Résultats de la recherche pour "raspberry OR pi OR 400 OR kit OR raspberry OR pi OR 4 OR based OR pc OR kit OR fr"
-

Raspberry Pi Foundation Kit de bureau officiel Raspberry Pi 4 (UE)
Ce kit de démarrage de bureau Raspberry Pi 4 « Tout-en-un » contient toutes les pièces officielles et permet un démarrage facile et rapide ! Le kit de bureau Raspberry Pi 4 contient : Clavier et souris américains Raspberry Pi 2x câble micro HDMI vers HDMI standard (A/M) 1 m Alimentation USB-C Raspberry Pi 15,3 W (version UE) Boîtier Raspberry Pi 4 Guide officiel du Raspberry Pi pour débutants (langue anglaise) NOOBS 16 Go avec carte microSD Raspbian Le Raspberry Pi 4 B n'est PAS inclus.
€ 64,95€ 25,98
Membres identique
-

Raspberry Pi Foundation Ventilateur du boîtier Raspberry Pi 4
Conçu pour les overclockers et autres utilisateurs expérimentés, ce ventilateur maintient votre Raspberry Pi 4 à une température de fonctionnement confortable, même sous une charge importante. Le ventilateur à température contrôlée fournit jusqu'à 1,4 CFM de flux d'air sur le processeur, la mémoire et le circuit intégré de gestion de l'alimentation. Le dissipateur thermique fourni (18 x 8 x 10 mm) avec tampon autocollant améliore le transfert de chaleur du processeur. Le ventilateur du boîtier Raspberry Pi 4 fonctionne avec le Raspberry Pi 4 et le boîtier officiel Raspberry Pi 4.
€ 6,95€ 2,78
Membres identique
-
Raspberry Pi Foundation Raspberry Pi RP2040 Microcontroller (10 pcs)
Caractéristiques techniques Dual ARM Cortex-M0+ @ 133 MHz 264 kB on-chip SRAM dans six blocs indépendants Prise en charge de jusqu'à 16 Mo de mémoire Flash hors puce via un bus QSPI dédié. Contrôleur DMA AHB crossbar entièrement connecté Périphériques interpolateurs et diviseurs d’entiers Régulateur LDO sur puce programmable pour générer la tension de base./li> 2x PLL sur puce pour générer les horloges USB et centrales 30x broches GPIO, dont 4 utilisables comme entrées analogiques Périphériques 2x UARTs 2x contrôleurs SPI 2x contrôleurs I²C 16x canaux PWM Contrôleur USB 1.1 et PHY, avec prise en charge de l'hôte et du dispositif 8x Machines d’état PIO Ce que vous recevrez 10x puces RP2040
€ 7,95€ 3,18
Membres identique
-

Robotis Robotis TurtleBot3 Waffle Pi (Raspberry Pi 4 inclus)
La plateforme ROS la plus populaire au monde TurtleBot est le robot open source le plus populaire pour l'éducation et la recherche. La nouvelle génération de TurtleBot3 est un petit robot mobile, peu coûteux, entièrement programmable et basé sur ROS. Il est destiné à être utilisé pour l'éducation, la recherche, les loisirs et le prototypage de produits. Coût abordable TurtleBot a été développé pour répondre aux besoins économiques des écoles, des laboratoires et des entreprises. TurtleBot3 est le robot le plus abordable parmi les robots mobiles SLAM équipés d'un capteur de distance laser 360° LDS-01. Norme ROS La marque TurtleBot est gérée par Open Robotics, qui développe et maintient ROS. Aujourd'hui, ROS est devenu la plateforme de référence pour tous les roboticiens du monde. TurtleBot peut être intégré à des composants robotiques existants basés sur ROS, mais TurtleBot3 peut être une plateforme abordable pour ceux qui veulent commencer à apprendre ROS. Extensibilité TurtleBot3 encourage les utilisateurs à personnaliser sa structure mécanique à l'aide d'options alternatives : carte embarquée open source (en tant que carte de contrôle), ordinateur et capteurs. TurtleBot3 Waffle Pi est une plate-forme à deux roues à entraînement différentiel, mais sa structure et sa mécanique peuvent être personnalisées de nombreuses façons : voitures, vélos, remorques, etc. Développez vos idées au-delà de l'imagination avec différents SBC, capteurs et moteurs sur une structure évolutive. Actionneur modulaire pour robot mobile TurtleBot3 est capable d'obtenir des données spatiales précises en utilisant 2 DYNAMIXEL dans les articulations des roues. Les DYNAMIXEL de la série XM peuvent être utilisés selon l'un des 6 modes de fonctionnement (série XL : 4 modes de fonctionnement) : Mode de contrôle de la vitesse pour les roues, mode de contrôle du couple ou mode de contrôle de la position pour les articulations, etc. DYNAMIXEL peut même être utilisé pour fabriquer un manipulateur mobile qui est léger mais qui peut être contrôlé avec précision grâce au contrôle de la vitesse, du couple et de la position. DYNAMIXEL est un composant c?ur qui rend TurtleBot3 parfait. Il est facile à assembler, à entretenir, à remplacer et à reconfigurer. Carte de contrôle ouverte pour ROS La carte de contrôle est open-source au niveau du matériel et du logiciel pour la communication ROS. La carte de contrôle OpenCR1.0 est suffisamment puissante pour contrôler non seulement les capteurs DYNAMIXEL mais aussi les capteurs ROBOTIS qui sont fréquemment utilisés pour des tâches de reconnaissance de base de manière rentable. Différents capteurs tels que les capteurs tactiles, les capteurs infrarouges, les capteurs de couleur et bien d'autres sont disponibles. L'OpenCR1.0 possède un capteur IMU à l'intérieur de la carte afin d'améliorer la précision du contrôle pour d'innombrables applications. La carte dispose d'alimentations de 3,3 V, 5 V et 12 V pour renforcer les gammes d'appareils informatiques disponibles. Source ouverte Le matériel, le micrologiciel et le logiciel de TurtleBot3 sont des logiciels libres, ce qui signifie que les utilisateurs sont invités à télécharger, modifier et partager les codes sources. Tous les composants de TurtleBot3 sont fabriqués en plastique moulé par injection afin de réduire les coûts, mais les données de CAO 3D sont également disponibles pour l'impression 3D. Spécifications Vitesse de translation maximale 0.26 m/s Vitesse de rotation maximale 1.82 rad/s (104.27 deg/s) Charge utile maximale 30 kg Taille (L x L x H) 281 x 306 x 141 mm Poids (+ SBC + batterie + capteurs) 1.8 kg Seuil de montée Max 10 mm Durée d'utilisation prévue 2 h Temps de charge prévu 2 h 30 m SBC (ordinateur à carte unique) Raspberry Pi 4 (2 Go RAM) MCU 32-bit ARM Cortex-M7 with FPU (216 MHz, 462 DMIPS) Contrôleur à distance RC-100B + BT-410 Set (Bluetooth 4, BLE) Actionneur XL430-W210 LDS (capteur de distance laser) 360 Laser Distance Sensor LDS-01 or LDS-02 Caméra Raspberry Pi Camera Module v2.1 IMU Gyroscope 3 axesAccelerometer 3 axes Connecteurs d'alimentation 3.3 V/800 mA5 V/4 A12 V/1 A Connecteurs d'extension GPIO 18 brochesArduino 32 broches Périphériques 3x UART, 1x bus CAN, 1x SPI, 1x I²C, 5x CAN, 4x 5-pin OLLO Ports DYNAMIXEL 3x RS485, 3x TTL Audio Plusieurs séquences programmables LED programmables 4x User LED LED d'état 1x Board status LED1x Arduino LED1x Power LED Boutons et interrupteurs 2x boutton poussoir, 1x bouton Reset, 2x DIPswitch Batterie Lithium polymer 11.1 V 1800 mAh / 19.98 Wh 5C Connexion PC USB Mise à jour du micrologiciel par USB / par JTAG Adaptateur d'alimentation (SMPS) Entrée: 100-240 VCA 50/60 Hz, 1.5 A @maxSortie: 12 VCC, 5 A Téléchargements Programmation de robots ROS GitHub Manuel électronique Communauté
€ 1.879,00
Membres identique
-
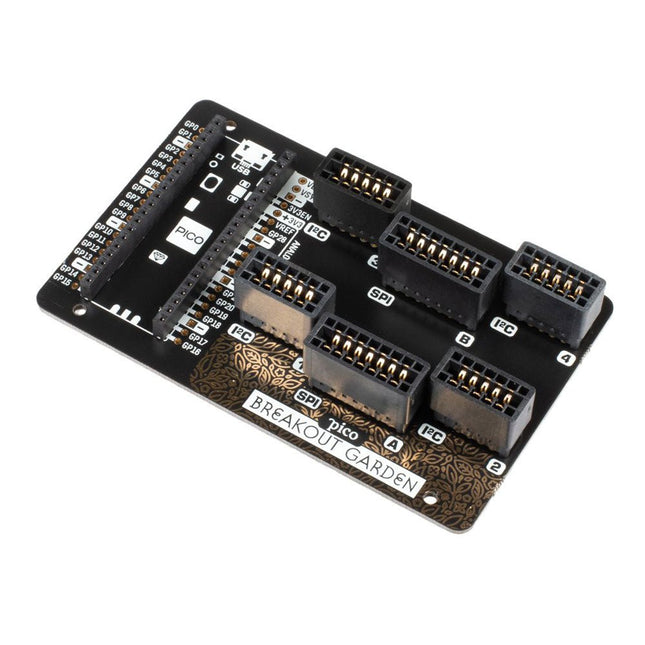
Pimoroni Pimoroni Raspberry Pi Pico Breakout Base de jardin
La base de jardin Pico Breakout se trouve sous votre Pico et vous permet d'y connecter jusqu'à six de notre vaste sélection de sorties Pimoroni. Qu'il s'agisse de capteurs environnementaux pour que vous puissiez suivre la température et l'humidité dans votre bureau, de toute une série de petits écrans pour les notifications et lectures importantes et, bien sûr, de LED. Faites défiler vers le bas pour une liste des sous-commissions actuellement compatibles avec nos bibliothèques C++/MicroPython ! En plus d'une zone d'atterrissage étiquetée pour votre Pico, il existe également un ensemble complet de connexions Pico découpées, au cas où vous auriez besoin de connecter encore plus de capteurs, de fils et de circuits. Nous avons ajouté des pieds en caoutchouc pour maintenir la base bien stable et pour l'empêcher de rayer votre bureau, ou il y a des trous de montage M2,5 dans les coins afin que vous puissiez la boulonner sur une surface solide si vous préférez. Les six emplacements noirs robustes sont des connecteurs de bord qui relient les sorties aux broches de votre Pico. Il y a deux emplacements pour les sorties SPI et quatre emplacements pour les sorties I²C. Parce qu'I²C est un bus, vous pouvez utiliser plusieurs appareils I²C en même temps, à condition qu'ils n'aient pas la même adresse I²C (nous nous sommes assurés que toutes nos sorties ont des adresses différentes, et nous les imprimons au dos de chaque bus). les éruptions cutanées pour qu'elles soient faciles à trouver). En plus d'être un moyen pratique d'ajouter des fonctionnalités à votre Pico, Breakout Garden est également très utile pour les projets de prototypage sans avoir besoin de câblage, de soudure ou de planches à pain compliqués, et vous pouvez agrandir ou modifier votre configuration à tout moment. Caractéristiques Six emplacements de connecteur de bord robustes pour les ruptures 4x emplacements I²C (5 broches) 2x emplacement SPI (7 broches) Zone d'atterrissage avec embases femelles pour Raspberry Pi Pico Pas de 0,1", connecteurs 5 ou 7 broches Des épingles cassées Protection contre l'inversion de polarité (intégrée aux breakouts) 99% assemblé – il suffit de coller les pieds ! Compatible avec Raspberry Pi Pico
€ 17,95€ 7,18
Membres identique
-

Raspberry Pi Foundation Boitier officiel pour Raspberry Pi 4 (blanc/rouge)
Boitier officiel pour Raspberry Pi 4 (blanc/rouge)
€ 7,95€ 3,18
Membres identique
-
Elektor Publishing Raspberry Pi 5 Essentials
Program, build, and master over 60 projects with Python The Raspberry Pi 5 is the latest single-board computer from the Raspberry Pi Foundation. It can be used in many applications, such as in audio and video media centers, as a desktop computer, in industrial controllers, robotics, and in many domestic and commercial applications. In addition to the well-established features found in other Raspberry Pi computers, the Raspberry Pi 5 offers Wi-Fi and Bluetooth (classic and BLE), which makes it a perfect match for IoT as well as in remote and Internet-based control and monitoring applications. It is now possible to develop many real-time projects such as audio digital signal processing, real-time digital filtering, real-time digital control and monitoring, and many other real-time operations using this tiny powerhouse. The book starts with an introduction to the Raspberry Pi 5 computer and covers the important topics of accessing the computer locally and remotely. Use of the console language commands as well as accessing and using the desktop GUI are described with working examples. The remaining parts of the book cover many Raspberry Pi 5-based hardware projects using components and devices such as LEDs and buzzers LCDs Ultrasonic sensors Temperature and atmospheric pressure sensors The Sense HAT Camera modules Example projects are given using Wi-Fi and Bluetooth modules to send and receive data from smartphones and PCs, and sending real-time temperature and atmospheric pressure data to the cloud. All projects given in the book have been fully tested for correct operation. Only basic programming and electronics experience are required to follow the projects. Brief descriptions, block diagrams, detailed circuit diagrams, and full Python program listings are given for all projects described.
€ 39,95
Membres € 35,96
-

Elektor Bundles Elektor Raspberry Pi Pico Advanced Kit (offre groupée)
Offre groupée complète de matériel et de livres pour le microcontrôleur RP2040 avec plus de 80 projets Débloquez le potentiel de la technologie de contrôleur moderne avec le Raspberry Pi Pico dans cette offre groupée. Parfait pour les utilisateurs débutants et expérimentés, ce guide facile à suivre vous emmène des bases de l'électronique aux complexités du traitement du signal numérique. Avec le Raspberry Pi Pico, le kit matériel dédié et la programmation MicroPython, vous apprendrez les principes clés de la conception de circuits, de la collecte de données et du traitement. Mettez en pratique plus de 80 projets, comme un chronomètre avec écran OLED, un télémètre laser et un ventilateur servocommandé. Ces projets sont conçus pour vous aider à appliquer ce que vous avez appris dans des scénarios réels. Le livre couvre également des sujets avancés tels que la technologie RFID sans fil, la détection d'objets et l'intégration de capteurs pour la robotique. Que vous cherchiez à développer vos compétences en électronique ou à vous plonger plus profondément dans les systèmes embarqués, cet ensemble est la ressource idéale pour vous aider à explorer tout le potentiel du Raspberry Pi Pico. Contenu de l'offre groupée 1x Livre de projet (273 pages) 1x Raspberry Pi Pico H 1x Kit de voiture intelligente Composants électroniques 2x Planches à pain sans soudure (400 trous) 1x Planche à pain sans soudure (170 trous) 5x LED colorées de 5 mm (verte, rouge, bleue, jaune et blanche) 1x Émetteur laser 1x Buzzer passif 1x Câble micro-USB (30 cm) 1x 65 fils de liaison 1x Câble Dupont mâle vers femelle de 20 cm 1x Étui transparent 1x Aimant (diamètre : 8 mm, épaisseur : 5 mm) 1x Potentiomètre rotatif 10x Résistances de 2 KΩ 2x Piliers en cuivre M2,5x30 mm 10x Vis à tête cylindrique Phillips 10x Écrous hexagonaux M2,5 en nickel 1x Tournevis double usage de 2 pouces Modules 1x Module RVB 1x Servomoteur 9G 1x Module joystick XY à deux axes 1x Module RFID RC522 1x Module d'affichage LED numérique 4 bits 1x Module d'affichage des feux de circulation 1x Module d'encodeur rotatif 1x Module d'affichage LCD 1602 (bleu) 1x Module de photorésistance 1x Moteur à courant continu avec fil Dupont mâle 1x Pale de ventilateur 1x Module Gouttes de Pluie 1x Module OLED 1x Clavier à interrupteur à membrane 1x Mini module à ressort magnétique 1x Télécommande infrarouge 1x Module récepteur infrarouge 1x Carte pilote de moteur pas à pas CC 1x Bouton Capteurs 1x Capteur de vibrations 1x Capteur d'humidité du sol 1x Capteur de son 1x Mini capteur de mouvement PIR 1x Capteur de température et d'humidité 1x Capteur de flamme 2x Capteurs de collision 2x Capteurs de suivi 1x Capteur à ultrasons
€ 99,95€ 79,95
Membres identique
-

Pimoroni Pibow Coupé 4 (Ninja) – Slim Case for Raspberry Pi 4
Caractéristiques Compatible avec Raspberry Pi 4 uniquement Découpe dans le couvercle pour dissipateur thermique 40x30mm ou ventilateur SHIM Profil ultra fin Entièrement compatible HAT Protège votre Pi bien-aimé Le dessus et la base transparents laissent le Raspberry Pi 4 visible Découpe GPIO Étiquettes postales pratiques gravées au laser Laisse tous les ports accessibles Fabriqué à partir d'acrylique coulé léger et de haute qualité Idéal pour pirater et bricoler ! Fabriqué à Sheffield, Royaume-Uni Pesant un peu plus de 50 grammes, le boîtier est léger et idéal pour être monté sur n'importe quelle surface. Aucun outil n'est requis pour le montage ou le démontage. Les dimensions sont : 99 × 66 × 15 mm. Dans la vidéo ci-dessous, vous pouvez voir un guide de montage rapide.
€ 11,95€ 4,78
Membres identique
-
Raspberry Pi Foundation Raspberry Pi Pico 2 W
Le Raspberry Pi Pico 2 W est une carte microcontrôleur basée sur le RP2350 doté d'un réseau local sans fil 802.11n à 2,4 GHz et de Bluetooth 5.2. Il vous offre encore plus de flexibilité dans la conception de vos produits IoT ou intelligents et étend les possibilités de vos projets. Le RP2350 fournit une architecture de sécurité complète construite autour d'Arm TrustZone pour Cortex-M. Il intègre un démarrage signé, 8 Ko d'OTP antifusible pour le stockage des clés, une accélération SHA-256, un TRNG matériel et des détecteurs de problèmes rapides. La capacité unique à double cœur et à double architecture du RP2350 permet aux utilisateurs de choisir entre une paire de cœurs Arm Cortex-M33 standard et une paire de cœurs Hazard3 RISC-V à matériel ouvert. Programmable en C/C++ et Python, et pris en charge par une documentation détaillée, le Raspberry Pi Pico 2 W est la carte microcontrôleur idéale pour les passionnés et les développeurs professionnels. Spécifications Processeur Processeurs Dual Arm Cortex-M33 ou double RISC-V Hazard3 à 150 MHz Sand fil Infineon CYW43439 monobande 2,4 GHz sans fil 802.11n et Bluetooth 5.2 Mémoire 520 Ko de SRAM sur puce ; Flash QSPI intégré de 4 Mo Interfaces 26 broches GPIO polyvalentes, dont 4 pouvant être utilisées pour AD Périphériques 2x UART 2x Contrôleurs SPI 2x Contrôleurs I²C 24x Canaux PWM 1x Contrôleur USB 1.1 et PHY, avec prise en charge des hôtes et des périphériques 12x Machines à états PIO Puissance d'entrée 1,8-5,5 V CC Dimensions 21 x 51 mm Téléchargements Datasheet Pinout Schematic
€ 7,95
Membres identique
-
Elektor Digital Machine Learning with Python for PC, Raspberry Pi, and Maixduino (E-book)
La plupart des gens sont de plus en plus confrontés aux applications de l’intelligence artificielle (IA). Les classements de musique ou de vidéo, les systèmes de navigation, les conseils d'achat, etc. reposent sur des méthodes qui peuvent être attribuées à ce domaine. Le terme intelligence artificielle a été inventé en 1956 lors d’une conférence internationale connue sous le nom de Dartmouth Summer Research Project. Une approche fondamentale consistait à modéliser le fonctionnement du cerveau humain et à construire des systèmes informatiques avancés sur cette base. Bientôt, le fonctionnement de l’esprit humain devrait être clair. Le transférer sur une machine n’était considéré qu’une petite étape. Cette notion s'est avérée un peu trop optimiste. Néanmoins, les progrès de l’IA moderne, ou plutôt de sa sous-spécialité appelée Machine Learning (ML), ne peuvent plus être niés. Dans ce livre, plusieurs systèmes différents seront utilisés pour connaître plus en détail les méthodes d’apprentissage automatique. En plus du PC, le Raspberry Pi et le Maixduino démontreront leurs capacités dans les différents projets. Outre des applications telles que la reconnaissance d'objets et de visages, des systèmes pratiques tels que des détecteurs de bouteilles, des compteurs de personnes ou un « œil qui parle » seront également créés. Ce dernier est capable de décrire acoustiquement des objets ou des visages détectés automatiquement. Par exemple, si un véhicule se trouve dans le champ de vision de la caméra connectée, l'information « Je vois une voiture ! est émis via une parole générée électroniquement. De tels appareils sont des exemples très intéressants de la manière dont, par exemple, les personnes aveugles ou gravement malvoyantes peuvent également bénéficier des systèmes d’IA.
€ 32,95
Membres € 26,36











-
, par Lobna Belarbi Les offres groupées Raspberry Pi d'Elektor : Des kits pour débutants aux kits avancés
Find the Perfect Raspberry Pi Bundle for Your Skill Level Whether you're a beginner eager to explore the world of Raspberry Pi or an advanced...
