














Cette catégorie offre un large éventail de plateformes parmi lesquelles choisir. Ils ont tous des fonctionnalités différentes et vous pouvez choisir la plateforme qui correspond le mieux à vos besoins ou à votre projet.
Plateformes
-

FLUX Découpeur laser FLUX Ador (20 W)
FLUX Ador est la première découpeuse laser à impression couleur au monde. Alimenté par trois modules interchangeables de haute qualité, Ador vous permet de graver et de découper une large gamme de matériaux tout en rehaussant vos projets avec une touche de couleur. Nouveau potentiel créatif avec Ador Que vous soyez un éducateur, une petite entreprise, un artisan ou un designer, avec Ador, c'est à vous de définir les limites de l'application. Facile à utiliser Placer le matériel puis faire la mise au point automatique Faites glisser et déposez votre conception Graver, découper ou imprimer Projet terminé ! Grand espace de travail, grandes idées Ador offre un grand espace de travail de 430 x 300 mm, avec une profondeur de 30 mm, élargissant les horizons de votre créativité. Caractéristiques Dimensions 637 x 488 x 226 mm Poids 19 kg Espace de travail X&Y : 20 W Laser à diode : 430 x 300 mm (X & Y varie selon les différents modules) Z : 30 mm (pour tous les modules) & 20 mm (avec prisme) Zone d'aperçu de la caméra Zone de travail entière Tension CA 110-240 V Ecran tactile Oui, 8 pouces (diagonale) Caméra 8 MP IO USB/Wi-Fi Spécifications laser Module laser à diode W Vitesse de déplacement du laser 0~400 mm/s Épaisseur de découpe laser Varie pour différents matériaux Mode logiciel Vectoriel/Graphique (monochrome, échelle de gris) Système opérateur Windows/MacOS/Linux Type de fichier logiciel JPG/PNG/SVG/DXF Inclus FLUX Ador Module laser à diodes 20W 6x prisme élévateur Adaptateur secteur Cordon d'alimentation Clé hexagonale Tuyau de type Collier de serrage pour tuyau de ventilation Éprouvette en bois Lubrifiant pour découpe laser Téléchargements Micrologiciel
€ 1.935,00
Meilleur prix
-

Elektor Labs Analyseur logique USB (8 voies, 24 MHz)
Cet analyseur logique USB est un analyseur logique à 8 voies avec chaque entrée à double usage pour l'enregistrement de données analogiques. Idéal pour le débogage et l'analyse de signaux tels que I²C, UART, SPI, CAN et 1-Wire. Il fonctionne en échantillonnant une entrée numérique connectée à un dispositif en test (DUT) à une fréquence d'échantillonnage élevée. La connexion au PC se fait via USB. Spécifications Voies 8 voies numériques Fréquence d'échantillonnage maximale 24 MHz Tension d'entrée maximale 0 V ~ 5 V Température de fonctionnement 0°C ~ 70°C Impédance d'entrée 1 MΩ || 10 pF Protocoles pris en charge I²C, SPI, UART, CAN, 1-Wire, etc. Connexion au PC USB Dimensions 55 x 28 x 14 mm Inclus Analyseur logique USB (8 voies, 24 MHz) Câble USB Nappe de fils de liaison Téléchargements Logiciel
€ 19,95
Membres : € 17,96
-

QuantAsylum QuantAsylum QA403 Analyseur Audio 24 bits
Le QA403 est le quatrième générateur d'analyse audio de QuantAsylum. Le QA403 étend les fonctionnalités du QA402 avec une meilleure performance de bruit et de distorsion, en plus d'une réponse plus plate aux extrémités de bande. Sa taille compacte signifie que vous pouvez l'emporter presque partout. Caractéristiques ADC/DAC 24 bits Jusqu'à 192 kS/s Totalement isolé du PC Entrée/Sortie différentielle Alimenté par USB Atténuateur intégré Démarrage Rapide et Sans Pilote Le QA403 est un périphérique USB sans pilote, ce qui signifie qu'il est prêt dès que vous le branchez. Le logiciel est gratuit et il est rapide et facile de déplacer le matériel d'une machine à l'autre. Donc, si vous devez vous rendre à l'usine pour résoudre un problème ou emmener le QA403 chez vous pour une journée de travail à domicile, vous pouvez le faire sans tracas. Conception Sans Étalonnage Le QA403 est livré avec un étalonnage d'usine dans sa mémoire flash, assurant une performance cohérente d'une unité à l'autre. Sur votre ligne de production, vous pouvez installer un autre QA403 et être sûr que ce que vous lisez sur une unité sera très similaire à la suivante. Il n'est pas prévu que l'étalonnage soit nécessaire à intervalles réguliers. Mesures Faire des mesures de base est rapide et facile. En quelques clics, vous comprendrez la réponse en fréquence, la THD(+N), le gain, le rapport S/B, etc., de votre dispositif en test. Plage Dynamique Le QA403 offre 8 plages de gain en entrée (0 à +42 dBV en 6 paliers) et 4 plages de gain en sortie (-12 à +18 dBV en paliers de 10 dB). Cela garantit des performances constantes sur des plages très étendues de niveaux d'entrée et de sortie. L'entrée CA maximale du QA403 est de +32 dBV = 40 Veff. Le courant continu maximum est de ±40 V et le courant CA maximum + CC = ±56 V. Facilité de Programmation Le QA403 prend en charge une interface REST, ce qui facilite l'automatisation des mesures dans presque tous les langages que vous pourriez anticiper. De Python à C++ en passant par Visual Basic, si vous savez comment charger une page web dans votre langage préféré, vous pouvez contrôler le QA403 à distance. Les mesures sont rapides et réactives, avec généralement des dizaines de commandes traitées par seconde. Isolé et Alimenté par USB Le QA403 est isolé du PC, ce qui signifie que vous mesurez votre DUT (Device Under Test) et que vous ne suivez pas des boucles de masse fantômes. Le QA403 est alimenté par USB, comme presque tous nos instruments. Si vous configurez à distance, ajoutez un hub alimenté dans votre sac et votre configuration de test complète peut fonctionner avec un minimum de câbles. Au Revoir Carte Son, Bonjour QA403 Marre d'essayer de faire fonctionner une carte son ? Le cauchemar de l'étalonnage ? Le manque d'étages de gain ? La puissance limitée ? En avez-vous assez de traiter avec des plages d'entrée fixes ? La crainte de la détruire avec trop de courant continu ou alternatif ? Assez des boucles de masse ? C'est pourquoi QuantAsylum a construit le QA403. Spécifications Dimensions 177 x 44 x 97 mm (L x H x P) Poids 435 g Matériau du boîtier Aluminium avec revêtement en poudre (panneau avant de 2 mm d'épaisseur, dessus/dessous de 1.6 mm d'épaisseur) Téléchargements Datasheet Manual GitHub
-

Elektor Labs Carte de formation Elektor Arduino Nano MCCAB
La carte d'apprentissage Elektor Arduino Nano MCCAB contient tous les composants (avec Arduino Nano) nécessaires aux exercices, tels que des diodes électroluminescentes, des interrupteurs, des boutons-poussoirs, des émetteurs de signaux acoustiques, etc. Ce système de formation à microcontrôleur permet également d'interroger ou de commander des capteurs, des moteurs ou des assemblages externes. Spécifications (Carte de formation Arduino Nano MCCAB) Alimentation électrique Via la connexion USB du PC connecté ou un bloc d'alimentation externe (non inclus) Tension de fonctionnement +5 Vcc Tension d'entrée Toutes les entrées 0 V to +5 V VX1 and VX2 +8 V to +12 V (uniquement en cas d'utilisation d'une alimentation externe) Périphérie du matériel LCD 2x16 caractères Potentiomètre P1 & P2 JP3 : sélection de la tension de fonctionnement de P1 et P2 Distributeur SV4 : Distributeur pour les tensions de fonctionnementSV5, SV6 : Distributeur pour les entrées/sorties du microcontrôleur Interrupteurs et boutons Bouton RESET sur le module Arduino Nano 6x interrupteurs à bouton poussoir K1 ... K6 6x interrupteurs à glissière S1 ... S6 JP2 : Connexion des interrupteurs avec les entrées du microcontrôleur Buzzer Buzzer piézo Buzzer1 avec cavalier sur JP6 Voyants lumineux 11 x LED : Indicateur d'état des entrées/sorties LED L sur le module Arduino Nano, connectée au GPIO D13 JP6 : Connexion des LED LD10 ... LD20 avec les GPIO D2 ... D12 Interfaces sérieSPI ET I²C JP4 : Sélection du signal à la broche X du connecteur SPI SV12 SV9 à SV12 : interface SPI (3,3 V/5 V) ou interface I²C Sortie de commutation pour les appareils externes SV1, SV7 : sortie de commutation (maximum +24 V/160 mA, alimentation externe) SV2 : 2x13 connecteurs pour la connexion de modules externes Matrice de 3x3 LED(9 LED rouges) SV3 : Colonnes de la matrice LED 3x3 (sorties D6 ... D8) JP1 : Connexion des lignes avec les GPIOs D3 ... D5 Logiciel Bibliothèque MCCABLib Contrôle des composants matériels (interrupteurs, boutons, DEL, matrice de DEL 3x3, buzzer) sur la carte de formation MCCAB. Température de fonctionnement Jusqu'à +40 °C Dimensions 100 x 100 x 20 mm Spécifications (Arduino Nano) Microcontrôleur ATmega328P Architecture AVR Tension de fonctionnement 5 V Mémoire flash 32 Ko, dont 2 Ko utilisés par le chargeur de démarrage SRAM 2 KB Vitesse d'horloge 16 MHz Connecteurs d'entrée analogique 8 EEPROM 1 KB Courant continu par connecteur d'E/S 40 mA sur un connecteur d'E/S, maximum total de 200 mA sur l'ensemble des connecteurs Tension d'entrée 7-12 V Connecteurs E/S numériques 22 (dont 6 PWM) Sortie PWMt 6 Consommation électrique 19 mA Dimensions 18 x 45 mm Poids 7 g Inclus 1x Elektor Arduino Nano Training Board MCCAB 1x Arduino Nano
€ 79,95
Membres : € 71,96
-

Paggen Werkzeugtechnik SMD Starter I – Ligne de production pour prototypes
La ligne de production de prototype SMD Starter I se compose de l'imprimante de pochoir TSD240, du dispositif de placement CMS PlaceMAN et du four de refusion 3LHR10. Imprimante de pochoir SD240 (+ Raclette métallique 155 mm) Dimensions du pochoir : max. 175 x 255 mm Dimensions de la carte de circuit imprimé : max. 180 x 240 mm Dimensions : 410 x 270 x 110 mm Poids : 6,7 kg Comprend une raclette métallique de 155 mm Comprend 8 aimants pour maintenir la carte de circuit imprimé, dont 6 avec vis M3 Dispositif manuel de placement CMS PlaceMAN pour composants standard incl. pompe à vide (sans alimentateurs, caméra, moniteur et distributeur) Équipé d'un bras de placement à mouvement fluide, d'une tête de placement à fonctionnement d'une main, de rotation de l'axe Z et d'une coupure automatique du vide, avec porte-carte de circuit imprimé, unité d'aspiration et 2 aiguilles de placement avec ventouses en caoutchouc. Capacité des alimentateurs (non inclus) 2x cassette d'alimentation pour rouleaux de 10 x 8 mm à gauche 4x cassette d'alimentation pour alimentateurs de tiges pour 5 tiges chacun D'autres systèmes d'alimentation sont possibles dans la zone d'assemblage, par exemple le système enfichable à alimentation par bande Dimensions Unité de base (LxlxH) : 765 x 390 x 210 mm Avec cassette d'alimentation pour rouleaux de 10 x 8 mm (LxlxH) : 765 x 390 x 210 mm Avec cassette d'alimentation pour rouleaux de 10 x 8 mm et cassette d'alimentation pour alimentateur de tiges (LxlxH) : 765 x 430 x 210 mm (la hauteur peut varier en fonction de la longueur des tiges) Avec cassette d'alimentation pour rouleaux de 10 x 8 mm incl. support pour 10 rouleaux et cassette d'alimentation pour alimentateur de tiges (LxlxH) : 765 x 430 x 210 mm (la hauteur peut varier en fonction de la longueur des tiges) Spécifications Poids de l'unité de base : environ 6 kg Déplacement des axes (x, y, z) : 470 x 230 x 15 mm Zone de travail maximale : 380 x 240 mm Dimensions maximales de la carte de circuit imprimé : 230 x 360 mm Alimentation électrique : 230/12 V, 800 mA Alimentation de la pompe à vide : 230 V, 6 W Four de refusion 3LHR10 (programmable pour la soudure sans plomb avec tiroir manuel et contrôle par tablette) Four de refusion avec chauffage IR et convection. La convection à air chaud forcé garantit un profil de température uniforme dans la chambre. Après avoir ouvert manuellement la porte, les ventilateurs s'allument et la carte de circuit imprimé soudée est refroidie rapidement. Four de refusion compact avec porte manuelle Prêt pour l'industrie 4.0, communication Bluetooth + tablette Chauffage IR + convection Application Android pour se connecter à une tablette ou un smartphone 100 programmes utilisateur différents Contenu de la livraison : 3LHR10, tablette avec application, couverture de protection pour la tablette, 4 porte-cartes de circuit imprimé, thermocouple externe, manuel sur la tablette Application Connectez le four à l'alimentation électrique et raccordez le système d'extraction en option (3LFE10S) au conduit d'évacuation d'air. Lors de la première mise en marche, le four recherchera une tablette ou un smartphone. Lorsque les deux sont connectés à l'application Android, choisissez la programmation du four. Ici, la température programmable et le temps de préchauffage, ainsi que la température et d'autres données, doivent être définis. Enregistrez-vous avec la tablette pour utiliser toutes les fonctionnalités du logiciel. Si le four est déjà programmé, l'utilisateur peut contrôler le fonctionnement avec les boutons et l'écran sur le panneau avant. Lorsque le processus de refusion est terminé, un signal sonore retentit. Un signal s'affiche également sur la tablette/smartphone. Le tiroir doit maintenant être ouvert manuellement. L'application Android affiche l'état du processus, le temps et la température, ou d'autres informations. Spécifications Alimentation électrique : 230 V, 50 Hz Puissance maximale : 3100 W Températures : 50-260°C Dimensions : 510 x 370 x 340 mm Poids maximal : 16 kg Dimensions de la grille : 350 x 220 mm Dimensions maximales de la carte de circuit imprimé : 300 x 200 mm Hauteur maximale des composants sur la carte de circuit imprimé : 50 mm en haut, 30 mm en bas Contenu de la livraison Imprimante de pochoir TSD240 Dispositif de placement CMS PlaceMAN Four de refusion 3LHR10
€ 6.549,00
Meilleur prix
-

Elektor Labs Horloge de sable Elektor pour Raspberry Pi Pico
Accroche-regard basé sur Raspberry Pi Une horloge à sable standard ne fait qu'indiquer le temps qui passe. En revanche, cette horloge à sable contrôlée par le Raspberry Pi Pico indique l'heure exacte en 'gravant' les quatre chiffres de l'heure et des minutes dans la couche de sable. Après un temps réglable, le sable est aplati par deux moteurs vibrants et tout recommence. Au cœur de l'horloge de sable se trouvent deux servomoteurs qui entraînent un stylo dans un mécanisme de pantographe. Un troisième servomoteur soulève le stylo de haut en bas. Le bac à sable est équipé de deux moteurs vibrants qui aplatissent le sable. La partie électronique de l'horloge des sables se compose d'un Raspberry Pi Pico et d'une carte RTC/driver avec une horloge en temps réel, ainsi que des circuits de commande pour les servomoteurs. Un manuel de construction détaillé peut être téléchargé. Caractéristiques Dimensions: 135 x 110 x 80 mm Temps de construction : environ. 1,5 à 2 heures Inclus 3x Feuilles acryliques prédécoupées avec toutes les pièces mécaniques 3x Mini servomoteurs 2x moteurs de vibration 1x Raspberry Pi Pico 1x Carte RTC/pilote avec les pièces assemblées Ecrous, boulons, entretoises et fils pour l'assemblage Sable blanc à grains fins
€ 49,95€ 39,95Meilleur prix
-

Zhongdi ZD-915 Station de dessoudage
La ZD-915 est une station de dessoudage numérique avec protection ESD qui affiche numériquement la valeur réelle et la valeur de consigne sur un écran LCD. Cette station de dessoudage dispose d'une grande puissance elle se distingue par un boîtier compact et robuste. Elle facilite le dessoudage, car elle peut être utilisée avec une seule main. La ZD-915 dispose d'un pistolet à souder avec un filtre qui attrape tout ce qui est aspiré, il suffit donc de remplacer les filtres pour continuer. Elle est aussi dotée d'un capteur de température dans la pointe permettant d'absorber rapidement les fluctuations de la température. Caractéristiques La température est facilement ajustée par de simples boutons haut/bas. La station de soudage à température contrôlée de 140 W avec une plage réglable de 160°C à 480°C. La station de dessoudage est conçue spécialement pour le dessoudage sans plomb. Le côté de la station dispose d'un support classique avec éponge. Une mise sous/hors tension avec voyant lumineux est également présentée sur la face avant. Spécifications Station Alimentation en tension 220-240 V Consommation électrique 140 W Pression du vide 600 mm HG Pistolet à dessouder Consommation électrique 24 V CA 80 WCapacité de chauffe 130 W Température 160-480 °C Élément chauffant Élément chauffant céramique Inclus 1x ZD-915 Station de dessoudage 2x Pointe à souder de rechange 3x Aiguille de nettoyage pour pointes à dessouder 1x Filtre de rechange pour pistolet à dessouder 1x Manuel
€ 106,12
-

Voltera Imprimante de PCB Voltera V-One
Distribution de pâte à souder et fusion tout-en-un Le Voltera V-One permet de créer des circuits imprimés prototypes à deux couches sur votre bureau. Vous introduisez les fichiers Gerber et vous obtenez PCB. Le distributeur dépose une encre conductrice à base d’argent pour imprimer votre circuit devant vos yeux. L’assemblage de cartes est facile grâce aux fonctions de distribution de pâte à souder et de refusion de la V-One. Il suffit de monter votre carte sur le support d’impression et d’importer votre fichier Gerber dans le logiciel de Voltera. Plus besoin de pochoir Le logiciel de Voltera est conçu pour être utilisé facilement. De l’importation de vos fichiers Gerber au moment où vous appuyez sur le bouton d’impression, le logiciel vous guide en toute sécurité à chaque étape. Compatible avec EAGLE, Altium, KiCad, Mentor Graphics, Cadence, DipTrace, Upverter. Inclus Imprimante PCB V-One Distributeur V-One Sonde V-One Kit de buses Embouts Pack de 3 substrats FR1 4" Pack de 2 substrats FR1 3" Pinces pour substrat Kit de vis moletées Kit Hello World Fil à souder Pince à épiler Alimentation Adaptateur secteur Câbles Guides d'utilisation Téléchargements Specifications Logiciel V-One Manuels d'utilisation Fiches techniques de sécurité Fiches techniques Fichier Voltera CAM pour EAGLE Substrats et modèles Plus d'information FAQ Plus d'informations de la communauté Voltera Caractéristiques techniques Spécifications d'impression Largeur minimale des tracés 0,2 mm Dimension passive minimale 1005 Pas minimum de broche à broche (encre conductrice) 0,8 mml Pas minimum broche à broche (pâte à souder) 0,5 mml Résistivité 12 mΩ/sq @ 70 um hauteur Matériau du substrat FR4 Épaisseur maximale de la carte 3 mm Spécifications de soudure Alliage de pâte à souder Sn42/Bi57.6/Ag0.4 Alliage de fils de soudure SnBiAg1 Température du fer à souder 180-210 °C Lit d'impression Surface d'impression 135 x 113,5 mm Température maximale du lit chauffé 240 °C Taux de rampe du lit chauffé ~2°C/s Empreinte digitale Dimensions 390 x 257 x 207 mm (L x W x H) Poids 7 kg Exigences du système Systèmes d'exploitation compatibles Windows 7 ou plus, MacOS 10.11 ou plusr Format de fichier compatible Gerber Type de connexion USB câblé Certification EN 61326-1:2013 EMC requirements IEC 61010-1 Exigences de sécurité Marquage CE Apposé sur les imprimantes Voltera V-One livrées aux clients européens Conçue et assemblée au Canada. Plus de détails techniques Quickstart Explore Flexible Printed Electronics on the V-One Voltera V-One Capabilities Reel Voltera V-One PCB Printer Walkthrough Unpacking the V-One V-One: Solder Paste Dispensing and Reflow All-in-One Voltera @ Stanford University's Bao Research Group: Robotic Skin and Stretchable Sensors Voltera @ Princeton: The Future of Aerospace Innovation
-

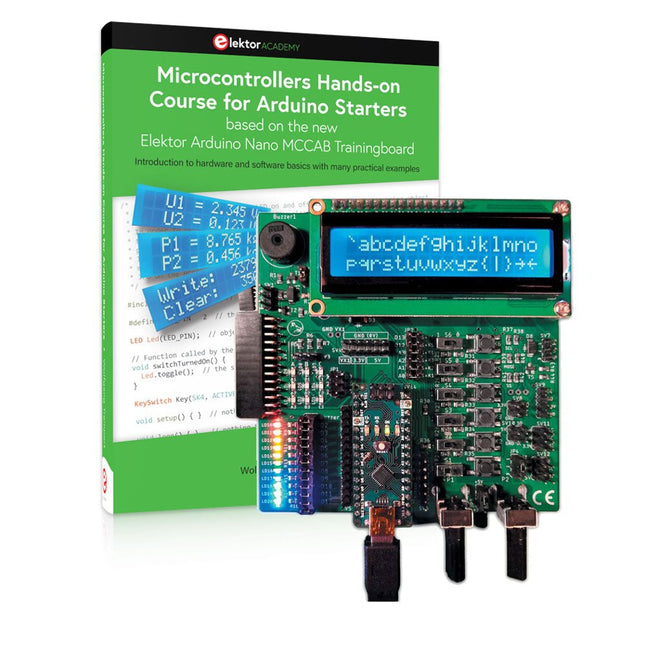
Elektor Bundles Cours pratique sur les microcontrôleurs pour les débutants Arduino (offre groupée)
Réalisez vos propres projets avec la carte d'apprentissage Elektor Arduino Nano MCCAB Le microcontrôleur est probablement le sous-domaine le plus fascinant de l'électronique. Grâce à la multitude de fonctions qu'il combine sur sa puce, il constitue un outil universel permettant aux développeurs de réaliser leurs projets. Pratiquement tous les appareils d'usage quotidien sont aujourd'hui dotés d'un microcontrôleur. Cependant, pour un débutant en électronique, réaliser ses propres idées avec un microcontrôleur est resté jusqu'à présent une chimère en raison de sa complexité. Le concept Arduino a largement simplifié l'utilisation des microcontrôleurs, de sorte que même les débutant peuvent désormais réaliser leurs propres idées électroniques avec un microcontrôleur. Livre et matériel dans un pack : apprendre par la pratique Ce livre, qui est inclus dans le pack, montre comment vous pouvez réaliser vos propres projets avec un microcontrôleur, même sans grande expérience en électronique et en langages de programmation. Il s'agit d'un cours pratique sur les microcontrôleurs pour débutants, car après un aperçu des éléments internes du microcontrôleur et une introduction au langage de programmation C, le cours se concentre sur les exercices pratiques. Le lecteur acquiert les connaissances nécessaires en apprenant par la pratique : dans la vaste section pratique comprenant 12 projets et 46 exercices, ce qui est appris dans la première partie du livre est étayé par de nombreux exemples. Les exercices sont structurés de telle sorte que l'utilisateur se voit confier une tâche à résoudre en utilisant les connaissances acquises dans la partie théorique du livre. Chaque exercice est suivi d'un exemple de solution qui est expliqué et commenté en détail, ce qui aide l'utilisateur à résoudre les problèmes et à les comparer avec sa propre solution. Arduino IDE L'Arduino IDE est un environnement de développement logiciel qui peut être téléchargé gratuitement sur votre PC et qui contient l'ensemble des logiciels nécessaires à la réalisation de vos propres projets de microcontrôleurs. Vous écrivez vos programmes (sketch) avec l'éditeur de l'IDE dans le langage de programmation C. Vous les traduisez en bits et octets que le microcontrôleur comprend à l'aide du compilateur intégré à l'IDE Arduino, puis vous les chargez dans la mémoire du microcontrôleur sur la carte d'apprentissage Elektor Arduino MCCAB Nano à l'aide d'un câble USB. Interroger ou contrôler des capteurs, des moteurs ou des ensembles externes Outre un module microcontrôleur Arduino Nano, la carte d'apprentissage Elektor Arduino Nano MCCAB contient tous les composants nécessaires aux exercices, tels que des diodes électroluminescentes, des interrupteurs, des boutons-poussoirs, des émetteurs de signaux acoustiques, etc. Ce système de formation à microcontrôleur permet également d'interroger ou de commander des capteurs, des moteurs ou des assemblages externes. Spécifications (Carte de formation Arduino Nano MCCAB) Alimentation électrique Via la connexion USB du PC connecté ou un bloc d'alimentation externe (non inclus) Tension de fonctionnement +5 Vcc Tension d'entrée Toutes les entrées 0 V to +5 V VX1 and VX2 +8 V to +12 V (uniquement en cas d'utilisation d'une alimentation externe) Périphérie du matériel LCD 2x16 caractères Potentiomètre P1 & P2 JP3 : sélection de la tension de fonctionnement de P1 et P2 Distributeur SV4 : Distributeur pour les tensions de fonctionnementSV5, SV6 : Distributeur pour les entrées/sorties du microcontrôleur Interrupteurs et boutons Bouton RESET sur le module Arduino Nano 6x interrupteurs à bouton poussoir K1 ... K6 6x interrupteurs à glissière S1 ... S6 JP2 : Connexion des interrupteurs avec les entrées du microcontrôleur Buzzer Buzzer piézo Buzzer1 avec cavalier sur JP6 Voyants lumineux 11 x LED : Indicateur d'état des entrées/sorties LED L sur le module Arduino Nano, connectée au GPIO D13 JP6 : Connexion des LED LD10 ... LD20 avec les GPIO D2 ... D12 Interfaces sérieSPI ET I²C JP4 : Sélection du signal à la broche X du connecteur SPI SV12 SV9 à SV12 : interface SPI (3,3 V/5 V) ou interface I²C Sortie de commutation pour les appareils externes SV1, SV7 : sortie de commutation (maximum +24 V/160 mA, alimentation externe) SV2 : 2x13 connecteurs pour la connexion de modules externes Matrice de 3x3 LED(9 LED rouges) SV3 : Colonnes de la matrice LED 3x3 (sorties D6 ... D8) JP1 : Connexion des lignes avec les GPIOs D3 ... D5 Logiciel Bibliothèque MCCABLib Contrôle des composants matériels (interrupteurs, boutons, DEL, matrice de DEL 3x3, buzzer) sur la carte de formation MCCAB. Température de fonctionnement Jusqu'à +40 °C Dimensions 100 x 100 x 20 mm Spécifications (Arduino Nano) Microcontrôleur ATmega328P Architecture AVR Tension de fonctionnement 5 V Mémoire flash 32 Ko, dont 2 Ko utilisés par le chargeur de démarrage SRAM 2 KB Vitesse d'horloge 16 MHz Connecteurs d'entrée analogique 8 EEPROM 1 KB Courant continu par connecteur d'E/S 40 mA sur un connecteur d'E/S, maximum total de 200 mA sur l'ensemble des connecteurs Tension d'entrée 7-12 V Connecteurs E/S numériques 22 (dont 6 PWM) Sortie PWMt 6 Consommation électrique 19 mA Dimensions 18 x 45 mm Poids 7 g Inclus Elektor Arduino Nano MCCAB Training Board Arduino Nano Livre : Microcontrollers Hands-on Course for Arduino Starters
€ 139,95€ 119,95Meilleur prix
-

Unitree Unitree Go2 Edu Robot quadrupède
Retard temporaire dans la livraison des robots Unitree Comme de nombreux autres fournisseurs, nous rencontrons actuellement des retards dans la livraison des robots Unitree. Un envoi de notre fournisseur est actuellement bloqué en douane, ce qui entraîne un retard dans la livraison des commandes déjà passées. Nous travaillons activement avec notre fournisseur pour résoudre ce problème et espérons obtenir plus de clarté bientôt, mais nous ne pouvons malheureusement pas garantir de délais précis pour le moment. Un nouvel envoi est également en cours d'acheminement, mais il faudra un certain temps avant qu'il n'arrive. Comme d'autres fournisseurs rencontrent les mêmes difficultés, changer de prestataire ne permettrait pas d’obtenir une solution plus rapide. Notre priorité est d’honorer les commandes existantes. Si vous avez des questions ou souhaitez modifier votre commande, n’hésitez pas à contacter notre service client. Nous vous tiendrons informés des prochains développements. La série Unitree Go2 se compose de robots quadrupèdes destinés à la recherche et au développement de systèmes autonomes dans les domaines de l'interaction homme-robot (HRI), du SLAM et du transport. Grâce à ses quatre pattes et à ses 12 degrés de liberté, ce robot peut évoluer sur des terrains variés. Le Go2 est équipé d'un système perfectionné de gestion de l'entraînement et de la puissance, qui permet une vitesse (selon la version) allant jusqu'à 3,7 m/s ou 11,88 km/h, avec une autonomie pouvant atteindre 4 heures. De plus, les moteurs ont un couple de 45 N.m au niveau du corps/des cuisses et des genoux, ce qui permet également des sauts ou des saltos arrière. Caractéristiques Système de reconnaissance ultra-performant : LIDAR 4D L1 Vitesse de course maximale : environ 5 m/s Couple d'articulation maximal : environ 45 N.m Module sans fil : Wi-Fi 6/Bluetooth/4G Autonomie ultra-longue : environ 2 à 4 h (longue durée de vie mesurée en conditions réelles) Système de suivi latéral intelligent : ISS 2.0 Spécifications Module de suivi : Suivi automatique ou télécommandé Caméra frontale : Résolution de transmission d'image : 1280 x 720, champ de vision : 120°, objectif ultra grand angle pour une clarté exceptionnelle. Feu avant : Éclaire intensément la route. LiDAR 4D L1 : Balayage omnidirectionnel ultra grand angle 360° x 90° permettant un évitement automatique avec un angle mort réduit et un fonctionnement stable. 12 moteurs d'articulation : Robuste et puissant, élégant et simple, une expérience visuelle inédite. Microphone interphone : Communication efficace sans restriction de scénario. Sangle auto-rétractable : Facile à transporter et à charger. Plus stable, plus puissant grâce à des appareils avancés. LiDAR 3D, carte ESIM 4G, Wi-Fi 6 bi-bande, Bluetooth 5.2 pour une connexion stable et un contrôle à distance. Puissant cœur de calcul : contrôleur de mouvement, processeur ARM hautes performances, processeur à algorithme d'intelligence artificielle amélioré, ORIN NX/NANO externe. Batterie intelligente : batterie standard de 8000 mAh, batterie longue durée de 15000 mAh, protection contre les surchauffes, les surcharges et les courts-circuits. Haut-parleur pour écouter de la musique : écoutez votre musique comme bon vous semble. Variantes de l'Unitree Go2 Le Go2 impressionne non seulement par ses capacités techniques, mais aussi par son design moderne et fin qui lui confère un look futuriste et attire tous les regards. Le Go2 Air est spécialement conçu pour les démonstrations et les présentations. Grâce à ses fonctionnalités de base, il offre une base solide pour démontrer les capacités de mouvement et les fonctionnalités d'un robot à quatre pattes. Important : Le Go2 Air est livré sans contrôleur. Celui-ci est disponible en option. Équipés d'un puissant processeur 8 cœurs hautes performances, les modèles Pro et Edu offrent une puissance de calcul impressionnante, indispensable aux tâches complexes et aux calculs exigeants. Cela permet un traitement des données plus rapide et plus efficace, faisant des modèles Pro et Edu des partenaires fiables pour vos projets. À partir de la version Edu, le Go2 est programmable et offre des possibilités infinies pour le développement et la recherche de vos propres applications robotiques. Le Go2 est également capable de gérer une hauteur de marche allant jusqu'à 14 cm. Cela en fait un outil idéal pour la recherche, l'éducation et l'initiation au monde de la robotique. Le Go2 Edu est livré avec une télécommande pour un contrôle simple et intuitif. Il dispose également d'une station d'accueil d'une puissance de calcul impressionnante de 100 TOPS, équipée de puissants algorithmes d'IA et d'une assistance technique. Le Go2 Edu est équipé d'une puissante batterie de 15000 mAh qui lui confère une autonomie impressionnante allant jusqu'à 4 heures. Cette longue durée de fonctionnement permet au robot d'effectuer des missions d'exploration plus longues et d'accomplir des tâches exigeantes. Comparaison des modèles Air Pro Edu/Edu Plus Dimensions (debout) 70 x 31 x 40 cm 70 x 31 x 40 cm 70 x 31 x 40 cm Dimensions (accroupi) 76 x 31 x 20 cm 76 x 31 x 20 cm 76 x 31 x 20 cm Matériau Alliage d'aluminium + Plastique technique haute résistance Alliage d'aluminium + Plastique technique haute résistance Alliage d'aluminium + Plastique technique haute résistance plastique Poids (avec batterie) environ 15 kg environ 15 kg environ 15 kg Tension 28~33,6 V 28~33,6 V 28~33,6 V Puissance de pointe environ 3000 W environ 3000 W Charge utile ≈7 kg (MAX ~ 10 kg) ≈8 kg (MAX ~ 10 kg) ≈8 kg (MAX ~ 12 kg) Vitesse 0~2,5 m/s 0~3,5 m/s 0~3,7 m/s (MAX ~ 5 m/s) Hauteur de montée/chute max. environ 15 cm environ 16 cm environ 16 cm Angle de montée max. 30° 40° 40° Puissance de calcul de base N/A 8 cœurs hautes performances Processeur Processeur 8 cœurs hautes performances Moteur d'articulation du genou en aluminium Ensemble de 12 Ensemble de 12 Ensemble de 12 Circuit intra-articulaire (genou) ✓ ✓ ✓ Refroidisseur de caloduc articulaire ✓ ✓ ✓ Amplitude de mouvement Corps : −48~48° Corps : −48~48° Corps : −48~48° Cuisse : −200°~90° Cuisse : −200°~90° Cuisse : −200°~90° Jarret : −156°~−48° Jarret : −156°~−48° Couple max. N/A Environ 45 N.m Environ 45 N.m LiDAR 3D super grand-angle ✓ ✓ ✓ Module de suivi de positionnement vectoriel sans fil N/A ✓ ✓ Grand angle HD Caméra ✓ ✓ ✓ Capteur de force côté pied N/A N/A ✓ Action de base ✓ ✓ ✓ Sangle de mise à l'échelle automatique N/A ✓ N/A OTA intelligent amélioré ✓ ✓ ✓ Transmission d'images RTT 2.0 ✓ ✓ ✓ Télécommande de base via l'application ✓ ✓ ✓ Visualisation des données via l'application ✓ ✓ ✓ Programme graphique via l'application ✓ ✓ ✓ Lampe frontale (3) W) ✓ ✓ ✓ Wi-Fi 6 double bande ✓ ✓ ✓ Bluetooth 5.2/4.2/2.1 ✓ ✓ ✓ Module 4G N/A CN/GB CN/GB Voix Fonction N/A ✓ ✓ Lecture musicale N/A ✓ ✓ Système intelligent de suivi latéral ISS 2.0 N/A ✓ ✓ Détection et évitement intelligents ✓ ✓ ✓ Secondaire Développement N/A N/A ✓ Contrôleur manuel En option En option ✓ Module haute puissance de calcul N/A N/A Edu : 40 TOPS de puissance de calcul Edu Plus : 100 TOPS de puissance de calcul NVIDIA Jetson Orin (en option) Smart Batterie Standard (8000 mAh) Standard (8000 mAh) Longue autonomie (15000 mAh) Autonomie 1 à 2 h 1 à 2 h 2 à 4 h Chargeur Standard (33,6 V, 3,5 A) Standard (33,6 V, 3,5 A) Charge rapide (33,6 V, 9 A) Inclus 1x Unitree Go2 Edu 1x Unitree Go2 télécommande 1x Unitree Go2 batterie (15000 mAh) 1x Unitree station d'accueil avec une puissance de calcul de 40 TOPS Téléchargements Documentation iOS/Android apps GitHub
€ 12.499,00
Meilleur prix
-

Unitree Unitree Go2 Pro Robot quadrupède
Retard temporaire dans la livraison des robots Unitree Comme de nombreux autres fournisseurs, nous rencontrons actuellement des retards dans la livraison des robots Unitree. Un envoi de notre fournisseur est actuellement bloqué en douane, ce qui entraîne un retard dans la livraison des commandes déjà passées. Nous travaillons activement avec notre fournisseur pour résoudre ce problème et espérons obtenir plus de clarté bientôt, mais nous ne pouvons malheureusement pas garantir de délais précis pour le moment. Un nouvel envoi est également en cours d'acheminement, mais il faudra un certain temps avant qu'il n'arrive. Comme d'autres fournisseurs rencontrent les mêmes difficultés, changer de prestataire ne permettrait pas d’obtenir une solution plus rapide. Notre priorité est d’honorer les commandes existantes. Si vous avez des questions ou souhaitez modifier votre commande, n’hésitez pas à contacter notre service client. Nous vous tiendrons informés des prochains développements. La série Unitree Go2 se compose de robots quadrupèdes destinés à la recherche et au développement de systèmes autonomes dans les domaines de l'interaction homme-robot (HRI), du SLAM et du transport. Grâce à ses quatre pattes et à ses 12 degrés de liberté, ce robot peut évoluer sur des terrains variés. Le Go2 est équipé d'un système perfectionné de gestion de l'entraînement et de la puissance, qui permet une vitesse (selon la version) allant jusqu'à 3,7 m/s ou 11,88 km/h, avec une autonomie pouvant atteindre 4 heures. De plus, les moteurs ont un couple de 45 N.m au niveau du corps/des cuisses et des genoux, ce qui permet également des sauts ou des saltos arrière. Caractéristiques Système de reconnaissance ultra-performant : LIDAR 4D L1 Vitesse de course maximale : environ 5 m/s Couple d'articulation maximal : environ 45 N.m Module sans fil : Wi-Fi 6/Bluetooth/4G Autonomie ultra-longue : environ 2 à 4 h (longue durée de vie mesurée en conditions réelles) Système de suivi latéral intelligent : ISS 2.0 Spécifications Module de suivi : Suivi automatique ou télécommandé Caméra frontale : Résolution de transmission d'image : 1280 x 720, champ de vision : 120°, objectif ultra grand angle pour une clarté exceptionnelle. Feu avant : Éclaire intensément la route. LiDAR 4D L1 : Balayage omnidirectionnel ultra grand angle 360° x 90° permettant un évitement automatique avec un angle mort réduit et un fonctionnement stable. 12 moteurs d'articulation : Robuste et puissant, élégant et simple, une expérience visuelle inédite. Microphone interphone : Communication efficace sans restriction de scénario. Sangle auto-rétractable : Facile à transporter et à charger. Plus stable, plus puissant grâce à des appareils avancés. LiDAR 3D, carte ESIM 4G, Wi-Fi 6 bi-bande, Bluetooth 5.2 pour une connexion stable et un contrôle à distance. Puissant cœur de calcul : contrôleur de mouvement, processeur ARM hautes performances, processeur à algorithme d'intelligence artificielle amélioré, ORIN NX/NANO externe. Batterie intelligente : batterie standard de 8000 mAh, batterie longue durée de 15000 mAh, protection contre les surchauffes, les surcharges et les courts-circuits. Haut-parleur pour écouter de la musique : écoutez votre musique comme bon vous semble. Variantes de l'Unitree Go2 Le Go2 impressionne non seulement par ses capacités techniques, mais aussi par son design moderne et fin qui lui confère un look futuriste et attire tous les regards. Le Go2 Air est spécialement conçu pour les démonstrations et les présentations. Grâce à ses fonctionnalités de base, il offre une base solide pour démontrer les capacités de mouvement et les fonctionnalités d'un robot à quatre pattes. Important : Le Go2 Air est livré sans contrôleur. Celui-ci est disponible en option. Équipés d'un puissant processeur 8 cœurs hautes performances, les modèles Pro et Edu offrent une puissance de calcul impressionnante, indispensable aux tâches complexes et aux calculs exigeants. Cela permet un traitement des données plus rapide et plus efficace, faisant des modèles Pro et Edu des partenaires fiables pour vos projets. À partir de la version Edu, le Go2 est programmable et offre des possibilités infinies pour le développement et la recherche de vos propres applications robotiques. Le Go2 est également capable de gérer une hauteur de marche allant jusqu'à 14 cm. Cela en fait un outil idéal pour la recherche, l'éducation et l'initiation au monde de la robotique. Le Go2 Edu est livré avec une télécommande pour un contrôle simple et intuitif. Il dispose également d'une station d'accueil d'une puissance de calcul impressionnante de 100 TOPS, équipée de puissants algorithmes d'IA et d'une assistance technique. Le Go2 Edu est équipé d'une puissante batterie de 15000 mAh qui lui confère une autonomie impressionnante allant jusqu'à 4 heures. Cette longue durée de fonctionnement permet au robot d'effectuer des missions d'exploration plus longues et d'accomplir des tâches exigeantes. Comparaison des modèles Air Pro Edu/Edu Plus Dimensions (debout) 70 x 31 x 40 cm 70 x 31 x 40 cm 70 x 31 x 40 cm Dimensions (accroupi) 76 x 31 x 20 cm 76 x 31 x 20 cm 76 x 31 x 20 cm Matériau Alliage d'aluminium + Plastique technique haute résistance Alliage d'aluminium + Plastique technique haute résistance Alliage d'aluminium + Plastique technique haute résistance plastique Poids (avec batterie) environ 15 kg environ 15 kg environ 15 kg Tension 28~33,6 V 28~33,6 V 28~33,6 V Puissance de pointe environ 3000 W environ 3000 W Charge utile ≈7 kg (MAX ~ 10 kg) ≈8 kg (MAX ~ 10 kg) ≈8 kg (MAX ~ 12 kg) Vitesse 0~2,5 m/s 0~3,5 m/s 0~3,7 m/s (MAX ~ 5 m/s) Hauteur de montée/chute max. environ 15 cm environ 16 cm environ 16 cm Angle de montée max. 30° 40° 40° Puissance de calcul de base N/A 8 cœurs hautes performances Processeur Processeur 8 cœurs hautes performances Moteur d'articulation du genou en aluminium Ensemble de 12 Ensemble de 12 Ensemble de 12 Circuit intra-articulaire (genou) ✓ ✓ ✓ Refroidisseur de caloduc articulaire ✓ ✓ ✓ Amplitude de mouvement Corps : −48~48° Corps : −48~48° Corps : −48~48° Cuisse : −200°~90° Cuisse : −200°~90° Cuisse : −200°~90° Jarret : −156°~−48° Jarret : −156°~−48° Couple max. N/A Environ 45 N.m Environ 45 N.m LiDAR 3D super grand-angle ✓ ✓ ✓ Module de suivi de positionnement vectoriel sans fil N/A ✓ ✓ Grand angle HD Caméra ✓ ✓ ✓ Capteur de force côté pied N/A N/A ✓ Action de base ✓ ✓ ✓ Sangle de mise à l'échelle automatique N/A ✓ N/A OTA intelligent amélioré ✓ ✓ ✓ Transmission d'images RTT 2.0 ✓ ✓ ✓ Télécommande de base via l'application ✓ ✓ ✓ Visualisation des données via l'application ✓ ✓ ✓ Programme graphique via l'application ✓ ✓ ✓ Lampe frontale (3) W) ✓ ✓ ✓ Wi-Fi 6 double bande ✓ ✓ ✓ Bluetooth 5.2/4.2/2.1 ✓ ✓ ✓ Module 4G N/A CN/GB CN/GB Voix Fonction N/A ✓ ✓ Lecture musicale N/A ✓ ✓ Système intelligent de suivi latéral ISS 2.0 N/A ✓ ✓ Détection et évitement intelligents ✓ ✓ ✓ Secondaire Développement N/A N/A ✓ Contrôleur manuel En option En option ✓ Module haute puissance de calcul N/A N/A Edu : 40 TOPS de puissance de calcul Edu Plus : 100 TOPS de puissance de calcul NVIDIA Jetson Orin (en option) Smart Batterie Standard (8000 mAh) Standard (8000 mAh) Longue autonomie (15000 mAh) Autonomie 1 à 2 h 1 à 2 h 2 à 4 h Chargeur Standard (33,6 V, 3,5 A) Standard (33,6 V, 3,5 A) Charge rapide (33,6 V, 9 A) Inclus 1x Unitree Go2 Pro 1x Unitree Go2 batterie (8000 mAh) Téléchargements Documentation iOS/Android apps GitHub
€ 3.599,00
Meilleur prix
-

Unitree Unitree Go2 Air Robot quadrupède
Retard temporaire dans la livraison des robots Unitree Comme de nombreux autres fournisseurs, nous rencontrons actuellement des retards dans la livraison des robots Unitree. Un envoi de notre fournisseur est actuellement bloqué en douane, ce qui entraîne un retard dans la livraison des commandes déjà passées. Nous travaillons activement avec notre fournisseur pour résoudre ce problème et espérons obtenir plus de clarté bientôt, mais nous ne pouvons malheureusement pas garantir de délais précis pour le moment. Un nouvel envoi est également en cours d'acheminement, mais il faudra un certain temps avant qu'il n'arrive. Comme d'autres fournisseurs rencontrent les mêmes difficultés, changer de prestataire ne permettrait pas d’obtenir une solution plus rapide. Notre priorité est d’honorer les commandes existantes. Si vous avez des questions ou souhaitez modifier votre commande, n’hésitez pas à contacter notre service client. Nous vous tiendrons informés des prochains développements. La série Unitree Go2 se compose de robots quadrupèdes destinés à la recherche et au développement de systèmes autonomes dans les domaines de l'interaction homme-robot (HRI), du SLAM et du transport. Grâce à ses quatre pattes et à ses 12 degrés de liberté, ce robot peut évoluer sur des terrains variés. Le Go2 est équipé d'un système perfectionné de gestion de l'entraînement et de la puissance, qui permet une vitesse (selon la version) allant jusqu'à 3,7 m/s ou 11,88 km/h, avec une autonomie pouvant atteindre 4 heures. De plus, les moteurs ont un couple de 45 N.m au niveau du corps/des cuisses et des genoux, ce qui permet également des sauts ou des saltos arrière. Caractéristiques Système de reconnaissance ultra-performant : LIDAR 4D L1 Vitesse de course maximale : environ 5 m/s Couple d'articulation maximal : environ 45 N.m Module sans fil : Wi-Fi 6/Bluetooth/4G Autonomie ultra-longue : environ 2 à 4 h (longue durée de vie mesurée en conditions réelles) Système de suivi latéral intelligent : ISS 2.0 Spécifications Module de suivi : Suivi automatique ou télécommandé Caméra frontale : Résolution de transmission d'image : 1280 x 720, champ de vision : 120°, objectif ultra grand angle pour une clarté exceptionnelle. Feu avant : Éclaire intensément la route. LiDAR 4D L1 : Balayage omnidirectionnel ultra grand angle 360° x 90° permettant un évitement automatique avec un angle mort réduit et un fonctionnement stable. 12 moteurs d'articulation : Robuste et puissant, élégant et simple, une expérience visuelle inédite. Microphone interphone : Communication efficace sans restriction de scénario. Sangle auto-rétractable : Facile à transporter et à charger. Plus stable, plus puissant grâce à des appareils avancés. LiDAR 3D, carte ESIM 4G, Wi-Fi 6 bi-bande, Bluetooth 5.2 pour une connexion stable et un contrôle à distance. Puissant cœur de calcul : contrôleur de mouvement, processeur ARM hautes performances, processeur à algorithme d'intelligence artificielle amélioré, ORIN NX/NANO externe. Batterie intelligente : batterie standard de 8000 mAh, batterie longue durée de 15000 mAh, protection contre les surchauffes, les surcharges et les courts-circuits. Haut-parleur pour écouter de la musique : écoutez votre musique comme bon vous semble. Variantes de l'Unitree Go2 Le Go2 impressionne non seulement par ses capacités techniques, mais aussi par son design moderne et fin qui lui confère un look futuriste et attire tous les regards. Le Go2 Air est spécialement conçu pour les démonstrations et les présentations. Grâce à ses fonctionnalités de base, il offre une base solide pour démontrer les capacités de mouvement et les fonctionnalités d'un robot à quatre pattes. Important : Le Go2 Air est livré sans contrôleur. Celui-ci est disponible en option. Équipés d'un puissant processeur 8 cœurs hautes performances, les modèles Pro et Edu offrent une puissance de calcul impressionnante, indispensable aux tâches complexes et aux calculs exigeants. Cela permet un traitement des données plus rapide et plus efficace, faisant des modèles Pro et Edu des partenaires fiables pour vos projets. À partir de la version Edu, le Go2 est programmable et offre des possibilités infinies pour le développement et la recherche de vos propres applications robotiques. Le Go2 est également capable de gérer une hauteur de marche allant jusqu'à 14 cm. Cela en fait un outil idéal pour la recherche, l'éducation et l'initiation au monde de la robotique. Le Go2 Edu est livré avec une télécommande pour un contrôle simple et intuitif. Il dispose également d'une station d'accueil d'une puissance de calcul impressionnante de 100 TOPS, équipée de puissants algorithmes d'IA et d'une assistance technique. Le Go2 Edu est équipé d'une puissante batterie de 15000 mAh qui lui confère une autonomie impressionnante allant jusqu'à 4 heures. Cette longue durée de fonctionnement permet au robot d'effectuer des missions d'exploration plus longues et d'accomplir des tâches exigeantes. Comparaison des modèles Air Pro Edu/Edu Plus Dimensions (debout) 70 x 31 x 40 cm 70 x 31 x 40 cm 70 x 31 x 40 cm Dimensions (accroupi) 76 x 31 x 20 cm 76 x 31 x 20 cm 76 x 31 x 20 cm Matériau Alliage d'aluminium + Plastique technique haute résistance Alliage d'aluminium + Plastique technique haute résistance Alliage d'aluminium + Plastique technique haute résistance plastique Poids (avec batterie) environ 15 kg environ 15 kg environ 15 kg Tension 28~33,6 V 28~33,6 V 28~33,6 V Puissance de pointe environ 3000 W environ 3000 W Charge utile ≈7 kg (MAX ~ 10 kg) ≈8 kg (MAX ~ 10 kg) ≈8 kg (MAX ~ 12 kg) Vitesse 0~2,5 m/s 0~3,5 m/s 0~3,7 m/s (MAX ~ 5 m/s) Hauteur de montée/chute max. environ 15 cm environ 16 cm environ 16 cm Angle de montée max. 30° 40° 40° Puissance de calcul de base N/A 8 cœurs hautes performances Processeur Processeur 8 cœurs hautes performances Moteur d'articulation du genou en aluminium Ensemble de 12 Ensemble de 12 Ensemble de 12 Circuit intra-articulaire (genou) ✓ ✓ ✓ Refroidisseur de caloduc articulaire ✓ ✓ ✓ Amplitude de mouvement Corps : −48~48° Corps : −48~48° Corps : −48~48° Cuisse : −200°~90° Cuisse : −200°~90° Cuisse : −200°~90° Jarret : −156°~−48° Jarret : −156°~−48° Couple max. N/A Environ 45 N.m Environ 45 N.m LiDAR 3D super grand-angle ✓ ✓ ✓ Module de suivi de positionnement vectoriel sans fil N/A ✓ ✓ Grand angle HD Caméra ✓ ✓ ✓ Capteur de force côté pied N/A N/A ✓ Action de base ✓ ✓ ✓ Sangle de mise à l'échelle automatique N/A ✓ N/A OTA intelligent amélioré ✓ ✓ ✓ Transmission d'images RTT 2.0 ✓ ✓ ✓ Télécommande de base via l'application ✓ ✓ ✓ Visualisation des données via l'application ✓ ✓ ✓ Programme graphique via l'application ✓ ✓ ✓ Lampe frontale (3) W) ✓ ✓ ✓ Wi-Fi 6 double bande ✓ ✓ ✓ Bluetooth 5.2/4.2/2.1 ✓ ✓ ✓ Module 4G N/A CN/GB CN/GB Voix Fonction N/A ✓ ✓ Lecture musicale N/A ✓ ✓ Système intelligent de suivi latéral ISS 2.0 N/A ✓ ✓ Détection et évitement intelligents ✓ ✓ ✓ Secondaire Développement N/A N/A ✓ Contrôleur manuel En option En option ✓ Module haute puissance de calcul N/A N/A Edu : 40 TOPS de puissance de calcul Edu Plus : 100 TOPS de puissance de calcul NVIDIA Jetson Orin (en option) Smart Batterie Standard (8000 mAh) Standard (8000 mAh) Longue autonomie (15000 mAh) Autonomie 1 à 2 h 1 à 2 h 2 à 4 h Chargeur Standard (33,6 V, 3,5 A) Standard (33,6 V, 3,5 A) Charge rapide (33,6 V, 9 A) Inclus 1x Unitree Go2 Air 1x Unitree Go2 batterie (8000 mAh) Téléchargements Documentation iOS/Android apps GitHub
€ 2.650,00
Meilleur prix
-

UFactory UFactory uArm Swift Pro
Le uArm Swift Pro est un bras robotique de haute qualité qui peut être utilisé dans un large éventail d'applications. Le uArm Swift Pro a été développé et optimisé pour une utilisation dans l'enseignement, ce qui signifie que de nombreux packages sont déjà disponibles pour les plateformes open source telles que ROS. Le uArm Swift Pro a une répétabilité de position de 0,2 mm et est également équipé d'un moteur pas à pas et d'un encodeur 12 bits. Ce ne sont là que quelques-unes des raisons qui font du uArm Swift Pro un excellent choix pour une utilisation pédagogique. Le kit d'impression 3D, qui permet de convertir le uArm Swift Pro en imprimante 3D en moins d'une minute, est une autre caractéristique intéressante. L'uArm peut être utilisé avec les plateformes/systèmes de développement suivants : SDK UFACTORY Arduino Python ROS GRABCAD OpenMV Application pour smartphone L'application pour smartphone iOS est déjà disponible dans l’App Store et permet de contrôler et de surveiller facilement le bras robotique. L'application pour Android est en cours de développement et sera bientôt disponible. Un exemple de vision industrielle Le GIF suivant montre l'uArm en combinaison avec l'OpenMV Machine Vision Cam M7 et les applications de reconnaissance faciale qui peuvent être mises en œuvre en MicroPython. Spécifications Degrés de liberté : 4 Répétabilité : Jusqu'à 0,2 mm Charge utile : 500 g Plage de travail : 50-320 mm Vitesse de positionnement : 100 m/s Retour de position : codeur 12 bits Dimensions : 150 x 140 x 281 mm 150 x 140 x 281 mm Poids : 2,2 kg Inclus UFactory uArm Swift Pro Body Bluetooth & Pince à vide Téléchargements Fiche technique
€ 939,00
Meilleur prix
-

Robotis Robotis TurtleBot3 Waffle Pi (Raspberry Pi 4 inclus)
La plateforme ROS la plus populaire au monde TurtleBot est le robot open source le plus populaire pour l'éducation et la recherche. La nouvelle génération de TurtleBot3 est un petit robot mobile, peu coûteux, entièrement programmable et basé sur ROS. Il est destiné à être utilisé pour l'éducation, la recherche, les loisirs et le prototypage de produits. Coût abordable TurtleBot a été développé pour répondre aux besoins économiques des écoles, des laboratoires et des entreprises. TurtleBot3 est le robot le plus abordable parmi les robots mobiles SLAM équipés d'un capteur de distance laser 360° LDS-01. Norme ROS La marque TurtleBot est gérée par Open Robotics, qui développe et maintient ROS. Aujourd'hui, ROS est devenu la plateforme de référence pour tous les roboticiens du monde. TurtleBot peut être intégré à des composants robotiques existants basés sur ROS, mais TurtleBot3 peut être une plateforme abordable pour ceux qui veulent commencer à apprendre ROS. Extensibilité TurtleBot3 encourage les utilisateurs à personnaliser sa structure mécanique à l'aide d'options alternatives : carte embarquée open source (en tant que carte de contrôle), ordinateur et capteurs. TurtleBot3 Waffle Pi est une plate-forme à deux roues à entraînement différentiel, mais sa structure et sa mécanique peuvent être personnalisées de nombreuses façons : voitures, vélos, remorques, etc. Développez vos idées au-delà de l'imagination avec différents SBC, capteurs et moteurs sur une structure évolutive. Actionneur modulaire pour robot mobile TurtleBot3 est capable d'obtenir des données spatiales précises en utilisant 2 DYNAMIXEL dans les articulations des roues. Les DYNAMIXEL de la série XM peuvent être utilisés selon l'un des 6 modes de fonctionnement (série XL : 4 modes de fonctionnement) : Mode de contrôle de la vitesse pour les roues, mode de contrôle du couple ou mode de contrôle de la position pour les articulations, etc. DYNAMIXEL peut même être utilisé pour fabriquer un manipulateur mobile qui est léger mais qui peut être contrôlé avec précision grâce au contrôle de la vitesse, du couple et de la position. DYNAMIXEL est un composant c?ur qui rend TurtleBot3 parfait. Il est facile à assembler, à entretenir, à remplacer et à reconfigurer. Carte de contrôle ouverte pour ROS La carte de contrôle est open-source au niveau du matériel et du logiciel pour la communication ROS. La carte de contrôle OpenCR1.0 est suffisamment puissante pour contrôler non seulement les capteurs DYNAMIXEL mais aussi les capteurs ROBOTIS qui sont fréquemment utilisés pour des tâches de reconnaissance de base de manière rentable. Différents capteurs tels que les capteurs tactiles, les capteurs infrarouges, les capteurs de couleur et bien d'autres sont disponibles. L'OpenCR1.0 possède un capteur IMU à l'intérieur de la carte afin d'améliorer la précision du contrôle pour d'innombrables applications. La carte dispose d'alimentations de 3,3 V, 5 V et 12 V pour renforcer les gammes d'appareils informatiques disponibles. Source ouverte Le matériel, le micrologiciel et le logiciel de TurtleBot3 sont des logiciels libres, ce qui signifie que les utilisateurs sont invités à télécharger, modifier et partager les codes sources. Tous les composants de TurtleBot3 sont fabriqués en plastique moulé par injection afin de réduire les coûts, mais les données de CAO 3D sont également disponibles pour l'impression 3D. Spécifications Vitesse de translation maximale 0.26 m/s Vitesse de rotation maximale 1.82 rad/s (104.27 deg/s) Charge utile maximale 30 kg Taille (L x L x H) 281 x 306 x 141 mm Poids (+ SBC + batterie + capteurs) 1.8 kg Seuil de montée Max 10 mm Durée d'utilisation prévue 2 h Temps de charge prévu 2 h 30 m SBC (ordinateur à carte unique) Raspberry Pi 4 (2 Go RAM) MCU 32-bit ARM Cortex-M7 with FPU (216 MHz, 462 DMIPS) Contrôleur à distance RC-100B + BT-410 Set (Bluetooth 4, BLE) Actionneur XL430-W210 LDS (capteur de distance laser) 360 Laser Distance Sensor LDS-01 or LDS-02 Caméra Raspberry Pi Camera Module v2.1 IMU Gyroscope 3 axesAccelerometer 3 axes Connecteurs d'alimentation 3.3 V/800 mA5 V/4 A12 V/1 A Connecteurs d'extension GPIO 18 brochesArduino 32 broches Périphériques 3x UART, 1x bus CAN, 1x SPI, 1x I²C, 5x CAN, 4x 5-pin OLLO Ports DYNAMIXEL 3x RS485, 3x TTL Audio Plusieurs séquences programmables LED programmables 4x User LED LED d'état 1x Board status LED1x Arduino LED1x Power LED Boutons et interrupteurs 2x boutton poussoir, 1x bouton Reset, 2x DIPswitch Batterie Lithium polymer 11.1 V 1800 mAh / 19.98 Wh 5C Connexion PC USB Mise à jour du micrologiciel par USB / par JTAG Adaptateur d'alimentation (SMPS) Entrée: 100-240 VCA 50/60 Hz, 1.5 A @maxSortie: 12 VCC, 5 A Téléchargements Programmation de robots ROS GitHub Manuel électronique Communauté
€ 1.879,00
Meilleur prix
-

Clearpath Robotics Clearpath Robotics TurtleBot 4 Lite
TurtleBot 4 est la nouvelle génération de la plateforme robotique open source la plus populaire au monde pour l'éducation et la recherche, offrant une meilleure puissance de calcul, de meilleurs capteurs et une expérience utilisateur de classe mondiale à un prix abordable. TurtleBot 4 Lite est équipée d'une base mobile iRobot Create3, d'un puissant Raspberry Pi 4 exécutant ROS 2, d'une caméra stéréo spatiale OAK-D AI, d'un LiDAR 2D et de bien d'autres choses encore. Tous les composants ont été intégrés de manière transparente pour offrir une plateforme de développement et d'apprentissage prête à l'emploi. Profitez de la communauté florissante de développeurs ROS open source et commencez à apprendre la robotique dès le premier jour. Spécifications Plate-forme de base iRobot Create 3 Roues (diamètre) 72 mm Garde au sol 4,5 mm Ordinateur de bord Raspberry Pi 4 (4 Go) Vitesse linéaire maximale 0,31 m/s en mode sécurisé0,46 m/s sans mode sécurisé Vitesse angulaire maximale 1,90 rad/s Charge utile maximale 9 kg Temps de fonctionnement 2h 30m - 4h selon la charge Temps de charge 2h 30m Lidar RPLIDAR A1M8 Caméra OAK-D-Lite Alimentation utilisateur VBAT @1.9 A5 V @ faible courant3,3 V @ faible courant Extension USB 2x USB 2.0 (Type A)2x USB 3.0 (Type A) LED programmables Créer 3 anneaux lumineux Boutons et interrupteurs 2x boutons d'utilisateur Create 31x bouton d'alimentation Create3 Batterie 26 Wh Lithium Ion (14,4 V nominal) Station d'accueil Inclus Taille (L x L x H) 342 x 339 x 192 mm Poids 3,3 kg Téléchargements • Manuel de l’utilisateur
€ 1.699,00
Meilleur prix
-

puhui T-962 v2.0 Four à refusion (version améliorée d'Elektor)
Cette version améliorée 2.0 (disponible exclusivement chez Elektor) contient les changements suivantes : Enhanced protective earthing (PE) for furnace chassis Extra thermal insulation layer around furnace to reduce odors Connexion à un ordinateur permettant l'édition des courbes sur un PC Fonctionnalités telles que le contrôle constant de la température et les fonctions de temporisation Four à refusion à infrarouge T-962 v2.0 est un four de soudure par fusion pour CI contrôlé par microprocesseur. Il peut être utilisé pour souder efficacement divers composants CMS et BGA. L’ensemble du processus de soudure est automatique et très facile à utiliser. Cette machine utilise un rayonnement infrarouge puissant et la circulation du flux d’air chaud, ce qui permet de maintenir une température très précise et uniformément répartie. Un plaque à fentes est conçu pour contenir la pièce à traiter, et permet d’utiliser des techniques de soudure sûres et de manipuler des CMS, BGA et d’autres petites pièces électroniques montées circuits imprimes. Le T-962 v2.0 peut être utilisé pour la dessoudure afin de rectifier automatiquement les joints de soudure défectueux, pour retirer/remplacer les composants endommagés et pour achever de petits modèles ou prototypes électroniques. Caractéristiques Large zone de soudure infrarouge Surface effective de soudure : 180 x 235 mm ; cela augmente considérablement la plage d’utilisation de ce dispositif et le rend un investissement économique. Choix de différents cycles de soudure Les paramètres de huit cycles de soudure sont prédéfinis et l’ensemble du processus peut être achevé automatiquement en commençant par le préchauffage, le trempage et la refusion jusqu’au refroidissement. Chauffage spécifique et égalisation de la température pour tous les modèles. Utilise jusqu’à 800 W de chauffage infrarouge économe en énergie et une circulation d’air pour refaire couler la soudure. Design ergonomique, pratique et facile à utiliser Une construction de qualité, mais aussi un poids léger et un faible encombrement permettent au T-962 v2.0 d’être facilement positionné sur un établi, transporté ou stocké. Nombreuses fonctions disponibles Le T-962 v2.0 peut souder la plupart des petits composants des circuits imprimés, par exemple CHIP, SOP, PLCC, QFP, BGA, etc. Il s’agit de la solution de réparation idéale, allant des simples fabrications à la production de petits lots. Caractéristiques techniques Zone de soudure (max.) 180 x 235 mm Puissance (max.) 800 W Plage de température 0-280°C Mode de chauffage Infrarouge Temps de traitement 1 à 8 minutes Alimentation 220 V AC/50 Hz Écran LCD avec rétroéclairage Mode de contrôle 8 courbes de température intelligentes Dimensions 310 x 290 x 170 mm Poids 6,2 kg Inclus 1x T-962 v2.0 Four à refusion (version Elektor) 2x Fusibles 1x Cordon d'alimentation (UE) Téléchargements Manual
€ 299,00€ 269,00Meilleur prix
-

Elektor Digital Red Pitaya for Test and Measurement (E-book)
The Red Pitaya (STEMlab) is a credit card-sized, open-source test and measurement board that can be used to replace most measurement instruments used in electronics laboratories. With a single click, the board can transform into a web-based oscilloscope, spectrum analyser, signal generator, LCR meter, Bode plotter, and microcontroller. The Red Pitaya (STEMlab) can replace the many pieces of expensive measurement equipment found at professional research organisations and teaching laboratories. The device, that based on Linux, includes an FPGA, digital signal processing (DSP), dual core ARM Cortex processor, signal acquisition and generation circuitry, micro USB socket, microSD card slot, RJ45 socket for Ethernet connection, and USB socket – all powered from an external mains adaptor. This book is an introduction to electronics. It aims to teach the principles and applications of basic electronics by carrying out real experiments using the Red Pitaya (STEMlab). The book includes many chapters on basic electronics and teaches the theory and use of electronic components including resistors, capacitors, inductors, diodes, transistors, and operational amplifiers in electronic circuits. Many fun and interesting Red Pitaya (STEMlab) experiments are included in the book. The book also makes an introduction to visual programming environment. The book is written for college level and first year university students studying electrical or electronic engineering.
€ 29,95
Membres : € 26,96
-

Elektor Digital Advanced Control Robotics (E-book)
If you enjoy DIY electronics, projects, software and robots, you’ll find this book intellectually stimulating and immediately useful. With the right parts and a little guidance, you can build robot systems that suit your needs more than overpriced commercial systems can. 20 years ago, robots based on simple 8-bit processors and touch sensors were the norm. Now, it’s possible to build multi-core robots that can react to their surroundings with intelligence. Today’s robots combine sensor readings from accelerometers, gyroscopes and computer vision sensors to learn about their environments. They can respond using sophisticated control algorithms and they can process data both locally and in the cloud. This book, which covers the theory and best practices associated with advanced robot technologies, was written to help roboticists, whether amateur hobbyist or professional, take their designs to the next level. As will be seen, building advanced applications does not require extremely costly robot technology. All that is needed is simply the knowledge of which technologies are out there and how best to use each of them. Each chapter in this book will introduce one of these different technologies and discuss how best to use it in a robotics application. On the hardware side, we’ll cover microcontrollers, servos, and sensors, hopefully inspiring you to design your own awe-inspiring, next-generation systems. On the software side, we’ll cover programming languages, debugging, algorithms, and state machines. We’ll focus on the Arduino, the Parallax Propeller, Revolution Education PICAXE and projects I’ve with which I’ve been involved, including the TBot educational robot, the PropScope oscilloscope, the 12Blocks visual programming language, and the ViewPort development environment. In addition, we’ll serve up a comprehensive introduction to a variety of essential topics, including output (e.g. LEDs, servo motors), and communication technologies (e.g. infrared, audio), that you can use to develop systems that interact to stimuli and communicate with humans and other robots. To make these topics as accessible as possible, handy schematics, sample code and practical tips regarding building and debugging have been included. Hanno Sander Christchurch, New Zealand
€ 24,95
Membres : € 22,46