Résultats de la recherche pour "raspberry OR pi OR 400 OR raspberry OR pi OR 4 OR based OR pc OR us"
-
Raspberry Pi Foundation Raspberry Pi RP2040 Microcontroller (10 pcs)
Caractéristiques techniques Dual ARM Cortex-M0+ @ 133 MHz 264 kB on-chip SRAM dans six blocs indépendants Prise en charge de jusqu'à 16 Mo de mémoire Flash hors puce via un bus QSPI dédié. Contrôleur DMA AHB crossbar entièrement connecté Périphériques interpolateurs et diviseurs d’entiers Régulateur LDO sur puce programmable pour générer la tension de base./li> 2x PLL sur puce pour générer les horloges USB et centrales 30x broches GPIO, dont 4 utilisables comme entrées analogiques Périphériques 2x UARTs 2x contrôleurs SPI 2x contrôleurs I²C 16x canaux PWM Contrôleur USB 1.1 et PHY, avec prise en charge de l'hôte et du dispositif 8x Machines d’état PIO Ce que vous recevrez 10x puces RP2040
€ 7,95€ 3,18
Meilleur prix
-

Robotis Robotis TurtleBot3 Waffle Pi (Raspberry Pi 4 inclus)
La plateforme ROS la plus populaire au monde TurtleBot est le robot open source le plus populaire pour l'éducation et la recherche. La nouvelle génération de TurtleBot3 est un petit robot mobile, peu coûteux, entièrement programmable et basé sur ROS. Il est destiné à être utilisé pour l'éducation, la recherche, les loisirs et le prototypage de produits. Coût abordable TurtleBot a été développé pour répondre aux besoins économiques des écoles, des laboratoires et des entreprises. TurtleBot3 est le robot le plus abordable parmi les robots mobiles SLAM équipés d'un capteur de distance laser 360° LDS-01. Norme ROS La marque TurtleBot est gérée par Open Robotics, qui développe et maintient ROS. Aujourd'hui, ROS est devenu la plateforme de référence pour tous les roboticiens du monde. TurtleBot peut être intégré à des composants robotiques existants basés sur ROS, mais TurtleBot3 peut être une plateforme abordable pour ceux qui veulent commencer à apprendre ROS. Extensibilité TurtleBot3 encourage les utilisateurs à personnaliser sa structure mécanique à l'aide d'options alternatives : carte embarquée open source (en tant que carte de contrôle), ordinateur et capteurs. TurtleBot3 Waffle Pi est une plate-forme à deux roues à entraînement différentiel, mais sa structure et sa mécanique peuvent être personnalisées de nombreuses façons : voitures, vélos, remorques, etc. Développez vos idées au-delà de l'imagination avec différents SBC, capteurs et moteurs sur une structure évolutive. Actionneur modulaire pour robot mobile TurtleBot3 est capable d'obtenir des données spatiales précises en utilisant 2 DYNAMIXEL dans les articulations des roues. Les DYNAMIXEL de la série XM peuvent être utilisés selon l'un des 6 modes de fonctionnement (série XL : 4 modes de fonctionnement) : Mode de contrôle de la vitesse pour les roues, mode de contrôle du couple ou mode de contrôle de la position pour les articulations, etc. DYNAMIXEL peut même être utilisé pour fabriquer un manipulateur mobile qui est léger mais qui peut être contrôlé avec précision grâce au contrôle de la vitesse, du couple et de la position. DYNAMIXEL est un composant c?ur qui rend TurtleBot3 parfait. Il est facile à assembler, à entretenir, à remplacer et à reconfigurer. Carte de contrôle ouverte pour ROS La carte de contrôle est open-source au niveau du matériel et du logiciel pour la communication ROS. La carte de contrôle OpenCR1.0 est suffisamment puissante pour contrôler non seulement les capteurs DYNAMIXEL mais aussi les capteurs ROBOTIS qui sont fréquemment utilisés pour des tâches de reconnaissance de base de manière rentable. Différents capteurs tels que les capteurs tactiles, les capteurs infrarouges, les capteurs de couleur et bien d'autres sont disponibles. L'OpenCR1.0 possède un capteur IMU à l'intérieur de la carte afin d'améliorer la précision du contrôle pour d'innombrables applications. La carte dispose d'alimentations de 3,3 V, 5 V et 12 V pour renforcer les gammes d'appareils informatiques disponibles. Source ouverte Le matériel, le micrologiciel et le logiciel de TurtleBot3 sont des logiciels libres, ce qui signifie que les utilisateurs sont invités à télécharger, modifier et partager les codes sources. Tous les composants de TurtleBot3 sont fabriqués en plastique moulé par injection afin de réduire les coûts, mais les données de CAO 3D sont également disponibles pour l'impression 3D. Spécifications Vitesse de translation maximale 0.26 m/s Vitesse de rotation maximale 1.82 rad/s (104.27 deg/s) Charge utile maximale 30 kg Taille (L x L x H) 281 x 306 x 141 mm Poids (+ SBC + batterie + capteurs) 1.8 kg Seuil de montée Max 10 mm Durée d'utilisation prévue 2 h Temps de charge prévu 2 h 30 m SBC (ordinateur à carte unique) Raspberry Pi 4 (2 Go RAM) MCU 32-bit ARM Cortex-M7 with FPU (216 MHz, 462 DMIPS) Contrôleur à distance RC-100B + BT-410 Set (Bluetooth 4, BLE) Actionneur XL430-W210 LDS (capteur de distance laser) 360 Laser Distance Sensor LDS-01 or LDS-02 Caméra Raspberry Pi Camera Module v2.1 IMU Gyroscope 3 axesAccelerometer 3 axes Connecteurs d'alimentation 3.3 V/800 mA5 V/4 A12 V/1 A Connecteurs d'extension GPIO 18 brochesArduino 32 broches Périphériques 3x UART, 1x bus CAN, 1x SPI, 1x I²C, 5x CAN, 4x 5-pin OLLO Ports DYNAMIXEL 3x RS485, 3x TTL Audio Plusieurs séquences programmables LED programmables 4x User LED LED d'état 1x Board status LED1x Arduino LED1x Power LED Boutons et interrupteurs 2x boutton poussoir, 1x bouton Reset, 2x DIPswitch Batterie Lithium polymer 11.1 V 1800 mAh / 19.98 Wh 5C Connexion PC USB Mise à jour du micrologiciel par USB / par JTAG Adaptateur d'alimentation (SMPS) Entrée: 100-240 VCA 50/60 Hz, 1.5 A @maxSortie: 12 VCC, 5 A Téléchargements Programmation de robots ROS GitHub Manuel électronique Communauté
€ 1.879,00
Meilleur prix
-
Elektor Digital Using Displays in Raspberry Pi Projects (E-book)
Learn to program displays and GUIs with Python This book is about Raspberry Pi 4 display projects. The book starts by explaining how to install the latest Raspbian operating system on an SD card, and how to configure and use the GPIO ports. The core of the book explains the following topics in simple terms with fully tested and working example projects: Simple LED projects Bar graph LED projects Matrix LED projects Bitmap LED projects LED strips LCDs OLED displays E-paper displays TFT displays 7-inch touch screen GUI Programming with Tkinder One unique feature of this book is that it covers almost all types of display that readers will need to use in their Raspberry Pi based projects. The operation of each project is fully given, including block diagrams, circuit diagrams, and commented full program listings. It is therefore an easy task to convert the given projects to run on other popular platforms, such as Arduino or PIC microcontrollers. Python program listings of all Raspberry Pi projects developed in this book are available for download at Elektor.com. Readers can use these programs in their projects. Alternatively, they can modify the programs to suit their applications.
€ 32,95
Membres : € 26,36
-
Elektor Publishing Raspberry Pi 5 Essentials
Program, build, and master over 60 projects with Python The Raspberry Pi 5 is the latest single-board computer from the Raspberry Pi Foundation. It can be used in many applications, such as in audio and video media centers, as a desktop computer, in industrial controllers, robotics, and in many domestic and commercial applications. In addition to the well-established features found in other Raspberry Pi computers, the Raspberry Pi 5 offers Wi-Fi and Bluetooth (classic and BLE), which makes it a perfect match for IoT as well as in remote and Internet-based control and monitoring applications. It is now possible to develop many real-time projects such as audio digital signal processing, real-time digital filtering, real-time digital control and monitoring, and many other real-time operations using this tiny powerhouse. The book starts with an introduction to the Raspberry Pi 5 computer and covers the important topics of accessing the computer locally and remotely. Use of the console language commands as well as accessing and using the desktop GUI are described with working examples. The remaining parts of the book cover many Raspberry Pi 5-based hardware projects using components and devices such as LEDs and buzzers LCDs Ultrasonic sensors Temperature and atmospheric pressure sensors The Sense HAT Camera modules Example projects are given using Wi-Fi and Bluetooth modules to send and receive data from smartphones and PCs, and sending real-time temperature and atmospheric pressure data to the cloud. All projects given in the book have been fully tested for correct operation. Only basic programming and electronics experience are required to follow the projects. Brief descriptions, block diagrams, detailed circuit diagrams, and full Python program listings are given for all projects described.
€ 39,95
Membres : € 35,96
-

Raspberry Pi Foundation Bumper pour Raspberry Pi 5
Le Raspberry Pi Bumper est une coque en silicone à clipser qui protège le bas et les bords du Raspberry Pi 5. Caractéristiques Bumper en caoutchouc de silicone flexible d'une seule pièce Permet d'accéder facilement au bouton d'alimentation Les trous de montage restent accessibles sous le bumper Téléchargements Datasheet
€ 3,50€ 1,40
Meilleur prix
-
Elektor Digital Machine Learning with Python for PC, Raspberry Pi, and Maixduino (E-book)
La plupart des gens sont de plus en plus confrontés aux applications de l’intelligence artificielle (IA). Les classements de musique ou de vidéo, les systèmes de navigation, les conseils d'achat, etc. reposent sur des méthodes qui peuvent être attribuées à ce domaine. Le terme intelligence artificielle a été inventé en 1956 lors d’une conférence internationale connue sous le nom de Dartmouth Summer Research Project. Une approche fondamentale consistait à modéliser le fonctionnement du cerveau humain et à construire des systèmes informatiques avancés sur cette base. Bientôt, le fonctionnement de l’esprit humain devrait être clair. Le transférer sur une machine n’était considéré qu’une petite étape. Cette notion s'est avérée un peu trop optimiste. Néanmoins, les progrès de l’IA moderne, ou plutôt de sa sous-spécialité appelée Machine Learning (ML), ne peuvent plus être niés. Dans ce livre, plusieurs systèmes différents seront utilisés pour connaître plus en détail les méthodes d’apprentissage automatique. En plus du PC, le Raspberry Pi et le Maixduino démontreront leurs capacités dans les différents projets. Outre des applications telles que la reconnaissance d'objets et de visages, des systèmes pratiques tels que des détecteurs de bouteilles, des compteurs de personnes ou un « œil qui parle » seront également créés. Ce dernier est capable de décrire acoustiquement des objets ou des visages détectés automatiquement. Par exemple, si un véhicule se trouve dans le champ de vision de la caméra connectée, l'information « Je vois une voiture ! est émis via une parole générée électroniquement. De tels appareils sont des exemples très intéressants de la manière dont, par exemple, les personnes aveugles ou gravement malvoyantes peuvent également bénéficier des systèmes d’IA.
€ 32,95
Membres : € 26,36
-

JOY-iT Joy-Pi Advanced Plate-forme de développement (avec Raspberry Pi 4, 8 Go)
Pour une durée limitée, le Joy-Pi Advanced est disponible en pack avantageux avec un Raspberry Pi 4 (8 Go) ! Le Joy-Pi Advanced est un dispositif compact et puissant qui vous permet de concrétiser vos projets rapidement et facilement. Que vous ayez déjà beaucoup d'expérience ou presque aucune, le Joy-Pi Advanced vous permet de libérer votre créativité. Grâce à sa compatibilité avec un large éventail de plates-formes, notamment Raspberry Pi, Raspberry Pi Pico, Arduino Nano, BBC micro:bit et NodeMCU ESP32, vous pouvez facilement et rapidement accéder à votre plate-forme préférée. De plus, le Joy-Pi Advanced propose plus de 30 stations, de leçons et de modules, vous offrant une variété illimitée de façons de mener à bien vos projets. Grâce au centre d'apprentissage auto-développé, vous pouvez non seulement améliorer vos compétences, mais également créer de nouveaux projets. Le centre d'apprentissage propose une multitude d'informations et de tutoriels qui vous guideront pas à pas dans vos projets. Le Joy-Pi Advanced est caractérisé en particulier par ses unités de commutation intelligentes, qui permettent une utilisation étendue des broches disponibles. Au total, trois unités de commutation sont intégrées, chacune équipée de 12 interrupteurs individuels qui offrent un contrôle précis des capteurs et des modules connectés. Ce système résout le problème bien connu de nombre limité de broches qui se produit avec les microcontrôleurs conventionnels. Les unités de commutation vous permettent de faire fonctionner un grand nombre de capteurs et de modules en parallèle en les allumant et en les éteignant individuellement. Cela simule une attribution de broches multiple, vous permettant d'exploiter toute la puissance de vos projets sans compromettre la fonctionnalité. En combinant des cartes adaptatrices innovantes et l'emplacement pour micro:bit, vous pouvez obtenir une compatibilité transparente avec un large éventail de microcontrôleurs tels que Raspberry Pi Pico, NodeMCU ESP32, micro:bit et Arduino Nano. Les cartes adaptatrices spécialement développées sont conçues pour correspondre parfaitement au microcontrôleur respectif. En insérant le microcontrôleur sur la carte adaptatrice appropriée, puis en l'insérant dans l'emplacement pour micro:bit, le Joy-Pi Advanced devient rapidement et facilement compatible avec les différents microcontrôleurs. Cela permet une intégration transparente de votre plate-forme préférée et la possibilité de combiner les forces des différents microcontrôleurs dans vos projets. De cette manière, vous pouvez vous concentrer pleinement sur vos projets créatifs sans vous soucier de la compatibilité des différents microcontrôleurs. Le Joy-Pi Advanced simplifie le processus de développement et vous donne la possibilité de concevoir vos projets de manière flexible et individuelle. Caractéristiques Plateforme de développement hautement intégrée et centre d'apprentissage Combinaison rapide, facile et sans fil de divers capteurs et actionneurs Option d'installation pour Raspberry Pi 4 Compatible avec divers microcontrôleurs Plate-forme d'apprentissage didactique auto-développée pour Raspberry Pi et Windows Spécifications Compatible avec Raspberry Pi 4, Arduino Nano, NodeMCU ESP32, BBC micro:bit, Raspberry Pi Pico Capteurs, actionneurs et composants installés 39 Plateforme d'apprentissage Plus de 40 entrées dans la base de connaissances, 10 projets, 10 tâches d'apprentissage, 14 visions Affichages Affichage 7 segments, affichage 16x2, affichage TFT 1,8", affichage OLED 0,96", matrice RGB 8x8 Capteurs DS18B20, capteur de choc, capteur à effet Hall, baromètre, capteur sonore, gyroscope, capteur PIR, barrière photoélectrique, NTC, capteur de lumière, 6 capteurs tactiles, capteur de couleur, capteur de distance ultrasonique, capteur de température et d'humidité DHT11 Contrôle Joystick, 5 interrupteurs, potentiomètre, codeur rotatif, matrice de boutons 4x4, relais, ventilateur PWM Moteurs Interface de servo, interface de moteur pas à pas, moteur de vibration Modules de mesure et de conversion Convertisseur analogique-numérique, convertisseur de niveau, voltmètre, alimentation en tension variable Autres composants Horloge en temps réel RTC, buzzer, mémoire EEPROM, récepteur infrarouge, plaque d'essai, lecteur RFID Cartes adaptatrices Adaptateur pour NodeMCU ESP32, Arduino Nano et Raspberry Pi Pico, connecteurs de carte pour Raspberry Pi et cartes externes Composants électroniques Télécommande infrarouge, puce RFID, carte RFID, 6 pinces crocodile, lecteur de carte microSD, servo-moteur, moteur pas à pas, carte microSD de 32 Go Composants 40 résistances, 3 LED vertes, 3 LED jaunes, 3 LED rouges, 1 transistor, 5 boutons, 1 potentiomètre, 2 condensateurs Autres accessoires Assortiment de vis, tournevis, sac de rangement pour accessoires, alimentation et câble d'alimentation, support de servo Alimentation Alimentation intégrée : 36 W, 12 V, 3 A Connecteur de boîtier : Fiche pour petit appareil C8 Sorties de tension 12 V, 5 V, 3,3 V, sortie de tension variable (2-11 V) Bus de données et sorties de signal I²C, SPI, convertisseur analogique-numérique Pile (RTC) CR2032 Dimensions 327 x 200 x 52 mm Inclus Raspberry Pi 4 (8 Go de RAM) Téléchargements Joy-Pi website Datasheet Manual
€ 519,00€ 419,00
Meilleur prix
-
Elektor Publishing Raspberry Pi 5 for Radio Amateurs
Program and Build Raspberry Pi 5 Based Ham Station Utilities with the RTL-SDR The RTL-SDR devices (V3 and V4) have gained popularity among radio amateurs because of their very low cost and rich features. A basic system may consist of a USB based RTL-SDR device (dongle) with a suitable antenna, a Raspberry Pi 5 computer, a USB based external audio input-output adapter, and software installed on the Raspberry Pi 5 computer. With such a modest setup, it is possible to receive signals from around 24 MHz to over 1.7 GHz. This book is aimed at amateur radio enthusiasts and electronic engineering students, as well as at anyone interested in learning to use the Raspberry Pi 5 to build electronic projects. The book is suitable for both beginners through experienced readers. Some knowledge of the Python programming language is required to understand and eventually modify the projects given in the book. A block diagram, a circuit diagram, and a complete Python program listing is given for each project, alongside a comprehensive description. The following popular RTL-SDR programs are discussed in detail, aided by step-by-step installation guides for practical use on a Raspberry Pi 5: SimpleFM GQRX SDR++ CubicSDR RTL-SDR Server Dump1090 FLDIGI Quick RTL_433 aldo xcwcp GPredict TWCLOCK CQRLOG klog Morse2Ascii PyQSO Welle.io Ham Clock CHIRP xastir qsstv flrig XyGrib FreeDV Qtel (EchoLink) XDX (DX-Cluster) WSJT-X The application of the Python programming language on the latest Raspberry Pi 5 platform precludes the use of the programs in the book from working on older versions of Raspberry Pi computers.
€ 39,95
Membres : € 35,96
-
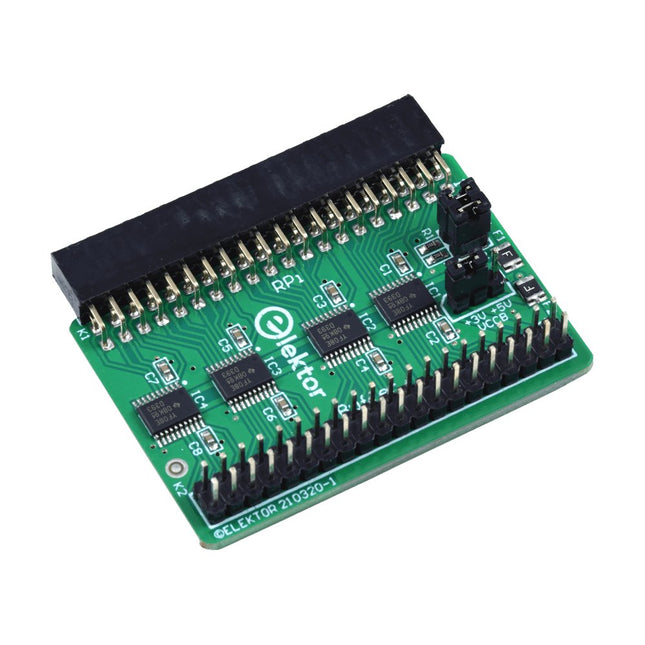
Elektor Labs Carte tampon pour Raspberry Pi d'Elektor
Lorsque vous expérimentez régulièrement avec le Raspberry Pi et que vous connectez une variété de matériel externe au port GPIO via le connecteur, il se peut que vous ayez causé des dommages par le passé. La carte tampon Raspberry Pi d'Elektor est là pour éviter cela ! La carte est compatible avec les Raspberry Pi Zero, Zero 2 (W), 3, 4, 5, 400 et 500. Les 26 GPIO sont protégées par des convertisseurs de tension bidirectionnels afin de protéger le Raspberry Pi lors de l'expérimentation de nouveaux circuits. Le circuit imprimé est destiné à être inséré à l'arrière du Raspberry Pi 400/500. Le connecteur à connecter au Raspberry Pi est un réceptacle 40 voies à angle droit (2x20). La platine est seulement un peu plus large. Un câble plat à 40 voies avec des connecteurs 2x20 appropriés peut être connecté au connecteur de sortie du tampon pour expérimenter avec par exemple un circuit sur une plaque d’expérimentation ou sur une platine. Le circuit utilise 4x circuits intégrés TXS0108E de Texas Instruments. Le circuit imprimé peut également être monté sur un Raspberry Pi. Téléchargements Schematics Layout
€ 34,95€ 29,95
Meilleur prix
-

Elektor Bundles Learn Edge AI with Raspberry Pi
Cette offre groupée pratique vous permet de créer de véritables applications d’IA en périphérie avec le Raspberry Pi Raspberry Pi AI HAT+ (13 TOPS) Le Raspberry Pi AI HAT+ est une carte d'extension conçue pour le Raspberry Pi 5, dotée d'un accélérateur Hailo AI intégré. Ce module complémentaire offre une approche rentable, efficace et accessible pour intégrer des capacités d'IA hautes performances, avec des applications couvrant le contrôle des processus, la sécurité, la domotique et la robotique. L'AI HAT+ se connecte via l'interface PCIe Gen3 du Raspberry Pi 5. Lorsque le Raspberry Pi 5 exécute une version actuelle du système d'exploitation Raspberry Pi, il détecte automatiquement l'accélérateur Hailo intégré, rendant l'unité de traitement neuronal (NPU) disponible pour les tâches d'IA. De plus, les applications de caméra rpicam-apps incluses dans Raspberry Pi OS prennent en charge de manière transparente le module AI, en utilisant automatiquement le NPU pour les fonctions de post-traitement compatibles. Raspberry Pi Camera Module 3 Le module Caméra Raspberry Pi 3 est un appareil photo compact de Raspberry Pi. Il est doté d'un capteur IMX708 de 12 mégapixels avec HDR et d'un autofocus à détection de phase. Le Camera Module 3 est disponible en version standard et en version grand angle, toutes deux avec ou sans filtre infrarouge. Le Camera Module 3 peut être utilisé pour prendre des vidéos full HD ainsi que des photos, et dispose d'un mode HDR jusqu'à 3 mégapixels. Son fonctionnement est entièrement pris en charge par la bibliothèque libcamera, y compris la fonction d'autofocus rapide de Camera Module 3 : cela le rend facile à utiliser pour les débutants, tout en offrant beaucoup pour les utilisateurs avancés. Camera Module 3 est compatible avec tous les ordinateurs Raspberry Pi. Livre : Edge AI Made Practical – AI Projects for the Raspberry Pi with the AI HAT+ L'intelligence artificielle embarquée (Edge AI) transforme les appareils du quotidien en intégrant l'intelligence là où elle est la plus utile : directement au cœur du matériel. Grâce à l'inférence embarquée, une caméra peut reconnaître instantanément un visiteur, un téléphone peut traduire la parole sans envoyer l'audio vers le cloud et un objet connecté peut détecter les anomalies en temps réel – rapidement, en toute confidentialité et de manière fiable, même en cas de perte de réseau. Ce livre est votre guide pratique pour construire précisément ce type de systèmes avec le Raspberry Pi AI HAT+ et l'accélérateur Hailo-8L. Vous commencerez par des bases solides : les concepts fondamentaux de l'IA et de l'apprentissage automatique, le fonctionnement des réseaux neuronaux et ce qui distingue véritablement l'Edge AI de l'IA cloud – ainsi qu'une analyse franche des considérations éthiques et des impacts futurs. Cette offre groupée contient : Livre : Edge AI Made Practical Raspberry Pi AI HAT+ (13 TOPS) Raspberry Pi Camera Module 3 Refroidisseur actif pour Raspberry Pi 5 Câble d'écran FPC pour Raspberry Pi 5 (300 mm) Kit de composants Elektor Connecteur GPIO 40 broches Module de feux de signalisation LED rouge 5 V avec résistance intégrée LED jaune 5 V avec résistance intégrée LED verte 5 V avec résistance intégrée LED bleue 5 V avec résistance intégrée Plaque d'essai (400 points de connexion) 10 connecteurs Dupont Câbles (mâle-femelle) Module de capteur DHT22 Servomoteur Requis Raspberry Pi 5
€ 169,95
Meilleur prix
-

Elektor Publishing PID-based Practical Digital Control with Raspberry Pi and Arduino Uno
The Arduino Uno is an open-source microcontroller development system encompassing hardware, an Integrated Development Environment (IDE), and a vast number of libraries. It is supported by an enormous community of programmers, electronic engineers, enthusiasts, and academics. The libraries in particular really smooth Arduino programming and reduce programming time. What’s more, the libraries greatly facilitate testing your programs since most come fully tested and working. The Raspberry Pi 4 can be used in many applications such as audio and video media devices. It also works in industrial controllers, robotics, games, and in many domestic and commercial applications. The Raspberry Pi 4 also offers Wi-Fi and Bluetooth capability which makes it great for remote and Internet-based control and monitoring applications. This book is about using both the Raspberry Pi 4 and the Arduino Uno in PID-based automatic control applications. The book starts with basic theory of the control systems and feedback control. Working and tested projects are given for controlling real-life systems using PID controllers. The open-loop step time response, tuning the PID parameters, and the closed-loop time response of the developed systems are discussed together with the block diagrams, circuit diagrams, PID controller algorithms, and the full program listings for both the Raspberry Pi and the Arduino Uno. The projects given in the book aim to teach the theory and applications of PID controllers and can be modified easily as desired for other applications. The projects given for the Raspberry Pi 4 should work with all other models of Raspberry Pi family. The book covers the following topics: Open-loop and closed-loop control systems Analog and digital sensors Transfer functions and continuous-time systems First-order and second-order system time responses Discrete-time digital systems Continuous-time PID controllers Discrete-time PID controllers ON-OFF temperature control with Raspberry Pi and Arduino Uno PID-based temperature control with Raspberry Pi and Arduino Uno PID-based DC motor control with Raspberry Pi and Arduino Uno PID-based water level control with Raspberry Pi and Arduino Uno PID-based LED-LDR brightness control with Raspberry Pi and Arduino Uno
€ 39,95
Membres : € 35,96











-
, par Lobna Belarbi Les offres groupées Raspberry Pi d'Elektor : Des kits pour débutants aux kits avancés
Find the Perfect Raspberry Pi Bundle for Your Skill Level Whether you're a beginner eager to explore the world of Raspberry Pi or an advanced...
