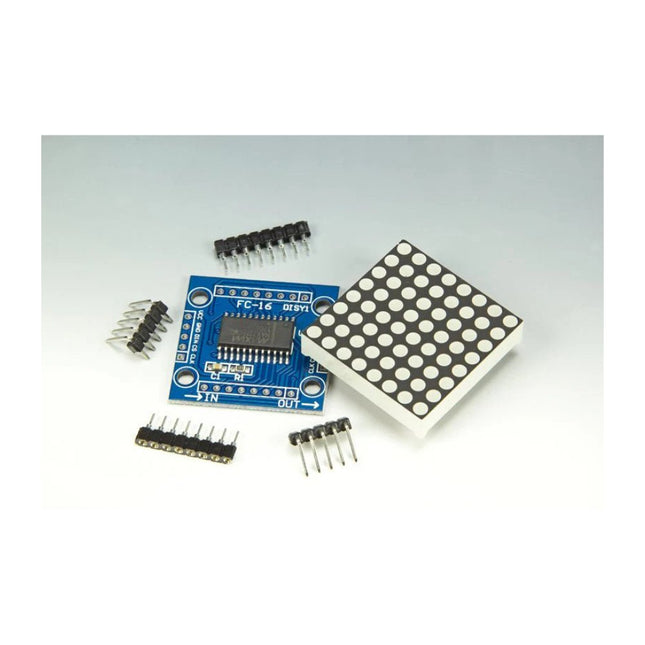
Affichage de texte déroulant avec huit écrans matriciels LED 8 x 8 (512 LED au total).
Construit autour d'un module Wi-Fi ESP-12F (basé sur ESP8266), programmé dans l'IDE Arduino. Le serveur Web ESP8266 permet de contrôler le texte affiché, le délai de défilement et la luminosité avec un téléphone mobile ou un autre appareil (portable) connecté au Wi-Fi.
Caractéristiques
Interface série 10 MHz
Contrôle individuel des segments LED
Sélection des chiffres avec décodage/sans décodage
Arrêt à faible consommation de 150 µA (données conservées)
Contrôle de la luminosité numérique et analogique
Affichage masqué à la mise sous tension
Affichage LED à cathode commune du lecteur
Pilotes de segment limités à taux de rotation pour des EMI inférieurs (MAX7221)
Interface série SPI, QSPI, MICROFIL (MAX7221)
Boîtiers DIP et SO à 24 broches
Remarque : Le circuit imprimé nu pour l'affichage des messages défilants (160491-1) est vendu séparément.
Ce module de caméra adopte une puce de capteur SmartSens SC3336 avec une résolution de 3 MP. Il présente une sensibilité élevée, un SNR élevé et des performances de faible luminosité et il est capable d'un effet d'imagerie de vision nocturne plus délicat et plus vif, et peut mieux s'adapter aux changements de lumière ambiante. En outre, il est compatible avec les cartes de la série Luckfox Pico.
Caractéristiques
Capteur
Capteur : SC3336
Taille CMOS : 1/2,8"
Pixels : 3 MP
Résolution statique : 2304x1296
Fréquence d'images vidéo maximale : 30 ips
Volet : Volet roulant
Lentille
Distance focale : 3,95 mm
Ouverture : F2.0
Champ de vision : 98,3 ° (diagonale)
Distorsion : <33 %
Mise au point : mise au point manuelle
Téléchargements
Wikia
Ce module Wi-Fi est basé sur la populaire puce ESP8266. Le module est certifié FCC et CE et conforme à la directive RoHS.
Entièrement compatible avec l'ESP-12E. 13 broches E/S (GPIO), 1 entrée analogique, 4 Mo de mémoire flash.