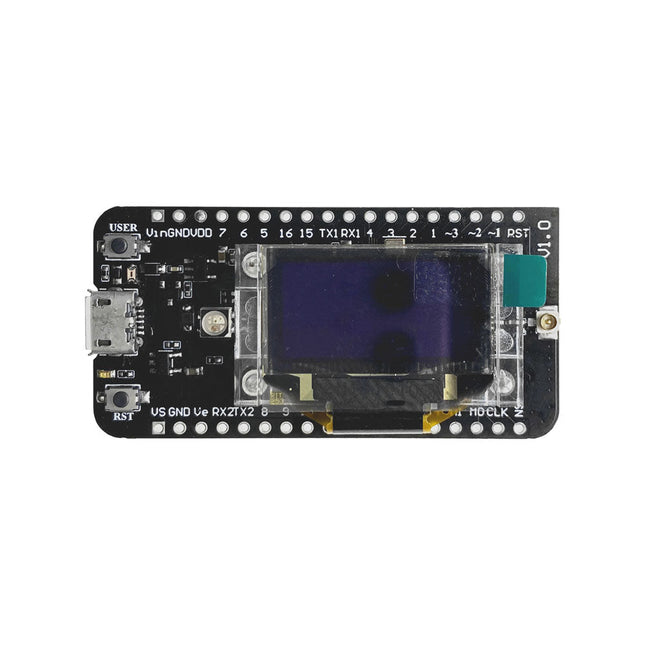
The CubeCell series is designed primarily for LoRa/LoRaWAN node applications.
Built on the ASR605x platform (ASR6501, ASR6502), these chips integrate the PSoC 4000 series MCU (ARM Cortex-M0+ Core) with the SX1262 module. The CubeCell series offers seamless Arduino compatibility, stable LoRaWAN protocol operation, and straightforward connectivity with lithium batteries and solar panels.
The HTCC-AB02S is a developer-friendly board with an integrated AIR530Z GPS module, ideal for quickly testing and validating communication solutions.
Features
Arduino compatible
Based on ASR605x (ASR6501, ASR6502), those chips are already integrated the PSoC 4000 series MCU (ARM Cortex M0+ Core) and SX1262
LoRaWAN 1.0.2 support
Ultra low power design, 21 uA in deep sleep
Onboard SH1.25-2 battery interface, integrated lithium battery management system (charge and discharge management, overcharge protection, battery power detection, USB/battery power automatic switching)
Good impendence matching and long communication distance
Onboard solar energy management system, can directly connect with a 5.5~7 V solar panel
Micro USB interface with complete ESD protection, short circuit protection, RF shielding, and other protection measures
Integrated CP2102 USB to serial port chip, convenient for program downloading, debugging information printing
Onboard 0.96-inch 128x64 dot matrix OLED display, which can be used to display debugging information, battery power, and other information
Using Air530 GPS module with GPS/Beidou Dual-mode position system support
Specifications
Main Chip
ASR6502 (48 MHz ARM Cortex-M0+ MCU)
LoRa Chipset
SX1262
Frequency
863~870 MHz
Max. TX Power
22 ±1 dBm
Max. Receiving Sensitivity
−135 dBm
Hardware Resource
2x UART1x SPI2x I²C1x SWD3x 12-bit ADC input8-channel DMA engine16x GPIO
Memory
128 Kb FLASH16 Kb SRAM
Power consumption
Deep sleep 21 uA
Interfaces
1x Micro USB1x LoRa Antenna (IPEX)2x (15x 2.54 Pin header) + 3x (2x 2.54 Pin header)
Battery
3.7 V lithium battery (power supply and charging)
Solar Energy
VS pin can be connected to 5.5~7 V solar panel
USB to Serial Chip
CP2102
Display
0.96" OLED (128 x 64)
Operating temperature
−20~70°C
Dimensions
55.9 x 27.9 x 9.5 mm
Included
1x CubeCell HTCC-AB02S Development Board
1x Antenna
1x 2x SH1.25 battery connector
Downloads
Datasheet
Schematic
GPS module (Manual)
Quick start
GitHub
Ready-to-use devices and self-built Arduino nodes in the 'The Things Network'
LoRaWAN has developed excellently as a communication solution in the IoT. The Things Network (TTN) has contributed to this. The Things Network was upgraded to The Things Stack Community Edition (TTS (CE)). The TTN V2 clusters were closed towards the end of 2021.
This book shows you the necessary steps to operate LoRaWAN nodes using TTS (CE) and maybe extend the network of gateways with an own gateway. Meanwhile, there are even LoRaWAN gateways suitable for mobile use with which you can connect to the TTN server via your cell phone.
The author presents several commercial LoRaWAN nodes and new, low-cost and battery-powered hardware for building autonomous LoRaWAN nodes. Registering LoRaWAN nodes and gateways in the TTS (CE), providing the collected data via MQTT and visualization via Node-RED, Cayenne, Thingspeak, and Datacake enable complex IoT projects and completely new applications at very low cost.
This book will enable you to provide and visualize data collected with battery-powered sensors (LoRaWAN nodes) wirelessly on the Internet. You will learn the basics for smart city and IoT applications that enable, for example, the measurement of air quality, water levels, snow depths, the determination of free parking spaces (smart parking), and the intelligent control of street lighting (smart lighting), among others.
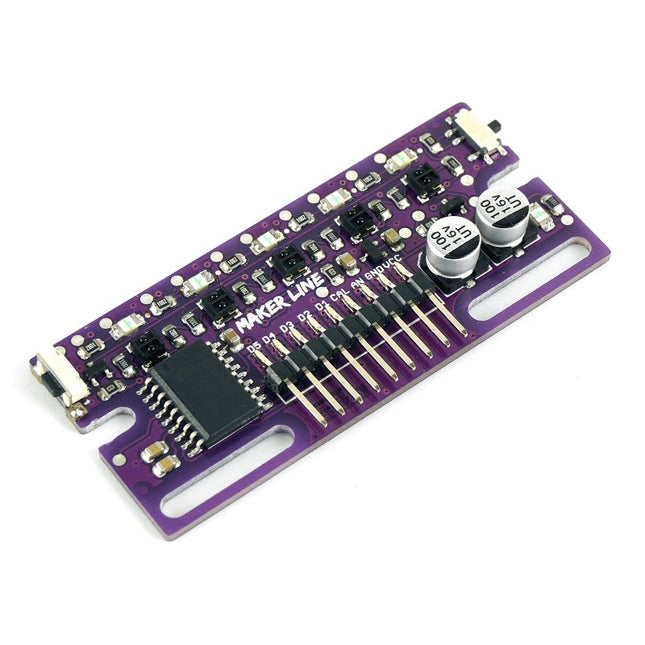
Maker Line est un capteur de ligne doté d'un réseau de 5 capteurs IR capable de suivre des lignes de 13 mm à 30 mm de largeur.
L'étalonnage du capteur a également été simplifié. Il n'est pas nécessaire d'ajuster le potentiomètre pour chaque capteur IR. Il vous suffit d'appuyer sur le bouton de calibrage pendant 2 secondes pour accéder au mode de calibrage. Ensuite, vous devez faire glisser les capteurs sur la ligne, appuyer à nouveau sur le bouton et vous êtes prêt à partir.
Les données d'étalonnage sont stockées dans l'EEPROM et restent intactes même lorsque le capteur est éteint. L'étalonnage ne doit donc être effectué qu'une seule fois, sauf si la hauteur du capteur, la couleur de la ligne ou la couleur de fond ont changé.
Maker Line prend également en charge deux sorties : 5 sorties numériques pour l'état de chaque capteur indépendamment, ce qui est similaire au capteur IR classique, mais vous bénéficiez d'un étalonnage facile, et également une sortie analogique, où la tension représente la position de la ligne. La sortie analogique offre également une résolution plus élevée par rapport aux sorties numériques séparées. Ceci est particulièrement utile lorsqu’une grande précision est requise lors de la construction d’un robot suiveur de ligne avec contrôle PID.
Caractéristiques
Tension de fonctionnement : compatible DC 3,3 V et 5 V (avec protection contre l'inversion de polarité)
Largeur de trait recommandée : 13 mm à 30 mm
Couleur de ligne sélectionnable (claire ou foncée)
Distance du capteur (hauteur) : 4 mm à 40 mm (Vcc = 5 V, ligne noire sur surface blanche)
Taux de rafraîchissement du capteur : 200 Hz
Processus d'étalonnage facile
Types de sortie double : 5 sorties numériques représentent chaque état du capteur IR, 1 sortie analogique représente la position de la ligne.
Prend en charge une large gamme de contrôleurs, tels que Arduino, Raspberry Pi, etc.
Téléchargements
Fiche de données
Tutoriel : Construire un robot de suivi de ligne bon marché
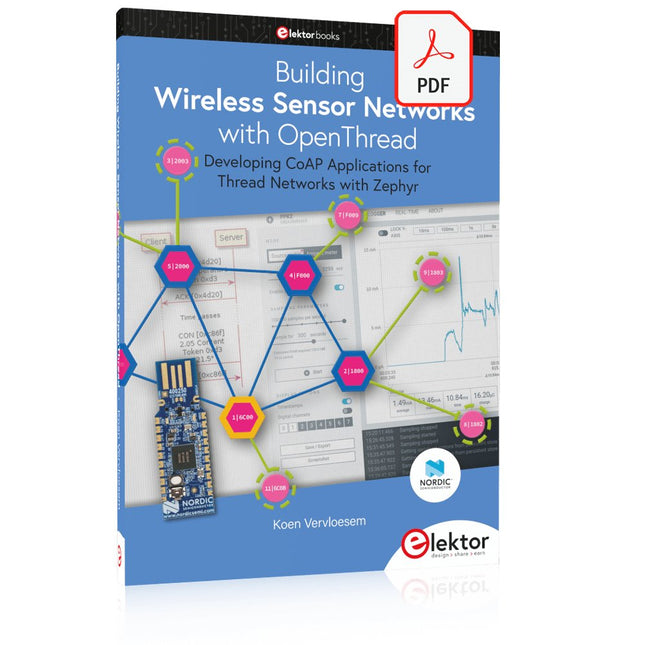
Developing CoAP applications for Thread networks with Zephyr
This book will guide you through the operation of Thread, the setup of a Thread network, and the creation of your own Zephyr-based OpenThread applications to use it. You’ll acquire knowledge on:
The capture of network packets on Thread networks using Wireshark and the nRF Sniffer for 802.15.4.
Network simulation with the OpenThread Network Simulator.
Connecting a Thread network to a non-Thread network using a Thread Border Router.
The basics of Thread networking, including device roles and types, as well as the diverse types of unicast and multicast IPv6 addresses used in a Thread network.
The mechanisms behind network discovery, DNS queries, NAT64, and multicast addresses.
The process of joining a Thread network using network commissioning.
CoAP servers and clients and their OpenThread API.
Service registration and discovery.
Securing CoAP messages with DTLS, using a pre-shared key or X.509 certificates.
Investigating and optimizing a Thread device’s power consumption.
Once you‘ve set up a Thread network with some devices and tried connecting and disconnecting them, you’ll have gained a good insight into the functionality of a Thread network, including its self-healing capabilities. After you’ve experimented with all code examples in this book, you’ll also have gained useful programming experience using the OpenThread API and CoAP.
40+ Projects using Arduino, Raspberry Pi and ESP32
This book is about developing projects using the sensor-modules with Arduino Uno, Raspberry Pi and ESP32 microcontroller development systems. More than 40 different sensors types are used in various projects in the book. The book explains in simple terms and with tested and fully working example projects, how to use the sensors in your project. The projects provided in the book include the following:
Changing LED brightness
RGB LEDs
Creating rainbow colours
Magic wand
Silent door alarm
Dark sensor with relay
Secret key
Magic light cup
Decoding commercial IR handsets
Controlling TV channels with IT sensors
Target shooting detector
Shock time duration measurement
Ultrasonic reverse parking
Toggle lights by clapping hands
Playing melody
Measuring magnetic field strength
Joystick musical instrument
Line tracking
Displaying temperature
Temperature ON/OFF control
Mobile phone-based Wi-Fi projects
Mobile phone-based Bluetooth projects
Sending data to the Cloud
The projects have been organized with increasing levels of difficulty. Readers are encouraged to tackle the projects in the order given. A specially prepared sensor kit is available from Elektor. With the help of this hardware, it should be easy and fun to build the projects in this book.
Le module de capteur d'empreintes digitales R301T est capable de collecter des images et d’exécuter des algorithmes grâce à sa puce intégrée. Une autre fonction remarquable du capteur est qu'il peut reconnaître l'empreinte digitale dans différentes conditions, par exemple l'humidité, la texture de la lumière ou les changements de la peau. Cela offre un très large éventail d'applications possibles pour sécuriser les serrures et les portes, entre autres. La puce peut envoyer des données via UART, TTL série et USB au contrôleur connecté. Specifications Modèle Capteur JP2000 Puce 32 Bit ARM Cortex-M3 Mémoires 96 Ko RAM, 1 Mo Flash Alimentation 4.2 - 6.0 V Courant de fonctionnement Typique: 40 mAPic: 50 mA Logic level 3,3 / 5 V TTL Logic Capacité de stockage d'empreintes digitales 3000 Empreintes Mode d'appariement 1:N identification1:1 vérification Niveau de sécurité réglable 1 - 5 niveaux(niveau de sécurité standard: 3) Taux d'acceptation erronée (au niveau de sécurité 3) Taux de rejet erroné (au niveau de sécurité 3) Délai de réponse Prétraitement: Correspondance: Prise en charge du débit en bauds 9600 - 921600 Communication UART Pas de parité, un bit d'arrêt Dimensions 42 x 19 x 8 mm Inclus 1x Capteur d'empreintes digitales COM-FP-R301T 1x Cable Téléchargements Fiche technique Manuel
Developing CoAP applications for Thread networks with Zephyr
This book will guide you through the operation of Thread, the setup of a Thread network, and the creation of your own Zephyr-based OpenThread applications to use it. You’ll acquire knowledge on:
The capture of network packets on Thread networks using Wireshark and the nRF Sniffer for 802.15.4.
Network simulation with the OpenThread Network Simulator.
Connecting a Thread network to a non-Thread network using a Thread Border Router.
The basics of Thread networking, including device roles and types, as well as the diverse types of unicast and multicast IPv6 addresses used in a Thread network.
The mechanisms behind network discovery, DNS queries, NAT64, and multicast addresses.
The process of joining a Thread network using network commissioning.
CoAP servers and clients and their OpenThread API.
Service registration and discovery.
Securing CoAP messages with DTLS, using a pre-shared key or X.509 certificates.
Investigating and optimizing a Thread device’s power consumption.
Once you‘ve set up a Thread network with some devices and tried connecting and disconnecting them, you’ll have gained a good insight into the functionality of a Thread network, including its self-healing capabilities. After you’ve experimented with all code examples in this book, you’ll also have gained useful programming experience using the OpenThread API and CoAP.
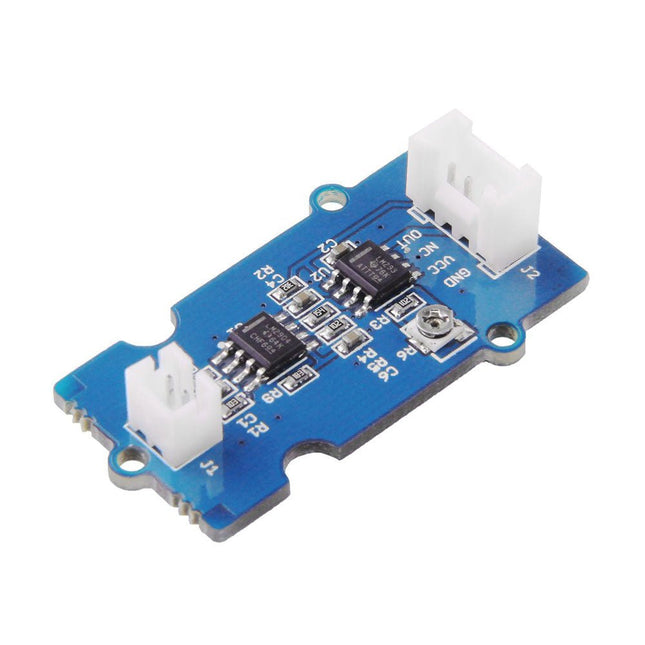
Le capteur de vibrations Grove Piezo convient aux mesures de flexibilité, de vibration, d'impact et de toucher. Le module est basé sur le capteur de film PZT LDT0-028. Lorsque le capteur se déplace d'avant en arrière, une certaine tension sera créée par le comparateur de tension à l'intérieur de celui-ci. Par conséquent, produit des niveaux élevés et faibles. Malgré sa grande réceptivité aux impacts violents, une large plage dynamique (0,001 Hz ~ 1 000 MHz) garantit également d'excellentes performances de mesure. Enfin, vous pouvez régler sa sensibilité en réglant le potentiomètre avec une vis.
Caractéristiques
Douille grossière standard
Large plage dynamique : 0,001 Hz ~ 1 000 MHz
Sensibilité réglable
Haute réceptivité pour un impact fort
Applications
Détection des vibrations dans la machine à laver
Commutateur de réveil à faible consommation
Détection de vibrations à faible coût
Alarmes de voiture
Mouvement du corps
Systèmes de sécurité
Téléchargements
Télécharger le Wiki PDF
Grove - Capteur de vibrations piézo-électriques Eagle File
Grove - Fichier PDF schématique du capteur de vibrations piézo-électriques
Grove - Fichier PDF du circuit imprimé du capteur de vibrations piézo-électriques
Fiche technique du capteur de vibrations piézo-électriques
Grove - Time of Flight Distance Sensor-VL53L0X est un capteur haute vitesse, haute précision et longue distance basé sur VL53L0X .
Le VL53L0X est un module de télémétrie laser à temps de vol (ToF) de nouvelle génération et il est l'un des plus petits du marché aujourd'hui. Il fournit une mesure de distance précise, indépendante des réflexions de la cible, ce qui le rend supérieur aux autres technologies conventionnelles. Il peut mesurer des distances absolues jusqu'à 2 m, élevant ainsi la norme en matière de performances de distance et permettant plusieurs nouvelles applications. Le VL53L0X intègre un réseau SPAD (diodes à avalanche à photon unique) de pointe et est doté de la technologie brevetée Flight SenseTM de deuxième génération de ST.
L'émetteur VCSEL (Vertical-Cavity Surface-Emitting Laser) de 940 nm du VL53L0X, complètement invisible à l'œil humain, associé à des filtres infrarouges physiques internes, permet des distances plus longues, une plus grande immunité à la lumière ambiante et une meilleure robustesse pour couvrir la diaphonie optique du verre.
Caractéristiques
Pilote VCSEL
capteur de distance avec microcontrôleur intégré avancé
Compensation de diaphonie optique intégrée avancée pour simplifier la sélection du verre de protection
Sans danger pour les yeux : Appareil laser de classe 1 conforme à la dernière norme IEC 60825-1:2014 - 3ème édition
Une seule alimentation
Interface I²C pour le contrôle des appareils et le transfert de données
Xshutdown (réinitialisation) et interruption GPIO
Adresse I²C programmable
Tension de fonctionnement : 3,3 V/5 V.
Température de fonctionnement : 20 ℃ - 70 ℃
Distance de mesure recommandée : 30 mm - 1000 mm
Adresse I²C par défaut : 0x52
Inclus
1x Grove - Capteur de distance de temps de vol-VL53L0X
1x câble Grove
Ce capteur de distance à ultrasons (ME007-ULA V1) offre des performances élevées avec une sonde robuste et étanche. Fonctionnant sur le principe de la télémétrie par écho ultrasonique, le capteur détermine la distance à une cible en mesurant le temps écoulé entre l'envoi d'une impulsion et la réception de l'écho. Sa conception sans contact lui permet de détecter une large gamme de matériaux, notamment des objets transparents ou non ferreux, des métaux, des non-métaux, des liquides, des solides et des poudres.
Spécifications
Détection de la distance
27~800 cm
Interface de sortie
RS232, tension analogique
Tension de fonctionnement
5-12 V
Courant moyen
<10 mA
Température de fonctionnement
−15~60°C
Dimensions
60 x 43 x 31 mm
electronica Fast Forward Start- & Scale-Up AwardsLes préparatifs s'accélèrent !Bluetooth Low Energy avec ESP32-C3 et ESP32Vous n'avez pas toujours besoin de choisir le wifi !Renifleur BLEReconfiguration du dongle USB nRF52840 MDK de makerdiaryCube magique de LED RGBcircuit avec un RP2040Marche/arrêt automatique pour le compresseur de pâte à souderContenu vidéo d'ElektorLivestreams, webinaires et cours pour les ingénieurs et les fabricants professionnelsÉlectrification d'un véloUtilisation d'un kit de modification de vélo électriqueDémarer en électroniqueMultiplication de tensionsSur le vifTransmutationsTeensy 4.0 – comment cette carte peut-elle être aussi rapide ?Ou: La vitesse, ce n'est pas sorcier !Simulation d'amplificateur de puissance audio avec TINA« simuler avant de construire »Développer et utiliser vos nœuds LoRaWAN pour l'Internet des Objets (IdO)Exemple de chapitre : Modules LoRaWAN Dragino LHT65, LDS01 et LDS02Projet 2.0Corrections, mises à jour et courriers des lecteurs5G pour mon propre exploitMaîtrise totale du déploiement de la 5G avec les réseaux cellulaires privésInfographicsLes meilleurs conseils pour développer une interface WiFiComment mon appareil apprend-il à transmettre ?Horloge Tour du Rhin Mod 2Analyseur de spectre audio avec dekatronsUne nouvelle façon d'utiliser les tubes rétroEnvoi de données à TelegramAvec un ESP32 et quelques composantsFiltre coupe-bande de Fliege pour les mesures audioFaites de meilleures mesures avec un filtre coupe-bandeDémontage d'un CO2-mètrePeut-on le bidouiller pour vos projets ?Tout mis ensembleLe transistor unijonction programmable expliquéÉcran tactile rond pour Raspberry PiL'HyperPixel 2.1 Round de PimoroniTélémesure avec détection des pertes de connexionGrâce aux modules nRF24L01+Récepteur FM numérique avec Arduino et TEA5767Restez à l'écoute avec un Arduino NanoConvertir une interface OLED de SPI vers I²CHomeLab ToursUn passe-temps ne prend pas sa retraiteUne décennie d'éthique en électroniqueLe regard de Tessel Renzenbrink sur la société numérique.HexadokuThe Original Elektorized Sudoku