Produits
-

Elektor Digital Elektor Juillet/Août 2025 (PDF) FR
Le téléchargement intégral de ce numéro est disponible pour nos membres GOLD et GREEN sur le site Elektor Magazine ! Pas encore membre ? Cliquez ici. tableau de bord OBD2Des cadrans anciens aux données en temps réel OBD2 : ajoutez un compte-tours et un indicateur de changement de vitesse à votre voitureRétro, mais extrêmement utile capteurs de vision et LiDAR pour la robotique Sensor+Test 2025 et PCIM 2025 mesures sans contact du champ électrique (1)Membrane vibrante pour mesurer des tensions continues ou des champs électriques statiques détecteur de courrier sans filCapteurs optiques, radars… quelques options à explorer Elektor Mini-WheelieUn robot auto-équilibré cellules solairesDrôles de composants, la série premiers pas avec un capteur radar moderneUn capteur précis qui ne passe pas inaperçu sur le vifUsine de papier CybersécuritéDes temps difficiles pour les hackers Infographie : IdO et capteurs le Bluetooth 6.0 pour des applications de télémétrie amélioréesCette nouvelle version offre des fonctions de localisation améliorées découvrez la communication sans fil avec BeagleY-AI Projet 2.0Corrections, mises à jour et courrier des lecteurs démarrer en électronique……Conclusion sur les ampli-op un puissant assistant de codage de l'IAAccélérez votre développement avec Continue et Visual Studio Code contrôleur de charge solaire avec MPPT (2)Le circuit détecteur d'obstacles à ultrasonsUn projet simple pour aider les malvoyants une odyssée de l'IABilan du premier semestre synthétiseur MIDI autonome Raspberry Pi (3)plus intelligent avec une interface utilisateur Meshtastic : un projet de démoUn réseau intelligent de noeuds LoRa générateur analogique de fréquences audioGénérateur de signaux sinusoïdaux de haute qualité à fréquence réglable
€ 10,95
-
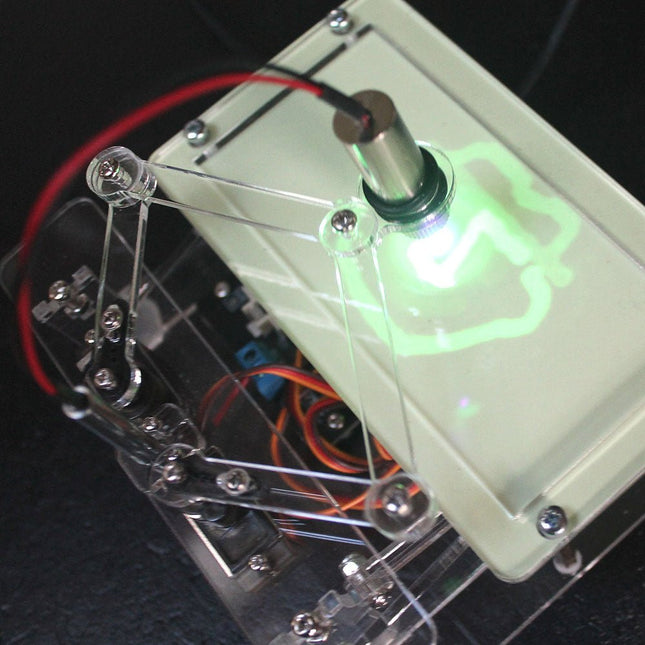
Elektor Labs Upgrade tête laser Elektor pour horloge de sable
La tête laser Elektor transforme l'horloge de sable Elektor dans une horloge qui écrit l'heure sur un film qui brille dans le noir au lieu de sable. En plus d’afficher l’heure, il peut également être utilisé pour créer des dessins éphémères. Le pointeur laser de 5 mW, avec une longueur d'onde de 405 nm, produit des dessins vert vif sur le film qui brille dans le noir. Pour de meilleurs résultats, utilisez le kit dans une pièce faiblement éclairée. Attention : ne regardez jamais directement dans le faisceau laser ! Le kit comprend tous les composants nécessaires, mais la soudure de trois fils est nécessaire. Remarque : Ce kit est également compatible avec l'horloge de sable d'origine basée sur Arduino de 2017. Pour plus de détails, voir Elektor 1-2/2017 et Elektor 1-2/2018.
€ 34,95€ 24,95
Meilleur prix
-

Elektor Digital Elektor Mai/Juin 2020 (PDF)
station météo en réseau ouvert V.21ère partie : présentation et matérielintelligence artificielle pour débutants (1)Reconnaissance d'objets à l'aide de la carte Maixduinocommande universelle de triacs avec ATmegaCommutation et gradation de charges variéesGitHub pour les ±nulsComment télécharge-t-on depuis GitHub ?dessine-moi un bouton pour l'IdOBoutonnière nº 2 : Prototypage entre la matière et◦le nuageMC14500B : microprocesseur CMOS à un seul bitdrôle(s) de composant(s)corrections et mises à jourQuestions et réponsessablier motorisé en BASIC avec ESP8266 et Annex WiFi RDSavec ESP8266 et Annex WiFi RDSbureau d'études – Zone DD comme développement, débrouille et dur-à-cuire ! | Trucs et astuces, bonnes pratiques et autres informations utilesmicrocontrôleurs TMS1000drôle(s) de composant(s)démarrer en électronique (3)… est plus facile qu'on ne l'imagine !le retour des petits circuits... et des bonnes petites pétites d'Elektorboîte inviolable protégée par un témoin d'effractionEnvoyer des données en toute sécurité par la postenouvelle horloge Nixie réviséeUn projet porté par l'enthousiasme de ses utilisateurs, nouveaux et anciensmultitâche en pratique avec l'ESP32 (3)Temporisateurs logicielsSigFox : un renard sur l'internet des objets (4)Composition d'un tableau de bordTMS0280 : synthèse vocaledrôle(s) de composant(s)banc d'essai : Charge électronique USB JOY-iT HD35Pour tester la capacité de charge des ports USBbus CAN + Arduino pour la surveillance des cellules solairesDétecter et localiser les panneaux défectueux dans les grands réseaux photovoltaïquesélectronique analogiqueÉtude de cas n° 1 - section 3 : Optimisation de la réponse du préamplificateur et compromisbruits de laboOscilloscopes anciens et modernesAnalyse de protocole et du décodage de données série à l'aide d'un oscilloscopefonction FFT des oscilloscopesReprésentation du signal dans le domaine spectral avec les oscilloscopes à mémoire numériquedis-moi comment tu ranges ton labo...Visite guidée dans le saint des saintsBanc d'essai : alim de labo PeakTech 6080 AUne alimentation nourrissante à tout petit budgetgrand défi : internet des objets ou internet des déchets ?Des produits sûrs pour l'IdOfréquencemètre 1,2 GHz & générateur de signaux carrés d'Elektor (1992/93)Il a franchi le mur du gigahertzStart-ups : Le programme d'investissement ElektorOser d'abord, doser ensuite – Enregistrez votre start-up !hexadΩku – casse-tête pour elektΩrniciens
€ 10,95
-

Elektor Digital Elektor Mai/Juin 2021 (PDF)
SUPERCHARGEUR LIPO DIYDe l'artisanat au marché de masse60 ANS D'ELEKTORRéflexions sur six décennies d'électroniqueMULTIMÈTRE DE TABLE SIGLENT SDM3045XPINCE AMPÈREMÉTRIQUE POUR COURANT CONTINUCapteur à effet Hall + noyau de ferrite + ArduinoSTATION DE SOUDAGE 2021Facile à construire !PROPELLER 2 DE PARALLAX (2)Environnement de développement et codeWIFI POUR LE NŒUD LORA D'ELEKTORIntegrated in Home Assistant with ESPHomeMODULE CELLULAIREMême pas peur !GESTION DU TEMPS AVEC L'ESP32 ET TOGGLPratiquer le kit ESP32 Basic Core de M5StackCARTE RASPBERRY PI PICO À RP2040MICROPYTHON POUR LES MICROCONTRÔLEURSAfficheur riquiquiCONVERTISSEUR CC/CC 12 À 200 Vpour amplificateurs à tubesTRAQUEUR DE CHALEURCaméra thermique Seek Shot ProPROGRAMMATION ORIENTÉE OBJETUne brève introduction avec le C++DANS L'ANTRE DE…Kurt Diedrich et de son synthétiseur analogiqueJAVA SUR RASPBERRY PIPartie 1: les broches GPIOINTERRUPTEURS DIPCORRECTIONS, MISES À JOUR ET COURRIER DES LECTEURSDU TOUT-JETABLE AU TOUT-RÉPARABLE ?La réponse législative de l'UEPOINT D'OMELETTE SANS CASSER D'ŒUFSLe grand livre des gaffesMICRO-PROFESSORApprentissage de l'assembleur sur Z80DÉMARRER EN ÉLECTRONIQUE… (7)…est moins difficile qu'on ne l'imagine ! Même lorsqu'il s'agit de condensateurs.HEXADOKUcasse-tête pour elektorniciens
€ 10,95
-

Elektor Digital Elektor Mai/Juin 2022 (PDF)
Vos premiers pas avec l'ESP32-C3 et l'IdOBouton Wi-Fi + relais Wi-FiCloud IdO à la sauce ArduinoDétecteur Geiger-Müller à double tube (extension pour Arduino)Capteur très sensible pour très faible rayonnementDétecteur de CO2 : CO2 GuardUne solution « maison » pour surveiller la qualité de l'airKit de mesure de la qualité de l'air pour Raspberry Pi de MonkMakesMesure de température et de CO2eDémarrer en électronique... (13)Entrée en scène de la diodeTrucs et astuces pour tester les composantsSans appareils de test coûteuxRéduction de la consommation d'énergie de votre repousse-taupesGrâce au remplacement du 555 par un ATtiny13Interrupteur crépusculaire DeLuxUne solution pour une commutation de haute précision, commandée par la lumièreLes défis de la commercialisation des solutions IdOProblématiques de sécurité, d'évolutivité et de concurrenceElektor infographieIoT : le nouveau Graal ?« Je préfère quand même être en filaire »Conseils pour développer une interface 1 Gbit/s dans un environnement industrielLa détection d'objets en temps réel pour les microcontrôleurs grâce à Edge Impulse FOMOTubes à ondes progressivesPeculiar Parts, the SeriesNB-IoTNormes, couvertures, conventions et modulesPasserelle intérieure Dragino LPS8Configuration rapide de la passerelle LoRaWANExplorer les microcontrôleurs ATtiny en utilisant le langage C et le langage assembleurExtrait : Ports d'E/S d'ATtinyÉlectronique interactive : projet 2.0Corrections, mises à jour et courriers des lecteursMise à jour de la balise GPS LoRaRecevoir et afficher la localisation à l'aide d'un Raspberry PiSimulation de circuits avec TINA Design Suite & TINACloudExtrait : oscillateurs sinusoïdauxSur le vifFaçon de pincerInfrastructure graphique WinUI pour les applications WindowsApplication de démonstrationCréation d'interfaces graphiques en Python avec guizeroLa pire des interfacesSystèmes solaires autonomesProduction d'électricité indépendante du réseau10 ans avec le même smartphone ?Et si c'était possible !Hexadoku
€ 10,95
-

Elektor Digital Elektor Mai/Juin 2023 (PDF)
Le téléchargement intégral de ce numéro est disponible pour nos membres GOLD et GREEN sur le site Elektor Magazine !Pas encore membre ? Cliquez ici.Super Servo TesterTestez jusqu'à quatre servos, isolés ou in situsignaux analogiques et microcontrôleursCA/N, CN/A, mesure du courant, et plusEmbedded World 2023l'échantillonnage sub-Nyquist en pratiquecapture fiable des hautes fréquences à l'aide du sous-échantillonnageconnecter un smartphone Android à un ESP32 ?projet pratique avec l'API wifi d'Androidfiltre actif 1 kHz pour mesures de distorsionmesures améliorées par l'optimisation du signal de mesuredémarrer en électronique... multivibrationsProjet 2.0corrections, mises à jour et messages de lecteursle nouveau protocole I3Ceffet d'annonce ou vrai progrèsBlueRC : télécommande IR avec smartphone et ESP32adaptative et universellela documentation des microcontrôleurs sans peine (2)registres et schémas de principeautomatisation des tests et des mesuresprogrammation de l'équipement d'essai pour qu'il fasse ce que vous voulezInfographie : test et mesureimmunité contre les surtensionsprotection pour modules de puissance CC/CC non isolésappareil de mesure Wihatesteurs et compteurs d'installation sur lesquels vous pouvez compterautomatisation des tests et partage des résultatssur le vifl'électronique des blocsenregistreur de données énergétiquesmesurer et enregistrer la consommation d'énergieassemblage du kit Rover M.A.R.S. de 4tronixdisque de stationnement avec affichage e-papierune version informatisée innovanteeCO₂ Telegram botmesureur de la qualité de l'air avec notification par Telegramles coulisses de l'audio haut de gamme maisonTon Giesberts d'Elektor interviewé sur l'art de la conception analogiquevisite à domicilenouvelle ciblelecture d'étiquettes RFID et serrure de porte RFIDexemples de projets tirés du guide d'expérimentation pour Arduino d'ElektorSondes de courant RF pour oscilloscopeLa mesure de courants RF sans peinepas pour les mauviettes - kit bras robotiqueavec Raspberry Pi Pico et MicroPythonIA générativeMais qui a fait ça ?Hexadoku
€ 10,95
-
Elektor Digital Elektor Mai/Juin 2024 (PDF)
Le téléchargement intégral de ce numéro est disponible pour nos membres GOLD et GREEN sur le site Elektor Magazine ! Pas encore membre ? Cliquez ici. STM32 Wireless Innovation Design Contest Winners : les gagnants LC mètre en circuitétude de prototype AmpVolt : module de mesure de puissance (1)mesure de la puissance CC et de la consommation énergétique jusqu'à 50 V et 5 A Embedded world 2024 réparation d'équipements électroniquesoutils, techniques et conseils démarrer en électronique...plus de théorie sur les ampli-op un générateur de signaux simplePure synthèse numérique directe Sparkplug en un coup d'œilune spécification pour les données MQTT contrôleur de tube cathodique éclairage à commande radarcomment éclairer automatiquement un escalier en détectant une présence humaine niveau à bulle électronique et disque stroboscopique actif pour platines vinylerégler votre platine vinyle avec cet outil tout-en-un explorer les défis et la valeur commerciale de l’électronique open source le connecteur circulaire codé Aune solution de choix pour les applications industrielles The Arduino-Inside Measurement Labun instrument de test et de mesure 8 en 1 pour le labo d’électronique analyseur de gain-phase avec une carte sonpour les fréquences de 100 Hz à 90 kHz mesure du pH avec l'Arduino UNO R4vérifier la qualité de l'eau sur le vifdouble détente oscilloscope numérique FNIRSI 1014Dde bonnes performances pour des budgets serrés 2024 : l'odyssée de l'IAdétection d'objets générateur de référence 10 MHztrès précis, avec distributeur et isolation galvanique mise à jour #2 : compteur d'énergie basé sur l'ESP32quelques améliorations projet 2.0corrections, Mises à jour, et Courrier des lecteurs entretien avec Eben Upton, PDG de Raspberry PiRaspberry Pi 5 et au delà
€ 10,95
-

Elektor Mai/Juin 2025 (FR)
Le téléchargement intégral de ce numéro est disponible pour nos membres GOLD et GREEN sur le site Elektor Magazine ! Pas encore membre ? Cliquez ici. PbMonitor v1.0Un système de surveillance des batteries pour les applications à onduleurs et de stockage d'énergie contrôleur de charge solaire avec MPPT (1)Principes de base d'un contrôleur de charge solaire pour les systèmes autonomes magnétomètre à intégration du champ et capteurs artisanaux exactitude, ou précision ?vos appareils doivent posséder les deux ! AD7124 : un C/AN de précision en pratiqueFeatures for Sensor Signal Conditioning outil de contrôle PIDOptimisez facilement vos paramètres embedded world 2025 démarrer en électronique...…contrôle de la tonalité Academy Pro BoxLivre + cours en ligne + matériel adaptateur Milliohm-mètreUtilisant la précision de votre multimètre Un nouveau jalon dans le domaine des semi-conducteursEn route vers le 1,4 nm Connecteurs à technologie traversanteLe meilleur des deux mondes : THR fréquencemètrePortable et auto-calibré par GPS compteurs analogiquesDrôles de composants, la série testeur de quartz autonomeQuelle est la précision de votre source d'horloge ? testeur I²C peu couteuxconnecter des appareils I²C directement à votre PC sur le vifbienvenue chez les Pt’tites 2025 : une odyssée de l'IAL'impact transformateur sur le développement de logiciels projet 2.0Corrections, mises à jour, et courrier des lecteurs synthétiseur MIDI autonome Raspberry Pi (2)Améliorons notre configuration avec l’Intelligence oscillateur à pont de Wien "nortonisé"Petite cause, grand effet tester un microcontrôleur à 0,10 $Le microcontrôleur CH32V003 RISC-V et MounRiver Studio en pratique un lecteur audio avec égaliseur basé sur un FPGA (2)Ajout d'un réglage du volume, d'un mixage avancé et d'une interface Web
€ 15,50
-

Elektor Digital Elektor Mai/Juin 2025 (PDF) FR
Le téléchargement intégral de ce numéro est disponible pour nos membres GOLD et GREEN sur le site Elektor Magazine ! Pas encore membre ? Cliquez ici. PbMonitor v1.0Un système de surveillance des batteries pour les applications à onduleurs et de stockage d'énergie contrôleur de charge solaire avec MPPT (1)Principes de base d'un contrôleur de charge solaire pour les systèmes autonomes magnétomètre à intégration du champ et capteurs artisanaux exactitude, ou précision ?vos appareils doivent posséder les deux ! AD7124 : un C/AN de précision en pratiqueFeatures for Sensor Signal Conditioning outil de contrôle PIDOptimisez facilement vos paramètres embedded world 2025 démarrer en électronique...…contrôle de la tonalité Academy Pro BoxLivre + cours en ligne + matériel adaptateur Milliohm-mètreUtilisant la précision de votre multimètre Un nouveau jalon dans le domaine des semi-conducteursEn route vers le 1,4 nm Connecteurs à technologie traversanteLe meilleur des deux mondes : THR fréquencemètrePortable et auto-calibré par GPS compteurs analogiquesDrôles de composants, la série testeur de quartz autonomeQuelle est la précision de votre source d'horloge ? testeur I²C peu couteuxconnecter des appareils I²C directement à votre PC sur le vifbienvenue chez les Pt’tites 2025 : une odyssée de l'IAL'impact transformateur sur le développement de logiciels projet 2.0Corrections, mises à jour, et courrier des lecteurs synthétiseur MIDI autonome Raspberry Pi (2)Améliorons notre configuration avec l’Intelligence oscillateur à pont de Wien "nortonisé"Petite cause, grand effet tester un microcontrôleur à 0,10 $Le microcontrôleur CH32V003 RISC-V et MounRiver Studio en pratique un lecteur audio avec égaliseur basé sur un FPGA (2)Ajout d'un réglage du volume, d'un mixage avancé et d'une interface Web
€ 10,95
-

Elektor Mai/Juin 2026 (FR)
Le téléchargement intégral de ce numéro est disponible pour nos membres GOLD et GREEN sur le site Elektor Magazine ! Pas encore membre ? Cliquez ici. mise à jour du PbMonitor v2.0Surveillance de batterie avec un circuit analogique améliorée mesure de la latence audioUn outil autonome pour évaluer les erreurs et la latence de la transmission audio onde carrée vs. diagramme de BodeVérification des performances d’un appareil audio embedded world 2026 coder intelligemment avec l’IAL’IA dans le développement logiciel pour les électroniciens analyseur audio QA403Une précision accessible pour les professionnels et les amateurs d’audio EasyGimbalAutonomous Camera Tracking with AI, Stepper and Servo Motors carte breakout Sigfox (2)Envoi de messages protection de circuitsContrôle des surtensions avec des diodes TVS tests de batteriesDes approches innovantes à l’aube d’une nouvelle ère diagnostique audiotroniqueUn premier préampli CANopenTermExplorer les réseaux CAN avec un outil open source stabilisation des amplificateurs opérationnelsstabilisation-des-amplificateurs-operationnels projet 2.0Corrections, mises à jour et courrier des lecteurs conditionnement du signalAstuces pour adapter des plages de tension adaptateur TDR pour oscilloscopeLongueur, court-circuit, désadaptation : tester les câbles par réflectométrie ! sur le vifLED It Be oscillateur de haut-parleur et testeur de résonanceUn projet expérimental dédié aux haut-parleurs perspectives de la communauté Elektor sur le test et la mesure carte émetteur-récepteur audio ESP32 (5)Traitement audio et contrôle à distance 2026 : une odyssée de l’IAL’IA a un problème de contexte solutions de stockage par batterie pour installation solaire sur balconPetites batteries, grand impact
€ 16,50
-

Elektor Digital Elektor Mai/Juin 2026 (PDF) FR
Le téléchargement intégral de ce numéro est disponible pour nos membres GOLD et GREEN sur le site Elektor Magazine ! Pas encore membre ? Cliquez ici. mise à jour du PbMonitor v2.0Surveillance de batterie avec un circuit analogique améliorée mesure de la latence audioUn outil autonome pour évaluer les erreurs et la latence de la transmission audio onde carrée vs. diagramme de BodeVérification des performances d’un appareil audio embedded world 2026 coder intelligemment avec l’IAL’IA dans le développement logiciel pour les électroniciens analyseur audio QA403Une précision accessible pour les professionnels et les amateurs d’audio EasyGimbalAutonomous Camera Tracking with AI, Stepper and Servo Motors carte breakout Sigfox (2)Envoi de messages protection de circuitsContrôle des surtensions avec des diodes TVS tests de batteriesDes approches innovantes à l’aube d’une nouvelle ère diagnostique audiotroniqueUn premier préampli CANopenTermExplorer les réseaux CAN avec un outil open source stabilisation des amplificateurs opérationnelsstabilisation-des-amplificateurs-operationnels projet 2.0Corrections, mises à jour et courrier des lecteurs conditionnement du signalAstuces pour adapter des plages de tension adaptateur TDR pour oscilloscopeLongueur, court-circuit, désadaptation : tester les câbles par réflectométrie ! sur le vifLED It Be oscillateur de haut-parleur et testeur de résonanceUn projet expérimental dédié aux haut-parleurs perspectives de la communauté Elektor sur le test et la mesure carte émetteur-récepteur audio ESP32 (5)Traitement audio et contrôle à distance 2026 : une odyssée de l’IAL’IA a un problème de contexte solutions de stockage par batterie pour installation solaire sur balconPetites batteries, grand impact
€ 10,95
-

Elektor Digital Elektor Mars/avril 2020 (PDF)
nœud LORA d'ElektorCommande à distance souple, 868 MHz, à longue portée, avec retour d'état et STM32 embarquémises au point & mises à jourCorrections & Updates || Questions & Answersélectronique analogiqueÉtude de cas n° 1 - Section 2 : Préamplificateur optimisé pour les microphones MEMSdessine-moi un bouton pour l'IdOboutonnière nº 1 : Architecture de l'IdOinterpréteur BASIC pour ESP32 et ESP8266Programmation avec Annex WiFi RDSsonnette ESP32 par Telegram'Le facteur sonne rarement une deuxième fois'retour des petits circuits... et des bonnes petites idées de projets d'ElektorLoRaWAN : décollage facileAvec Blue Pill, passerelle LoRa et The Things Network' Un pilier de l'internet ouvert 'Entretien avec Wienke Giezeman, initiateur du réseau The Thingscarte Meadow F7Une carte pour développeurs .NETmultitâche en pratique avec l'ESP32 (2)Priorités des tâchesSigfox : un renard sur l'internet des objets (3)Vos premiers pas sur l'internet des objetsRaspberry Pi Aide-mémoire des commandes Bashl'accélérateur de démarrage le plus performant d'Europe ?HighTechXL, Eindhoven, Pays-Basbanc d'essai : HAT Enviro+ pour Raspberry PiMesure et collecte de la qualité de l'air avec RPi et le HAT Enviro+expérience vécueCommandes de composants en Ukraine et en Russiebanc d'essai : microscope Andonstar AD407Est-il le meilleur de sa catégorie ?Une soue ? Non, un labo d'électronique !Visite guidée dans le saint des saintsphotosonde pour oscilloscopesMesure de fluctuation de luminosité des systèmes d'éclairageprojet TABULA – des nouveautés tangiblesDe l'importance du retour d'informationcomment calculer le courant de court-circuit présumé ou PSCCet choisir le bon disjoncteurafficheur à LED Monsanto MAN1drôle(s) de composant(s)filtres analogiques à capacités commutéesCeci n'est pas la rubrique Rétronique même si elle s'appuie sur un principe décrit en 1873 !bureau d'études – Zone DD comme développement, débrouille et dur-à-cuire ! Trucs et astuces, meilleures pratiques et autres informations utilesdémarrer en électronique (2)... est plus facile qu'on ne l'imagine !banc d'essai : oscillo de poing 3 en 1 JOY-iT DMSO2D72j'assemble un PC pour mon laboConseils pour le choix des composantsl'ordinateur de jeu d'échecs intelekt d'Elektor (1981)Tiny Chess 86 porté sur l'Intel 8088hexadoku - casse-tête pour elektorniciens
€ 10,95
-

Elektor Digital Elektor Mars/avril 2021 (PDF)
ENTRE UE ET É-U : LE PLAISIR DU PARTAGE DE L'ÉLECTRONIQUEAU SOMMAIRE DE CE NUMÉROVISION ET PASSION D'INGÉNIEUR : L'ÉTINCELLE DU PLAISIRDÉMARRER AVEC MICROMODCOUP DE BAGUETTE MAGIQUE SUR LE JETBOT DE SPARKFUNOu comment j'ai perfectionné mon JetBot, animé par la carte NVIDIA Jetson NanoPROGRAMMATION D'UN FPGAJ'AI CONSTRUIT MA STATION DE GÉOLOCALISATION PAR SATELLITES GNSSGlobal Navigation Satellite SystemCLOCKCLOCK : HORLOGE RÉCURSIVEArduino donne l'heure avec un FPGASOUS LE CAPOT : INVENTOR'S KIT DE SPARKFUNPOINT DE VUE DE GLENN SAMALA, SPARKFUN : NOUVEAU PRODUITS, NOUVELLES ENTREPRISESCIRCUITS IMPRIMÉS SUR MESURE AVEC SPARKFUN À LA CARTERECONNAISSANCE VOCALE AVEC LE MODULE BLE ARTEMISINTRODUCTION À L'ÉCOSYSTÈME QWIIC POUR LE PROTOTYPAGE RAPIDEPOSTER QWIICSOUS LE CAPOT : SUPERCHARGEUR & BOOSTER POUR LIPO EN KITÉLECTRONIQUE MÉMORABLE DU PASSÉ DE SPARKFUNSTATIONNEMENT PARFAIT AVEC LIDARTRÉPANATION D'UN CIRCUIT IMPRIMÉ À PASTILLES INACCESSIBLESCONCEVOIR POUR VENDRE : RTK SURVEYOR DE SPARKFUNHELLO WORLD : RASPBERRY PI PICO ET RP2040Pleins feux sur les premiers microcontrôleur et microprocesseur de Raspberry PiFABRIQUER SOI-MÊME DES ROBOTS À QUATRE PATTESPOSTER - MICROMODDÉVELOPPEMENT D'IDO RISC-V DANS AWS AVEC LES BIBLIOTHÈQUES FREERTOSL'ÉLECTRONIQUE POUR LE PLAISIRConversation entre passionnésUNE SÉLECTION DE PRODUITS SPARKFUNHEXADOKUcasse-tête pour elektorniciens
€ 10,95
-

Elektor Digital Elektor Mars/avril 2022 (PDF)
Construisez votre contrôleur RISC-V Débuter sur le nouveau logiciel RISC-V NEORV32 pour FPGA à faible coût Traceur des graphiques avec Arduino C'est facile avec le traceur sériel d'Arduino Carte CLUE d'Adafruit Une solution intelligente pour les projets IoT Carte pour le Raspberry Pi 400 Protection des entrées/sorties Cartes Raspberry Pi RP2040 chez gogo Approche DIY de la sécurité et de l'espionnage électronique Pilote ou remis à neuf depuis SRAM Identification des compositions Trucs et astuces, bonnes pratiques et informations utiles Interrupteur sans contact DIY Démarrer en électronique? (12) Adaptation d'impédance et transformateurs Qu’en est-il du développement du embarqué ? Rust et mises à jour des déploiements IoT Infographie Les bénéfices de la 5G pour l'industrie et l'automobile Relais à bobine d'allumage mobile Visite à domicile Visite de chacun son Voyage dans les réseaux neuronaux (4e partie) Les neurones embarqués Lévitation magnétique : encore plus simple Troisième version : la plus compacte Programmation d'automates à l'aide du Raspberry Pi et du projet OpenPLC Visualisation des programmes automates avec AdvancedHMI Sur le vif Emballé, c'est pesé Sous votre radar Des micro-contrôleurs que vous devriez connaître Surveillance et débogage sans fil Une solution pour Arduino, ESP32 et Cie Mesurer la température et l'humidité pour mesurer la température Utilisation de modules prêts à l'emploi Réparation de batterie au lithium Économies de l'argent et augmentez la puissance ! Création d'interfaces graphiques en Python Générateur de mèmes Trois questions fondamentales Pourquoi, avec quoi, avec qui ? Hexadoku
€ 10,95
-
Elektor Digital Elektor Mars/avril 2023 (PDF)
Le chargeur intégré est disponible pour nos clients OR et VERT sur le site d'Elektor Magazine ! Pas encore membre ? Cliquez ici . Horloge 2.0 le réveil-matin de vos rêves PIO du RP2040 en pratique expérimentation des programmables E/S du RP2040 ChipTweaker du pauvre homme Nous avons des moyens (abordables) de vous faire parler générateur d'équipement externe avec interface USB deux PICs pour le prix d'un AVR vitamines audio pour micro ramollo Comment gonfler soi-même le levé de sortie d'un microphone FFT avec Maixduino Acquisition des spectres de fréquences sur le vif sans raison apparente pilote de moteurs pas à pas UCN5804 drôle de composant, la série simulation du circuit avec Micro-Cap Les premiers ministres transmettent un problème mondial Prix PAUL 2022 les jeunes talents de la technologie et des solutions créatives Mon première radio définie par logiciel réalisé, dans les 15 minutes la documentation des microcontrôleurs sans peine (1) la structure d'une fiche technique et pour l'IA et les systèmes d'embarquement ? outils, plaques et remplacement des éditeurs numériser une ferme verticale Infographie : embarqué et l'ia d'aujourd'hui et demain Présentation du TinyML Étude de cas KwickPOS Hautes performances pour tous Normes Ordinateur sur module démarrer en électronique Actifs des composants communication I²C avec Node.js et Raspberry Pi affiche des données de vos capteurs dans un navigateur sortie vidéo sur les microcontrôleurs (2) sorties VGA et DVI le système d'exploitation temps réel Metronom un RTOS pour les processeurs AVR DVI sur le RP2040 Entrées de Luke Wren, développeur compositeur avec Raspberry Pi L?afficher HAT Mini Aperçus d'affiches avec Raspberry Pi ! WEEF Awards 2022 : célébrez les bonnes choses Hexadoku
€ 10,95
-

Elektor Digital Elektor Mars/Avril 2024 (PDF)
Le téléchargement intégral de ce numéro est disponible pour nos membres GOLD et GREEN sur le site Elektor Magazine ! Pas encore membre ? Cliquez ici. CaptureCountdétecteur et compteur d'objets basé sur le Raspberry Pi 5 référence de tension avec Arduino Pro Minilinéariser et calibrer les entrées analogiques FPGA pour les débutantsThe Path From MCU to FPGA Programming mise à jour : STM32 Wireless Innovation Design Contest 2024 Bluetooth LE avec MAUIControl Apps for Android & Co. carte d'extension de portsaugmentez le nombre d'E/S de votre carte de développement carte spéciale IAapprentissage automatique avec le Jetson Nano 2024 : l'Odyssée de l'IApremiers essais avec TensorFlow 262 144 façons de jouer au Jeu de la Vieun projet de lecteur en bref sur le vifle souffle du dragon sur mon cou faites tourner votre moteur CCSample Projects from the Elektor Motor Control Development Bundle Adaptateur ESP32-RS-232A Wireless Link for Classic Test Equipment démarrer en électronique…en savoir plus sur les ampli-op bibliothèques ESP recommandées composants piézoélectriques compteur d'objets intelligentreconnaissance d'images simplifiée avec Edge Impulse des solutions à vos problèmes de développement de systèmes embarqués les plus délicats Terminal ESP32un appareil portable avec un écran tactile commencer avec le RTOS Zephyraussi puissant que difficile à maîtriser Award-Winning EthicsDialogue avec Alexander Gerfer, Directeur Technique chez Würth Elektronik eiSos sur la promotion du comportement respectueux et innovant projet 2.0corrections, mises à jour et courrier des lecteurs
€ 10,95
-

Elektor Mars/Avril 2025 (FR)
Le téléchargement intégral de ce numéro est disponible pour nos membres GOLD et GREEN sur le site Elektor Magazine ! Pas encore membre ? Cliquez ici. L'architecture de processeur open-source RISC-V16 cartes et MCU à connaître un lecteur audio avec égaliseur basé sur un FPGAMixage audio numérique avec un Arduino MKR Vidor 4000 tête laser pour l’horloge de sable basé sur Raspberry Pi PicoDessiner avec la lumière participez au concours STM32 Edge AI système de contrôle environnemental multi-capteurs pour les plantesMesure sans fil de l'approvisionnement en eau et de la luminosité porte automatique contrôlée par l'IA et MaixduinoReconnaissance faciale avec une caméra l’électronique embarquée en 2024L’IA va redéfinir l’industrie Calcul en mémoire basé sur la charge chez EnCharge AI des opérations d'IA avec 10 fois moins d'énergie et des coûts divisés par 20 Une carte pour le développement et l’entraînement des modèles ML d’analyse des vibrations Elektor Mini-WheelieKit robot gyropode (robot autostabilisé) MCUViewerMCUViewer outil de débogage open source multiplateforme isolateur USB 2.0Isolation éléctrique pour les périphériques USB anticipation et actionApplication pratique de la maintenance prédictive SPoE – compatibilité électromagnétiquePaire unique avec Power-over-Ethernet à travers les yeux d'EMC rétro-techCréer un monde nouveau avec la télévision couleur surveillance ECGavec des modules Hexabitz et STM32CubeMonitor la bataille pour l’IA en périphérie HaLow atteint une distance Wifi record de 16 km à 900 MHz première puce embarquée CHERI RISC-V et programme d'accès anticipé la détection des incendies de forêt de troisième génération utilise des liaisons satellites sur le vifDélices et supplices du choix démarrer en électronique......Filtrage et contrôle de la tonalité Kit d'horloge quasi-analogiqueNouvelle version d'un classique d'Elektor une approche modulaire de test des capteursCarte de test de capteurs basée sur l'ESP32-S3 2025 : une odyssée de l'IAL'essor des modèles de fondation et leur impact sur l'accessibilité de l'IA Synthétiseur MIDI autonome Raspberry Pi (1)Préparation d'une plateforme pour des expériences d’IA en périphérie projet 2.0Corrections, mises à jour et courrier des lecteurs Le RISC-V AI, un processeur à tout faire : CPU, GPU, DSP, FPGA paroles de PDG : fraîcheur, silence et finesse programmation Dual-Core avec le Raspberry Pi PicoLe monde de la programmation parallèle
€ 15,50
-

Elektor Digital Elektor Mars/Avril 2025 (PDF) FR
Le téléchargement intégral de ce numéro est disponible pour nos membres GOLD et GREEN sur le site Elektor Magazine ! Pas encore membre ? Cliquez ici. L'architecture de processeur open-source RISC-V16 cartes et MCU à connaître un lecteur audio avec égaliseur basé sur un FPGAMixage audio numérique avec un Arduino MKR Vidor 4000 tête laser pour l’horloge de sable basé sur Raspberry Pi PicoDessiner avec la lumière participez au concours STM32 Edge AI système de contrôle environnemental multi-capteurs pour les plantesMesure sans fil de l'approvisionnement en eau et de la luminosité porte automatique contrôlée par l'IA et MaixduinoReconnaissance faciale avec une caméra l’électronique embarquée en 2024L’IA va redéfinir l’industrie Calcul en mémoire basé sur la charge chez EnCharge AI des opérations d'IA avec 10 fois moins d'énergie et des coûts divisés par 20 Une carte pour le développement et l’entraînement des modèles ML d’analyse des vibrations Elektor Mini-WheelieKit robot gyropode (robot autostabilisé) MCUViewerMCUViewer outil de débogage open source multiplateforme isolateur USB 2.0Isolation éléctrique pour les périphériques USB anticipation et actionApplication pratique de la maintenance prédictive SPoE – compatibilité électromagnétiquePaire unique avec Power-over-Ethernet à travers les yeux d'EMC rétro-techCréer un monde nouveau avec la télévision couleur surveillance ECGavec des modules Hexabitz et STM32CubeMonitor la bataille pour l’IA en périphérie HaLow atteint une distance Wifi record de 16 km à 900 MHz première puce embarquée CHERI RISC-V et programme d'accès anticipé la détection des incendies de forêt de troisième génération utilise des liaisons satellites sur le vifDélices et supplices du choix démarrer en électronique......Filtrage et contrôle de la tonalité Kit d'horloge quasi-analogiqueNouvelle version d'un classique d'Elektor une approche modulaire de test des capteursCarte de test de capteurs basée sur l'ESP32-S3 2025 : une odyssée de l'IAL'essor des modèles de fondation et leur impact sur l'accessibilité de l'IA Synthétiseur MIDI autonome Raspberry Pi (1)Préparation d'une plateforme pour des expériences d’IA en périphérie projet 2.0Corrections, mises à jour et courrier des lecteurs Le RISC-V AI, un processeur à tout faire : CPU, GPU, DSP, FPGA paroles de PDG : fraîcheur, silence et finesse programmation Dual-Core avec le Raspberry Pi PicoLe monde de la programmation parallèle
€ 10,95
-

Elektor Mars/Avril 2026 (FR)
Le téléchargement intégral de ce numéro est disponible pour nos membres GOLD et GREEN sur le site Elektor Magazine ! Pas encore membre ? Cliquez ici. programmation PIO sur le Raspberry Pi PicoNeuf instructions, de multiples possibilités l'IA en ligne de commandeDéveloppement, compilation et validation de projets embarqués depuis le terminal le Scrutiny DebuggerDéboguer, visualiser et tester du code C/C++ embarqué carte breakout Sigfox (1)Développement d’une BoB radio alimentation à faible bruit (2)Construction, assemblage et mise en œuvre pratique générateur de signaux simple basé sur le RP2040Signaux analogiques et numériques à la découverte du futur de la domotique avec Matter et l’IA EdgeLes dernières versions de Matter et l’essor de l’IA en périphérie de réseau (edge) donnent-ils enfin aux ingénieurs les outils nécessaires pour construire les maisons intelligentes et parfaitement intégrées promises aux utilisateurs ? capteurs de pression différentielleLa maintenance prédictive appliquée aux systèmes CVC la sécurité dès la conceptionPrincipes d’ingénierie pour limiter les défaillances la sécurité des systèmes embarqués n’est plus une option la CRA et la PQC redéfinissent les priorités de la sécurité embarquéePourquoi même les petites entreprises IoT et industrielles doivent prévoir une mise à niveau embedded world 2026Entretien avec Benedikt Weyerer, directeur d’embedded world prise en main du bus I3CUtilisation de matériel de ST et Microchip le projet BLEnkyPrototypage rapide d’applications Bluetooth Low Energy modulation de largeur d’impulsionDu thermostat tout ou rien à un signal analogique continu filtré audiotroniqueDes circuits audio agréables à l’écoute, à réaliser soi-même sur le vifLisez donc le manuel ! carte émetteur-récepteur audio ESP32 (4)Réglage des horloges et une option filaire 2026 : une odyssée de l’IAConséquences du vibe coding charge CC symétriqueCharge CC symétrique, statique ou dynamique comptage de visages avec MaixCAMUne méthode simple pour estimer la taille d’un public
€ 16,50
-

Elektor Digital Elektor Mars/Avril 2026 (PDF) FR
Le téléchargement intégral de ce numéro est disponible pour nos membres GOLD et GREEN sur le site Elektor Magazine ! Pas encore membre ? Cliquez ici. programmation PIO sur le Raspberry Pi PicoNeuf instructions, de multiples possibilités l'IA en ligne de commandeDéveloppement, compilation et validation de projets embarqués depuis le terminal le Scrutiny DebuggerDéboguer, visualiser et tester du code C/C++ embarqué carte breakout Sigfox (1)Développement d’une BoB radio alimentation à faible bruit (2)Construction, assemblage et mise en œuvre pratique générateur de signaux simple basé sur le RP2040Signaux analogiques et numériques à la découverte du futur de la domotique avec Matter et l’IA EdgeLes dernières versions de Matter et l’essor de l’IA en périphérie de réseau (edge) donnent-ils enfin aux ingénieurs les outils nécessaires pour construire les maisons intelligentes et parfaitement intégrées promises aux utilisateurs ? capteurs de pression différentielleLa maintenance prédictive appliquée aux systèmes CVC la sécurité dès la conceptionPrincipes d’ingénierie pour limiter les défaillances la sécurité des systèmes embarqués n’est plus une option la CRA et la PQC redéfinissent les priorités de la sécurité embarquéePourquoi même les petites entreprises IoT et industrielles doivent prévoir une mise à niveau embedded world 2026Entretien avec Benedikt Weyerer, directeur d’embedded world prise en main du bus I3CUtilisation de matériel de ST et Microchip le projet BLEnkyPrototypage rapide d’applications Bluetooth Low Energy modulation de largeur d’impulsionDu thermostat tout ou rien à un signal analogique continu filtré audiotroniqueDes circuits audio agréables à l’écoute, à réaliser soi-même sur le vifLisez donc le manuel ! carte émetteur-récepteur audio ESP32 (4)Réglage des horloges et une option filaire 2026 : une odyssée de l’IAConséquences du vibe coding charge CC symétriqueCharge CC symétrique, statique ou dynamique comptage de visages avec MaixCAMUne méthode simple pour estimer la taille d’un public
€ 10,95
-
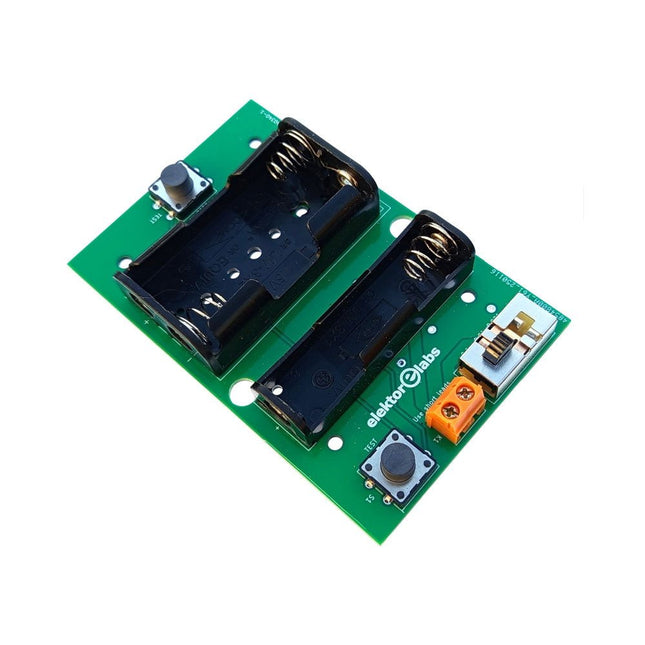
Elektor Labs Adaptateur milliohmmètre Elektor
L'adaptateur milliohmmètre Elektor utilise la précision d'un multimètre pour mesurer des valeurs de résistance très faibles. Il convertit une résistance en tension mesurable avec un multimètre standard. L'adaptateur milliohmmètre Elektor permet de mesurer des résistances inférieures à 1 mΩ grâce à la méthode 4 fils (Kelvin). Il est utile pour localiser les courts-circuits sur les circuits imprimés. L'adaptateur dispose de trois plages de mesure : 1 mΩ, 10 mΩ et 100 mΩ, sélectionnables via un interrupteur à glissière. Il intègre également des résistances d'étalonnage. L'adaptateur milliohmmètre Elektor est alimenté par trois piles AA de 1,5 V (non fournies). Spécifications Gammes de mesure 1 mΩ, 10 mΩ, 100 mΩ, 0,1% Alimentation 3x piles AA 1,5 V (non fournies) Dimensions 103 x 66 x 18 mm (compatible avec le boîtier de type Hammond 1593N, non fourni) Spécificité Résistances d'étalonnage intégrées Téléchargements Documentation
€ 34,95
Membres : € 31,46
-

Elektor Digital Elektor novembre/décembre 2020 (PDF)
NOUVEAU LCR-MÈTRE 50 HZ - 2 MHZpont de mesure d'impédance automatique pour mesurer la résistance, la capacité et l'inductance des composants ayant une impédance de 10 mΩ à 100 MΩCONNECTEZ VOTRE SONNETTE À L'INTERNET DES OBJETSavec Home Assistant et ESPHomeCOMMENT BIEN GÉRER MES BATTERIES ?Qui veut aller loin ménage son lithiumDÉMARRER EN ÉLECTRONIQUE (5)…est moins difficile qu'on ne l'imagine !ELLES SONT PETITES, MAIS FONT DE GRANDES CHOSESLes pépites d'ElektorFRITZING◦: GRAPHISME D'IMPLANTATION SUR PLAQUES D'ESSAISCONCEPTION DE FILTRES ANALOGIQUES (2)Filtres actifsDIS-MOI COMMENT TU RANGES TON LABO...Visite guidée dans le saint des saintsBUREAU D'ÉTUDES - ZONE DD comme développement, débrouille et dur-à-cuire Trucs et astuces, bonnes pratiques et autres informations utilesBANC D'ESSAI : OSCILLO À 4 VOIES RIGOL DS1054ZBOUGIE DE NOËL ÉLECTRONIQUESoufflez-la comme une vraie !GÉNÉRATEUR SINUSOÏDAL ACCORDABLE À TUBESLe retour du rétroBANC D'ESSAI : GÉNÉRATEUR DDS RIGOL DG4162GREFFONS ET MODULES DE KICADSONDE DE COURANT DIFFÉRENTIELLE POUR OSCILLO – 2.0Mesurer les courants avec l'oscilloscopeRÉTRONIQUE : LA BOUCLE D'INTERFACE HEWLETT-PACKARDConnecter le monde (en 1981) !APPRENTISSAGE AUTOMATIQUE : UN BEL AVENIREntretien avec Daniel SitunayakeAPPLICATIONS MOBILES POUR ANDROID ET IOSà partir d'un moule uniqueSUR LE VIFProfessions en déficit de main d'oeuvre5G : QUI FAÇONNE QUI, LES INFRASTRUCTURES OU LA SOCIÉTÉ ?La question n'est pas anodine, les conséquences non plusMULTITÂCHE EN PRATIQUE AVEC L'ESP32 (5)Notification d'événements de tâchesOSCILLATEUR HP 10811Un drôle de composant drôlement précisBALISE GPS LORAMatériel et logiciel libres et ouvertsJE PROGRAMME AVEC DES AUTOMATES FINISen assembleur et en C sur des PIC à 8 bitsHEXADOCU
€ 10,95
-

Elektor Digital Elektor Novembre/Décembre 2021 (PDF)
TRAITEMENT D'IMAGES AVEC LE KIT JETSON NANO DE NVIDIA2e partie : reconnaissance d'imagesELEKTOR JUMPSTARTER – DU NOUVEAUCampagnes à venirTRACEUR GPS À CODE SOURCE OUVERTTraccar cartographie les déplacements de véhicules, sans recours à un serveur tiers du nuageTESTEUR MULTIFONCTION LCR-T7 DE JOY-ITTest de semi-conducteurs passifs, discrets et de télécommandes IRSYNTHÉTISEUR DE BRUITDu bruit à la musique avec le PRBSynth1DÉMARRER EN ÉLECTRONIQUE…Easier than Imagined! ... Continuing with the CoilVOYAGE DANS LES RÉSEAUX NEURONAUX (2E PARTIE)Les neurones logiquesPROBLÈMES DE SÉCURITÉ ? COMBATTEZ LE FEU PAR LE FEU !Extension à mémoire analogique, protégée par ampoule de flash, pour la boîte à témoin d'effractionKIT DU LCR-MÈTRE 2 MHZ D'ELEKTORBALISES BLUETOOTH : LA PRATIQUEGéolocalisation intra murosC PROGRAMMING ON RASPBERRY PIExtrait : communiquer par Wi-FiTEST DE PRÉCONFORMITÉ CEM POUR UN PROJET ALIMENTÉ EN COURANT CONTINUPartie 2 : le matériel et son utilisationPROPELLER 2 DE PARALLAX (5)La fonction de « broche intelligente »MODBUS SANS FIL (PARTIE 1)Matériel et programmationJUNIOR COMPUTEREn forme après 40 ans de sommeilCONSTRUIRE SON PROPRE ÉTALONNEUR DE HAUTE PRÉCISION−10 V à +10 V, 0 à 40 mA, 0,001 %ARDUINO NANO RP2040 CONNECT EN DÉTAILRaspberry Pi RP2040 + Wi-Fi + BluetoothLE CORPS PHYSIQUE DE L'INTELLIGENCE ARTIFICIELLEPROJET 2.0corrections, mises à jour et courriers des lecteursCRÉATION D'INTERFACES GRAPHIQUES EN PYTHON AVEC GUIZEROInstallez la bibliothèque Python guizero et créez vos propres interfaces graphiques.KIT DE MESURE DU CO2 POUR SALLE DE CLASSEMontage à base d'ESP8266, conçu par l'Université des Sciences Appliquées d'Aix-la-ChapelleMK484, RADIORÉTRO PO/GO...Toujours le plaisir de construire !60 ANS D'ELEKTORQue la lumière soit !HEXADOKUThe Original Elektorized Sudoku
€ 10,95
-

Elektor Digital Elektor Novembre/Décembre 2022 (PDF)
Le téléchargement intégral de ce numéro est disponible pour nos membres GOLD et GREEN sur le site Elektor Magazine !Pas encore membre ? Cliquez ici.Le haut de gamme au cœur du labo ElektorAmplificateur haut de gamme Fortissimo-100Étage de sortie audio entièrement symétrique avec 100/190 WVérification de la fréquence des quartz et des circuits accordésAstuces, bonnes pratiques et autres informations utilestrucs et astuces pour circuits impriméssouder - et alors ?un regard approfondi sur la technologie de soudage modernecommande de porte de garage par Bluetooth à réponse rapideOuvrez votre porte avec votre smartphonecontrôleur de diode idéalecircuits à diodes à faible dissipation de puissanceguirlandes de LED avec ESP32 et FreeRTOSclignotantes et scintillantesdémarrer en électronique...avec plaisir, on continue avec les Zenerrécepteur FM/DAB+le meilleur des deux mondessur le vifElectronica Obscuraprocédé sans fil de débogage de micrologicielsTampon circulaire et serveur web sur l'ESP32Le COVID-19 a-t-il donné un coup de fouet à l'innovation en ingénierie ?Composants et solutions innovants de 2022Ersa i-CON TRACE – la station de soudage connectée pour professionnelsInfographiquesqu'allons-nous faire de toute cette informatique ?Comment piloter l'afficheur E-Paper d'Ynvisibleinnovation de tous les instants chez InnoFaithentretien avec Walter Arkesteijnautomatisation industriellerétrofit IdO facile et évolutifQt pour le Raspberry Piguide pas à pas pour la configuration du framework d'interface graphique utilisateurLes connecteurs linéaires ultra-plats facilitent la gestion de données multi-signauxintelligents - innovants - rentablesles FPGA GateMate conçus et fabriqués en Allemagnedes outils pour soutenir le développement de capteurs à faible coûtfusible réarmable CTPdrôle de composant, la sérieSortie analogique isolée pour Arduino Unovisite à domicile… Découvre le Thérémineelectronica fast forward 2022 — une initiative d'Elektoréquipe et calendrierradiogoniométrieretrouver les capteurs météo sans fil égarésestimer le bruit interne d'un circuit intégréméthode simpleQuestions d'éthiqueInitié par le WEEFÉthique et profit, un mariage de raisonEntretien avec le professeur Stefan Heinemannl'index WEEF 2023logiciel de calcul de filtresOutils de conception de filtres analogiquesÉteins-moi cette télé !avec TV-B-GoneMesure de la qualité de l'air avec le RP2040elekterminalInitiation à Python 3extrait du chapitre : bibliothèque Wand et traitement numérique des imagesSOLARPUNKun avenir prometteurHexadoku
€ 10,95























