Pouvez-vous utiliser le SparkFun Top pHAT pour prototyper l'apprentissage machine sur votre Raspberry Pi 4, NVIDIA Jetson, Google Coral ou un autre ordinateur monocarte ? Sans aucun doute! Le système pHAT SparkFun Top prend en charge les interactions d'apprentissage machine, notamment la commande vocale avec microphones et haut-parleurs de bord, l'affichage graphique pour la rétroaction de contrôle de la caméra et l'accès sans entrave au connecteur de la caméra RPi. De plus, vous pouvez utiliser les boutons programmables, la manette et la DEL RVB pour les E/S définies par l'utilisateur, l'interaction dynamique du système ou l'affichage de l'état du système.Pouvez-vous l'utiliser comme interface pour présenter votre projet à l'écosystème SparkFun Qwiic ? En effet ! En plus de toutes les fonctionnalités précédentes, nous avons également inclus un connecteur Qwiic pour permettre une intégration facile sur I2C. Des milliards de combinaisons de cartes compatibles Qwiic sont à votre disposition pour développer les capacités du SparkFun Top pHAT.Avec toute l'interaction E/S sur cette carte et le manque de soudure nécessaire pour se mettre en marche, le SparkFun Top pHAT est le complément d'apprentissage machine fondamental pour Raspberry Pi ou tout 2x20 GPIO SBC !Caractéristiques :Un pHAT Raspberry Pi qui se concentre sur l'interaction utilisateur avec un SBC/RPi.Soutien des interactions d'apprentissage automatiqueCommande vocale (microphones, haut-parleurs)Affichage graphique sur TFT couleur 2.4''Deux boutons programmables pour les E/S définies par l'utilisateurJoystick programmable – pour une interaction dynamique avec le système (menus GUI, conduite de robot).DEL RVB programmables – pour l'état du système, affichage.N'empêche pas l'accès à la caméra RPi ou au connecteur d'affichageInterrupteur marche/arrêt pour Rpi.Prend en charge l'accès à l'écosystème Qwiic SparkFunDestiné à être au sommet d'une pile pHAT - pas de broches pour empiler sur le dessus de cette carte. C'est le Top pHAT!
Le SparkFun Power Delivery Board utilise un contrôleur autonome pour négocier avec les adaptateurs d’alimentation et passer à une tension supérieure autre que 5V. Il utilise le même adaptateur d’alimentation pour différents projets plutôt que de compter sur plusieurs adaptateurs d’alimentation pour fournir une sortie différente; il peut fournir la carte dans le cadre du système de connexion Qwiic de SparkFun, de sorte que vous n’aurez pas à faire de soudure pour comprendre comment les choses sont orientées. Le SparkFun Power Delivery Board tire parti de la norme de distribution d’alimentation à l’aide d’un contrôleur autonome de STMicroelectronics, le STUSB4500. Le STUSB4500 est un contrôleur de distribution d’alimentation USB qui traite les appareils récepteur de données. Il met en œuvre un algorithme propriétaire pour négocier un contrat de distribution d’électricité avec une source (c.-à-d. une prise murale de distribution d’électricité ou un adaptateur d’alimentation) sans avoir besoin d’un microcontrôleur externe. Cependant, vous aurez besoin d’un microcontrôleur pour configurer la carte. Les profils PDO sont configurés dans une mémoire non volatile intégrée. Le contrôleur fait tout le poids de la négociation de puissance et fournit un moyen facile de configurer sur I2C. Pour configurer la carte, vous aurez besoin d’un bus I2C. Le système Qwiic facilite la connexion de la carte d’alimentation à un microcontrôleur. Selon votre application, vous pouvez également vous connecter au bus I2C via les trous SDA et SCL. Caractéristiques : Plage de tension d’entrée et de sortie de 5-20V Courant de sortie jusqu’à 5A Trois profils d’alimentation configurables Commande automatique de l’évier Type-C™ et USB PD Certifié USB Type-C™ rév. 1.2 et USB PD rév. 2.0 (TID n° 1000133) Surveillance intégrée de la tension VBUS Pilotes de porte de commutation VBUS intégrés (PMOS)'
Le lecteur/capteur d'empreintes digitales capacitif Grove est basé sur le module de reconnaissance d'empreintes digitales KCT203 Semiconductor, comprenant un microcontroleur performant, un capteur d'empreintes digitales poussoir RF vertical et un dispositif de détection tactile. Ce module présente de nombreux avantages tels que la petite taille, le modèle d'empreinte digitale, la faible consommation d'énergie, la haute fiabilité, la reconnaissance rapide des empreintes digitales, etc. En outre, il convient de mentionner qu'il y a une belle lumière RGB autour de ce module pour indiquer si la reconnaissance des empreintes digitales est réussie. Le système est équipé d'un algorithme d'empreintes digitales très performant, et la fonction d'auto-apprentissage est remarquable. Après chaque reconnaissance d'empreintes digitales réussie, les dernières valeurs de caractéristiques de défi peuvent être intégrées dans la base de données d'empreintes digitales pour améliorer continuellement les caractéristiques des empreintes digitales, ce qui rend l'expérience meilleure. Applications Dispositifs de verrouillage par empreinte digitale : serrures de porte, coffres-forts, antivols de volant, cadenas, antivols pour armes à feu, etc. Signature par empreinte digitale, système de contrôle d'accès Spécifications CPU GD32 Mémorisation des modèles d'empreintes digitales Max. 100 Connecteur Grove UART Résolution du capteur 508 DPI Pixel du capteur 160 x 160 Taux de faux rejets Taux de fausses acceptations Temps de réponse de la correspondance (mode 1:N) Temps de réponse de la correspondance (mode 1:1) Taille du capteur Φ 14,9 mm Taille du cadre Φ 19 mm Consommation d'énergie Vitesse maximale : ≤40 mA ; veille : ≤ 12 uA Tension de fonctionnement 3,3 V / 5 V Température de fonctionnement -20 ~ 70 ℃ Protection ESD Non-contact 15 KV, contact 8 KV Inclus 1 x Module de reconnaissance d'empreintes digitales à semi-conducteurs KCT203 1 x Câble du capteur 1 x Câble Grove 1x Carte pilote Grove Documentations Fichier eagle du lecteur/capteur d'empreintes digitales capacitif Grove Programme pour le lecteur/capteur d'empreintes digitales capacitif Wiki
Raspberry Pi 5 fournit deux connecteurs MIPI à quatre voies, chacun pouvant prendre en charge une caméra ou un écran. Ces connecteurs utilisent le même format FPC « mini » à 22 voies au pas de 0,5 mm que le kit de développement de module de calcul et nécessitent des câbles adaptateurs pour se connecter aux connecteurs au format « standard » à 15 voies au pas de 1 mm du Raspbery Pi actuel. produits d'appareil photo et d'affichage.
Ces câbles adaptateurs mini vers standard pour caméras et écrans (notez qu'un câble de caméra ne doit pas être utilisé avec un écran, et vice versa) sont disponibles en longueurs de 200 mm, 300 mm et 500 mm.
Un écran IdO de 2,7 pouces à faible consommation et à source ouverte, alimenté par un module ESP32-S2 et doté de la technologie Memory-in-Pixel (MiP) de SHARP. Le Newt est un écran mural alimenté par piles, toujours allumé, qui peut aller en ligne pour récupérer la météo, les calendriers, les résultats sportifs, les listes de choses à faire, les citations... vraiment tout ce qui se trouve sur Internet ! Il utilise un microcontrôleur ESP32-S2 que vous pouvez programmer avec Arduino, CircuitPython, MicroPython ou ESP-IDF. Il est parfait pour les makers : La technologie Memory-in-Pixel (MiP, mémoire dans les pixels) de Sharp évite les temps de rafraîchissement lents associés aux écrans E-Ink. Une horloge en temps réel a été ajoutée pour prendre en charge les minuteries et les alarmes. Le Newt a été conçu en tenant compte du fonctionnement sur batterie ; chaque composant a été choisi pour sa capacité à fonctionner à faible puissance. Le Newt a été conçu pour fonctionner « sans fil », ce qui signifie qu'il peut être installé dans des endroits où un cordon d'alimentation ne serait pas pratique, par exemple un mur, un réfrigérateur, un miroir ou un tableau effaçable à sec. Avec le support optionnel, les bureaux, les étagères et les tables de nuit sont également de bonnes options. Il est open source, et tous les fichiers et bibliothèques de conception sont disponibles pour examen, utilisation et modification. Toutefois, cela n'est pas obligatoire. Chacun est livré avec un logiciel fonctionnel comportant les fonctions suivantes : Détails de la météo actuelle Prévisions météorologiques horaires et quotidiennes Alarme Minuteur Citations inspirantes Prévision de la qualité de l’air Calendrier des habitudes Minuteur Pomodoro Carte de stratégie oblique Pour l’utiliser, il suffit de suivre les instructions pour le connecter au Wi-Fi. Aucun téléchargement d'application n'est nécessaire. Spécifications Affichage LCD à mémoire vive Taille de l’écran 2,7 pouces Résolution 240 x 400 Courant de veille 30 μA Taux de rafraichissement Rafraîchissement périodique de l'écran requis Non Boutons d’entrée 10 boutons capacitifs, 1 bouton-poussoir RTC inclus Oui Haut-parleurs inclus Oui Entrée d’alimentation USB Type-C Batterie incluse Non Languages de programmation Arduino, CircuitPython, ESP IDF, MicroPython Dimensions 91 x 61 x 9 mm Microcontrôleur Module expressif ESP32-S2-WROVER avec 4 Mo de flash et 2 Mo de PSRAM Compatible Wi-Fi Supporte Arduino, MicroPython, CircuitPython, et ESP-IDF Courant de veille profonde aussi faible que 25 μA Affichage Mémoire en pixels LCD 2,7 pouces, 240 x 400 pixels Capable de fournir un contenu à haut contraste, haute résolution et faible latence avec une consommation d’énergie ultra-faible Le mode réfléchissant exploite la lumière ambiante pour éliminer le besoin d’un rétroéclairage Chronométrage, minuteries et alarmes Horloge temps reel (RTC) Micro Crystal RV-3028-C7 Optimisé pour une consommation extrêmement faible (45 μA) Capable de gérer simultanément une minuterie périodique, un compte à rebours et une alarme Interruption matérielle pour les minuteries et les alarmes 43 octets de mémoire utilisateur non volatile, 2 octets de RAM utilisateur Compteur de temps UNIX séparé Audio Haut-parleur/ronfleur avec mini amplificateur classe D sur la sortie A0 du CNA, pouvant jouer des tonalités ou des clips audio lo-fi. Entrée utilisateur Interrupteur d’alimentation Deux boutons tactiles programmables pour réinitialiser et démarrer 10 pavés tactiles capacitifs Alimentation Newt est conçu pour fonctionner pendant un à deux mois entre les charges en utilisant une batterie lipo de 500 mAh. Cette durée varie (une utilisation intensive du Wi-Fi, en particulier, déchargera plus rapidement la batterie). Connecteur USB de type C pour la programmation, l'alimentation et la charge Régulateur de tension à mode de fonctionnement vert (TOREX XC6220) qui peut sortir 1 A de courant et fonctionner à partir de 8 μA Connecteur JST pour une batterie Lithium-Ion Chargeur de batterie (MCP73831) Indicateur de batterie faible (courant de repos de 1 μA) Logiciel Le matériel Newt est compatible avec les bibliothèques open source Arduino pour ESP32-S2, Adafruit GFX (polices de caractères), Adafruit Sharp Memory Display, et RTC RV-3028-C7 (RTC) Les bibliothèques Arduino et les exemples de programmation sont disponibles dans le dépôt GitHub du fabricant Les bibliothèques CircuitPython et l'enregistrement sont sur la feuille de route, incluant une bibliothèque CircuitPython pour l'horloge en temps réel RV-3028 Inclus dans le colis Phambili Newt – entièrement assemblé avec firmware préchargé Support de bureau découpé au laser Pieds à mini-aimant La visserie nécessaire Support et documentation Instructions complètes d’utilisation (En anglais) GitHub: bibliothèque et base de code Arduino (En anglais) GitHub: schémas de la carte (En anglais) Vidéos de prototypes ou de démonstrations (build tracked on Hackaday. En anglais)
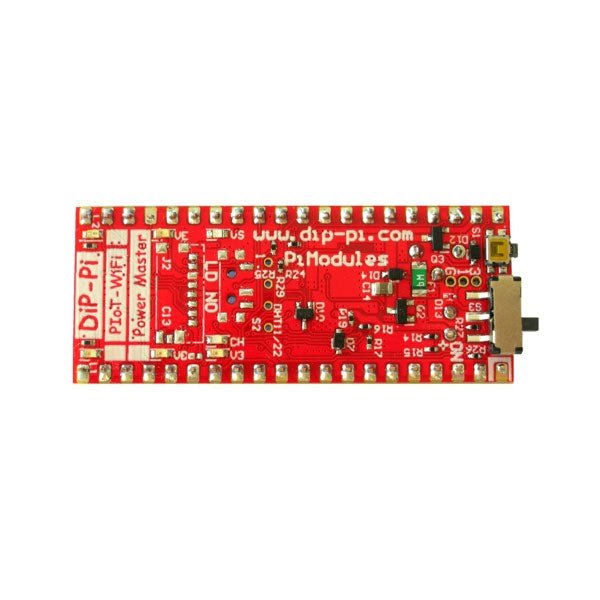
Le DiP-Pi Power Master est un système d'alimentation avancé avec des interfaces de capteurs intégrées qui couvrent la plupart des besoins possibles pour les applications basées sur Raspberry Pi Pico. Il peut fournir au système jusqu'à 1,5 A à 4,8 V délivrés de 6 à 18 V CC sur divers schémas d'alimentation comme les voitures, les installations industrielles, etc., en plus du micro-USB d'origine du Raspberry Pi Pico. Il prend en charge la batterie LiPo ou Li-Ion avec chargeur automatique ainsi que la commutation automatique de l'alimentation par câble à l'alimentation par batterie ou inversement (fonctionnalité UPS) en cas de perte d'alimentation par câble. La source d'alimentation étendue (EPR) est protégée par un fusible réinitialisable PPTC, à polarité inversée, ainsi que par ESD. Le DiP-Pi Power Master contient un bouton RESET intégré au Raspberry Pi Pico ainsi qu'un interrupteur coulissant ON/OFF qui agit sur toutes les sources d'alimentation (USB, EPR ou batterie). L'utilisateur peut surveiller (via les broches A/D du Raspberry Pi Pico) le niveau de la batterie et le niveau EPR avec les convertisseurs A/D de PICO. Les deux entrées A/D sont pontées avec des résistances 0402 (0 OHM), donc si pour une raison quelconque l'utilisateur a besoin d'utiliser ces broches Pico pour sa propre application, elles peuvent être facilement retirées. Le chargeur charge automatiquement la batterie connectée (si utilisée), mais l'utilisateur peut en outre allumer/éteindre le chargeur si son application en a besoin. DiP-Pi Power Master peut être utilisé pour les systèmes alimentés par câble, mais également pour les systèmes purement alimentés par batterie avec ON/OFF. L'état de chaque source d'alimentation est indiqué par des LED informatives distinctes (VBUS, VSYS, VEPR, CHGR, V3V3). L'utilisateur peut utiliser n'importe quelle capacité de type LiPo ou Li-Ion ; Cependant, il faut veiller à utiliser des batteries protégées par PCB avec un courant de décharge maximum autorisé de 2 A. Le chargeur de batterie intégré est configuré pour charger la batterie avec un courant de 240 mA. Ce courant est réglé par une résistance, donc si l'utilisateur a besoin de plus/moins, il peut le changer lui-même.
En plus de toutes les fonctionnalités ci-dessus, le DiP-Pi Power Master est équipé d'interfaces de capteurs 1 fil et DHT11/22 intégrées. La combinaison des interfaces étendues d'alimentation, de batterie et de capteurs rend le DiP-Pi Power Master idéal pour les applications telles que l'enregistreur de données, la surveillance des usines, la surveillance des réfrigérateurs, etc.
DiP-Pi Power Master est pris en charge avec de nombreux exemples prêts à l'emploi écrits en Micro Python ou C/C++.
Caractéristiques
Général
Dimensions 21 x 51 mm
Compatible avec le brochage Raspberry Pi Pico
LED informatives indépendantes (VBUS, VSYS, VEPR, CHGR, V3V3)
Bouton RESET du Raspberry Pi Pico
Interrupteur à glissière ON/OFF agissant sur toutes les sources d'alimentation (USB, EPR, Batterie)
Alimentation externe 6-18 V DC (voitures, applications industrielles, etc.)
Surveillance du niveau d'alimentation externe (6-18 VCC)
Surveillance du niveau de batterie
Protection contre l'inversion de polarité
Protection par fusible PPTC
Protection ESD
Chargeur de batterie automatique (pour LiPo, Li-Ion protégé par PCB – 2 A Max) Automatique/Contrôle utilisateur
Passage automatique de l'alimentation par câble à l'alimentation par batterie et inversement (fonctionnalité UPS)
Différents schémas d'alimentation peuvent être utilisés simultanément avec l'alimentation USB, l'alimentation externe et l'alimentation par batterie.
Convertisseur Buck 1,5 A à 4,8 V sur EPR
LDO intégré de 3,3 V à 600 mA
Interface 1 fil intégrée
Interface DHT-11/22 intégrée
Options d'alimentation
Raspberry Pi Pico micro USB (via VBUS)
Alimentation externe 6-18 V (via prise dédiée – 3,4/1,3 mm)
Batterie externe
Types de batteries pris en charge
LiPo avec PCB de protection courant max 2A
Li-Ion avec PCB de protection courant max 2A
Périphériques et interfaces intégrés
Interface 1 fil intégrée
Interface DHT-11/22 intégrée
Interface de programmation
Raspberry Pi standard Pico C/C++
Raspberry Pi standard Pico Micro Python
Compatibilité des cas
Boîtier DiP-Pi Plexi-Cut
Surveillance du système
Niveau de batterie via Raspberry Pi Pico ADC0 (GP26)
Niveau EPR via Raspberry Pi Pico ADC1 (GP27)
LED informatives
VB (VUSB)
États-Unis (VSYS)
VE (VEPR)
CH (VCHR)
V3 (V3V3)
Protection du système
Bouton de réinitialisation matérielle instantanée Raspberry Pi Pico
Protection ESD sur EPR
Protection contre l'inversion de polarité sur l'EPR
Fusible PPTC 500 mA @ 18 V sur EPR
Protection contre la surchauffe EPR/LDO
EPR/LDO À propos de la protection actuelle
Conception du système
Conçu et simulé avec PDA Analyzer avec l'un des outils CAO/FAO les plus avancés – Altium Designer
Origine industrielle
Construction de circuits imprimés
PCB de 2 oz en cuivre fabriqué pour une alimentation et un refroidissement appropriés en courant élevé
Technologie de piste de 6 mils/écart de 6 mils PCB à 2 couches
Finition de surface de PCB – Immersion Gold
Tuyaux thermiques en cuivre multicouche pour une réponse thermique accrue du système et un meilleur refroidissement passif
Téléchargements
Fiche de données
Fiche de données
LuckFox Pico Mini est une micro-carte de développement Linux compacte basée sur la puce Rockchip RV1103, offrant une plate-forme de développement simple et efficace pour les développeurs. Il prend en charge une variété d'interfaces, notamment MIPI CSI, GPIO, UART, SPI, I²C, USB, etc., ce qui est pratique pour un développement et un débogage rapides.
Caractéristiques
Cœur ARM Cortex-A7 monocœur 32 bits avec NEON et FPU intégrés
Le NPU de 4e génération intégré, développé par Rockchip, offre une précision de calcul élevée et prend en charge la quantification hybride int, int8 et int16. La puissance de calcul d'int8 est de 0,5 TOPS, et jusqu'à 1,0 TOPS avec int4
ISP3.2 de troisième génération intégré et auto-développé, prend en charge 4 mégapixels, avec plusieurs algorithmes d'amélioration et de correction d'image tels que HDR, WDR, réduction du bruit à plusieurs niveaux, etc.
Offre de puissantes performances d'encodage, prend en charge le mode d'encodage intelligent et l'économie de flux adaptative en fonction de la scène, permet d'économiser plus de 50% du débit binaire du mode CBR conventionnel afin que les images de la caméra soient en haute définition avec une taille plus petite, et doublent le stockage. espace
Le microcontrôleur RISC-V intégré prend en charge une faible consommation d'énergie et un démarrage rapide, prend en charge une capture d'image rapide de 250 ms et charge simultanément la bibliothèque de modèles AI pour réaliser la reconnaissance faciale "en une seconde"
DRAM DDR2 16 bits intégrée, capable de supporter des bandes passantes mémoire exigeantes
Intégré avec POR intégré, codec audio et MAC PHY
Spécifications
Processeur
ARM Cortex-A7, processeur monocœur 32 bits, 1,2 GHz, avec NEON et FPU
NPU
NPU Rockchip 4e génération, prend en charge int4, int8, int16 ; jusqu'à 1.0 TOPS (int4)
ISP
ISP3.2 de troisième génération, entrée jusqu'à 4 MP à 30 ips, HDR, WDR, réduction du bruit
RAM
64 Mo DDR2
Stockage
Flash SPI NAND de 128 Mo
USB
Hôte/périphérique USB 2.0 via Type-C
Interface de la caméra
MIPI CSI 2 voies
Broches GPIO
17 broches GPIO
Consommation électrique
MCU RISC-V à faible consommation pour un démarrage rapide
Dimensions
28 x 21 mm
Téléchargements
Wiki
Ce kit est basé sur ESP32 et LoRa. L'écran ESP32 3,5' est la console du système, il reçoit le message LoRa des capteurs d'humidité LoRa (prend en charge jusqu'à 8 capteurs dans le firmware par défaut) et envoie des commandes de contrôle au MOSFET LoRa à 4 canaux (2 MOSFET à 4 canaux pris en charge , avec un total de 8 canaux), pour contrôler l'ouverture/fermeture des vannes connectées, et ainsi contrôler l'irrigation de plusieurs points.
Caractéristiques
Prêt à l'emploi : les micrologiciels sont préprogrammés pour tous les modules avant l'expédition, l'utilisateur peut uniquement les mettre sous tension, définir l'ID de la console et commencer à l'utiliser. Convient à aucun programmeur, en 3 minutes pour créer une application déposée.
Avec connexion sans fil Lora : la portée du moniteur et du contrôle peut aller jusqu'à quelques kilomètres, adaptée au jardin/petite ferme.
Capteur d'humidité du sol avec une bonne résistance à la corrosion , peut être utilisé au moins six mois avec 2 piles AAA.
Facile à installer : comparé à une solution bon marché avec des fils, qui est difficile à mettre en œuvre dans une application de fichiers, les fils de connexion ne sont pas nécessaires, l'ensemble de l'installation est propre et facile ; Les vannes peuvent être facilement connectées au Lora MOSFET.
Matériel et logiciels ouverts : pour étudier Lora et FreeRTOS. La console d'affichage ESP32/le capteur d'humidité du sol Lora/LoRa MOSFE sont tous programmés avec Arduino. Pour les programmeurs/ingénieurs, peut développer d’autres applications plus spécialisées.
Basée sur ESP32, avec connexion WiFi, la console peut également accéder à Internet, créer beaucoup plus d'applications, notamment la mise à jour des données d'humidité sur Internet pour un moniteur à distance et le contrôle à distance avec MQTT.
Inclus
1x écran ESP32 3,5' (sans caméra)
1x extension Lora pour écran ESP32
2x capteur d'humidité Lora
1x MOSFET Lora à 4 canaux
1x alimentation 12V
Conduite d'eau (5m)
1x joint de tuyau à 1 entrée et 4 sorties
Téléchargements
Instructable : Surveillance des sols et irrigation avec LoRa
GitHub
Cette carte d'extension vous permet d'ajouter une interface RS485 et CAN à un Raspberry Pi Pico.
La carte offre également la possibilité de la faire fonctionner soit via une connexion USB-C standard de 5 V, soit via une borne à vis acceptant une tension de 6 à 12 V. La tension appliquée à la borne à vis est réduite à 5 V par un convertisseur de tension intégré à la carte.
Caractéristiques
L'alimentation peut être fournie via une connexion USB-C de 5 V ou via une borne à vis qui consomme entre 6 et 12 V. Dans ce dernier cas, un convertisseur de tension intégré réduit la tension à 5 V.
Pour augmenter la polyvalence et la gamme de fonctions, les broches de connexion du Raspberry Pi Pico ont été acheminées vers l'extérieur.
La carte d'extension offre également la possibilité de communiquer via les interfaces RS485 et CAN.
Spécifications
Interface CAN
SPI, CAN
Interface RS485
Série, RS485
Alimentation
5 V CC (USB-C)
Borne à vis
6-12 V CC
Niveau logique
3,3 V
Résistance de terminaison CAN
120 Ω (peut être activé et désactivé selon les besoins)
Résistance de terminaison RS485
120 Ω (peut être activé et désactivé selon les besoins)
Le capteur SDS011 détermine la concentration de particules de poussière dans l'air à l'aide de la méthode de la lumière diffusée.
L'adaptateur USB-UART permet également de lire le capteur directement via le port USB d'un ordinateur.
Caractéristiques
Interface
UART (niveau 3,3 V)
Résolution
0,3 µg/m3
Temps de réponse
<10s
Autres caractéristiques
Ventilateur intégré
Courant au ralenti
<4mA
Courant d'alimentation
70mA
Tension de fonctionnement
5 V
Dimensions
70x70x24mm
Poids
70g
Inclus
1x capteur de poussière SDS011 1x câble de connexion
1x adaptateur USB-UART
Téléchargements
Fiche de données
Manuel
La carte Motorino est une carte d'extension permettant de contrôler et d'utiliser jusqu'à 16 servomoteurs 5 V contrôlés par PWM.
Le générateur d'horloge inclus fournit un signal PWM très précis et un positionnement très précis. La carte dispose de 2 entrées pour une tension de 4,8 V à 6 V qui peuvent être utilisées pour un maximum de 11 A. Avec cette entrée, une alimentation électrique parfaite est toujours garantie et même les projets les plus importants ne posent aucun problème.
L'alimentation électrique passe directement par le Motorino, qui fournit une connexion pour la tension, la terre et le contrôle.
Le condensateur intégré tamponne la tension, ce qui évite une chute soudaine de tension en cas de charge élevée. Mais il existe également la possibilité de connecter un autre condensateur.
Le contrôle et la programmation peuvent être effectués, comme d'habitude, avec l'Arduino. Les manuels et les exemples de code permettent une introduction rapide pour les débutants.
Fonctionnalités spéciales
16 canaux, propre générateur d'horloge
Entrée 1
Connecteur d'alimentation coaxial 5,5 / 2,1 mm, 4,8-6 V / 5 A max
Entrée 2
Bornier à vis, 4,8-6 V / 6 A max
Communication
16xPWM
Compatible avec
Microcontrôleur Arduino Uno, Mega et peut-être plus avec brochage compatible Arduino
Dimensions
69x24x56mm
Portée
Carton, manuel, emballage de vente au détail
Caractéristiques
Taille
23,2 x 12,5 x 22 mm
Poids
9g
Type d'engrenage
Équipement en plastique (Nylon et POM)
Angle limite
120
Palier Pas de roulements à billes
Cannelure d'engrenage de klaxon
20T (4,8 mm)
Type de klaxon
Plastique, POM
Cas
Nylon et fibre de verre
Fil de connecteur
200mm
Moteur
Moteur à balais métalliques
Résistance à l'eau
Non
Inclus
1x servomoteur FeeTech FS90
1x klaxon de servo droit à une extrémité
1x klaxon de servo droit à double extrémité
1x klaxon de servo droit à double extrémité ailé
1x klaxon de servo étoile à quatre branches
1x klaxon de servo rond
1x vis de klaxon de servo
2x vis de montage du servo FS90
Téléchargements
Mode d'emploi
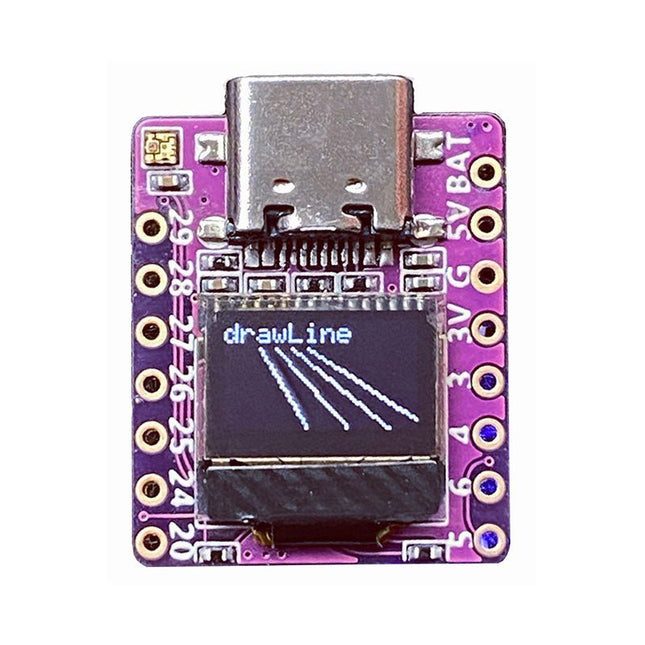
Carte de développement compacte compatible Arduino, MicroPython et CircuitPython alimentée par Raspberry Pi RP2040
RP2040-0.42LCD est une carte de développement hautes performances avec écran LCD intégré de 0,42' (résolution 70x40) avec interfaces numériques flexibles.
Il intègre la puce du microcontrôleur RP2040 du Raspberry Pi. Le RP2040 est doté d'un processeur Arm Cortex-M0+ double cœur cadencé à 133 MHz avec 264 Ko de SRAM interne et 2 Mo de stockage flash.
Caractéristiques
SoC
Microcontrôleur Raspberry Pi RP2040 double cœur Cortex-M0+ jusqu'à 125 MHz, avec 264 Ko de SRAM
Stockage
Flash SPI de 2 Mo
Afficher
OLED de 0,42 pouce
USB
1x port USB Type-C pour l'alimentation et la programmation
Expansion
– Connecteur Qwiic I²C – Embases à 7 et 8 broches avec jusqu'à 11x GPIO, 2x SPI, 2x I²C, 4x ADC, 1x UART, 5 V, 3,3 V, VBAT, GND
Divers
– Boutons de réinitialisation et de démarrage – LED RVB, LED d'alimentation
Source de courant
– 5 V via port USB-C ou Vin - Broche VBAT pour l'entrée de la batterie – Régulateur 3,3 V avec sortie crête 500 mA
Dimensions
23,5x18mm
Poids
2,5g
Téléchargements
GitHub
Caractéristiques:
Écran TFT IPS de 1,54 pouces avec une résolution de 240 x 240 pouvant afficher du texte ou des vidéos
Ports de haut-parleurs stéréo pour la lecture audio – synthèse vocale, alertes ou pour créer un assistant vocal.
Sortie casque stéréo pour la lecture audio via un système stéréo, des écouteurs ou des haut-parleurs amplifiés. Entrée microphone stéréo - parfaite pour créer vos propres assistants domestiques intelligents
Deux connecteurs JST STEMMA 3 broches pouvant être utilisés pour connecter plus de boutons, un relais, ou même quelques NeoPixels !
Le port I2C plug-and-play STEMMA QT peut être utilisé avec n'importe laquelle des cartes Adafruits 50+ I2C STEMMA QT ou peut être utilisé pour se connecter aux appareils Grove I2C avec un câble adaptateur.
Joystick 5 directions + bouton pour l'interface utilisateur et le contrôle.
Trois LED RVB DotStar pour un retour LED coloré.
Le port STEMMA QT signifie que vous pouvez connecter des capteurs d'image thermique comme le Panasonic Grid-EYE ou le MLX90640. Les caméras sensibles à la chaleur peuvent être utilisées comme détecteur de personne, même dans l'obscurité ! Un accéléromètre externe peut être fixé pour la détection de gestes ou de vibrations, tels que les projets de maintenance prédictive de machines/industries.
Attention : un Raspberry Pi 4 n'est pas inclus.
YDLIDAR X4PRO est un télémètre bidimensionnel à 360 degrés. Basé sur le principe de la triangulation, il est équipé d'une optique, d'une électronique et d'une conception algorithmique associées pour atteindre une mesure de distance haute fréquence et haute précision. La structure mécanique tourne à 360 degrés pour produire en continu les informations d'angle ainsi que les données du nuage de points de l'environnement balayé tout en mesurant les distances.
Caractéristiques
Mesure de distance de balayage omnidirectionnel à 360 degrés
Erreur de distance réduite, performances stables et grande précision
Large plage de mesure
Grande résistance aux interférences lumineuses ambiantes
Consommation d'énergie réduite, petite taille et longue durée de vie
Puissance laser conforme aux normes de sécurité laser de Classe I
Vitesse du moteur réglable, fréquence de balayage de 6 à 12 Hz
Mesure de distance rapide, fréquence de mesure allant jusqu'à 5 kHz
Applications
Navigation et évitement d'obstacles pour les robots
Enseignement et recherche ROS pour les robots
Sécurité régionale
Numérisation de l'environnement et reconstruction 3D
Navigation et évitement d'obstacles pour les robots aspirateurs/robots d'apprentissage ROS
Spécifications
Fréquence de mesure
5000 Hz
Fréquence de balayage
6-12 Hz
Distance de mesure
0,12 à 10 m
Angle de balayage
360°
Résolution d'angle
0,43-0,85°
Dimensions
110,6 x 71,1 x 52,3 mm
Téléchargements
Fiche technique
Manuel de l'utilisateur
Manuel de développement
SDK
Outil
ROS
Cette caméra adopte la technologie d'imagerie 3D à lumière structurée binoculaire pour obtenir des images de profondeur et réaliser la fonction de modélisation des informations de profondeur. Il est équipé d'une puce de calcul de profondeur dédiée et est spécialement optimisé pour éviter les obstacles des robots. La caméra est de taille compacte, facile à intégrer, avec une interface de sortie standard USB2.0, offrant aux utilisateurs un haut degré de flexibilité. Il peut être adapté à des environnements complexes tels que des environnements entièrement noirs, en intérieur avec une lumière forte ou une lumière faible, un contre-jour ou une lumière douce, même en semi-extérieur, ce qui présente une large gamme d'applications.
Caractéristiques
Offre une sortie d’image haute résolution de 1 280 x 920
Utilise la technologie d'imagerie 3D à lumière structurée binoculaire
Interférence intrépide de la lumière ambiante
Les processeurs de calcul approfondi utilisent des puces dédiées hautes performances
Interface de sortie standard USB2.0
Caractéristiques
Distance de détection : 20-250 cm
Erreur de précision : <1,5 cm
Résolution : 1280 x 920 pixels
VOHF : 78 ±3°
FOV : 60 ±3°
Puissance : 1,5 W
Source de lumière active : Spectre : 830-850 nm | Puissance : <1,5 W
Anti-poussière et étanche : IP65
ESD : Décharge par contact : ±8 KV | Antiaérien : ±12 KV
Interface : USB2.0
Température de fonctionnement : -10 ~ 50 °C
Humidité de fonctionnement : 0 ~ 80 RH
Température de stockage : -20 ~ 80 °C
Poids : 96g
Téléchargements
Fiche de données
Manuel de l'Utilisateur
Manuel de développement
SDK
Outil
ROS
Après la mise sous tension, le YDLIDAR G4 commence à tourner et à scanner l'environnement environnant. La distance de numérisation est de 16 m et l'appareil a une vitesse de numérisation de 9 000 fois par seconde.
Il analyse minutieusement son environnement et peut y détecter les plus petits objets. Grâce à son moteur sans balais extrêmement précis et à son disque codeur montés sur roulements, il fonctionne très bien et a une durée de vie allant jusqu'à 500 000 heures de fonctionnement.
Le G4 est une solution peu coûteuse pour les projets nécessitant une détection d'obstacles, un évitement d'obstacles et/ou une localisation et une cartographie simultanées (SLAM). Tous les produits YDLIDAR sont prêts pour ROS.
Caractéristiques
Scanner 2D à 360 degrés
Performances stables, haute précision
Portée de 16 m Forte protection contre les interférences de la lumière ambiante
Entraînement par moteur sans balais, performances stables
Norme de sécurité laser FDA Classe I
Balayage omnidirectionnel à 360 degrés, fréquence de balayage adaptative de 5 à 12 Hz
Technologie optomagnétique
Communication de données sans fil
Vitesse de numérisation de 9 000 Hz
Documentation
Lecteur ROS
Page de téléchargement d'Ydlidar
Dans la section « Téléchargements » ci-dessous, vous trouverez la fiche technique ainsi que les manuels d'utilisation et de développement.
La SparkFun Thing Plus Matter est la première carte facilement accessible de ce type qui combine Matter et l'écosystème Qwiic de SparkFun pour le développement agile et le prototypage de dispositifs IoT basés sur Matter. Le module sans fil MGM240P de Silicon Labs offre une connectivité sécurisée pour les deux protocoles 802.15.4 avec communication Mesh (Thread) et Bluetooth Low Energy 5.3. Le module est prêt à être intégré au protocole Matter IoT de Silicon Labs pour la domotique.
Qu'est-ce que Matter ? En termes simples, Matter permet un fonctionnement cohérent entre les appareils domestiques intelligents et les plateformes IoT sans connexion Internet, même s'ils proviennent de fournisseurs différents. Ce faisant, Matter est capable de communiquer entre les principaux écosystèmes IoT afin de créer un protocole sans fil unique, facile à utiliser, fiable et sécurisé.
La Thing Plus Matter (MGM240P) comprend des connecteurs Qwiic et de batterie LiPo, ainsi que plusieurs connecteurs GPIO capables d'un multiplexage complet par le biais d'un logiciel. La carte comprend également le chargeur LiPo monocellulaire MCP73831 ainsi que la jauge de carburant MAX17048 pour charger et surveiller une batterie connectée. Enfin, un emplacement pour carte µSD est intégré pour tout besoin de mémoire externe.
Le module sans fil MGM240P est construit autour du SoC sans fil EFR32MG24 avec un processeur ARM Cortex-M33 à 32 bits fonctionnant à 39 MHz avec 1536 kb de mémoire Flash et 256 kb de RAM. Le MGM240P fonctionne avec les protocoles sans fil 802.15.4 courants (Matter, ZigBee et OpenThread) ainsi qu'avec Bluetooth Low Energy 5.3. Le MGM240P supporte le Secure Vault de Silicon Labs pour les applications Thread.
Spécifications
Module sans fil MGM240P
Construit autour du SoC sans fil EFR32MG24
Processeur Cœur ARM Cortex-M33 32 bits (@ 39 MHz)
Mémoire flash de 1536 Ko
256 Ko de RAM
Prise en charge de plusieurs protocoles sans fil 802.15.4 (ZigBee et OpenThread)
Bluetooth Low Energy 5.3
Prêt pour Matter
Prise en charge de Secure Vault
Antenne intégrée
Facteur de forme Thing Plus (compatible avec les fibres) :
Dimensions : 5,8 x 2,3 cm (2,30 x 0,9')2 5,8 x 2,3 cm (2,30 x 0,9')
2 trous de fixation :
compatible avec les vis 4-40
21 sorties GPIO
Tous les connecteurs ont une capacité de multiplexage complète par logiciel
Interfaces SPI, I²C et UART mappées par défaut sur les connecteurs étiquetés.
13 GPIO (6 étiquetés comme analogiques, 7 étiquetés comme GPIO)
Toutes les fonctions sont soit GPIO, soit analogiques.
Convertisseur numérique-analogique intégré (DAC)
Connecteur USB-C
Connecteur de batterie LiPo JST à 2 broches pour une batterie LiPo (non incluse)
Connecteur JST Qwiic 4 broches
Chargeur LiPo monocellulaire MC73831
Taux de charge configurable (500 mA par défaut, 100 mA en alternance)
MAX17048 Jauge de carburant LiPo monocellulaire
Emplacement pour carte µSD
Faible consommation d'énergie (15 µA lorsque le MGM240P est en mode faible consommation)
LED:
PWR - LED rouge d'alimentation
CHG - Voyant jaune d'état de charge de la batterie
STAT - Voyant d'état bleu
Bouton de réinitialisation :
Bouton-poussoir physique
Le signal de réinitialisation peut être lié à A0 pour permettre une utilisation en tant que périphérique.
Téléchargements
Schematic
Eagle Files
Board Dimensions
Hookup Guide
Datasheet (MGM240P)
Fritzing Part
Thing+ Comparison Guide
Qwiic Info Page
GitHub Hardware Repo
Caractéristiques
Capteur de CO2 à technologie NDIR : intégré à Sensirion SCD30
Multi-fonction : intègre un capteur de température et d'humidité sur le même module de capteur
Haute précision et grande exactitude de mesure : ± (30 ppm + 3%) entre 400 ppm et 10000 ppm
Stabilité supérieure : détection à double canal
Facile à utiliser pour vos projets : interface numérique I²C, facile à utiliser sur une platine d'essai, compatible avec Grove
Meilleur rapport performance/prix
Idées d'application
Purificateur d'air
Surveillance environnementale
Système de surveillance environnementale des plantes
Station météo Arduino
Libérez votre Mozart intérieur avec Piano HAT, un mini compagnon musical pour votre Raspberry Pi !
Piano HAT est inspiré du PiPiano de Zachary Igielman et réalisé avec sa bénédiction. Nous avons pris son fabuleux concept d'extension piano miniature pour le Raspberry Pi, l'avons rendu tactile et y avons ajouté des touches de notre fameux polissage Pimoroni.
Jouez de la musique en Python, contrôlez des synthétiseurs logiciels sur votre Pi et prenez les rênes des synthétiseurs matériels !
Caractéristiques
16 pads tactiles capacitifs (liez chacun à sa propre fonction Python !)
13 touches de piano (une octave complète)
Boutons d'octave haut/bas
Bouton de cycle d'instruments (idéal pour une utilisation avec des synthétiseurs)
16 LED blanches lumineuses (laissez-les s'allumer automatiquement ou prenez le contrôle avec Python)
2x puces de pilote tactile capacitif Microchip CAP1188
Utilisez-le pour contrôler des synthétiseurs logiciels ou matériels via MIDI
Compatible avec tous les modèles Raspberry Pi à connecteur 40 broches
Livré entièrement assemblé
Téléchargements
Bibliothèque Python
Schéma de broches
Raspberry Pi 5 fournit deux connecteurs MIPI à quatre voies, chacun pouvant prendre en charge une caméra ou un écran. Ces connecteurs utilisent le même format FPC « mini » à 22 voies au pas de 0,5 mm que le kit de développement de module de calcul et nécessitent des câbles adaptateurs pour se connecter aux connecteurs au format « standard » à 15 voies au pas de 1 mm du Raspbery Pi actuel. produits d'appareil photo et d'affichage. Ces câbles adaptateurs mini vers standard pour caméras et écrans (notez qu'un câble de caméra ne doit pas être utilisé avec un écran, et vice versa) sont disponibles en longueurs de 200 mm, 300 mm et 500 mm.
Ajoutez une connectivité GSM globale et un suivi GPS à votre projet avec un BerryGPS-GSM.
Il s'agit d'un module tout-en-un qui peut fournir à votre projet un suivi de localisation et des services GSM tels que des données, des textes et des SMS. Il se présente sous le même format qu'un Raspberry Pi Zero, ce qui le rend agréable et compact lorsqu'il est utilisé avec un Raspberry Pi Zero.
Les deux principaux composants qui rendent cette carte géniale sont :
Module GPS uBlox CAM-M8 (même GPS que celui trouvé sur BerryGPS-IMU V3 )
uBlox SARA-U201 GSM pour la connectivité GSM, qui a une couverture mondiale.
La collaboration de ces deux modules permet d'obtenir une position GPS en quelques secondes, à l'aide du GPS assisté. En règle générale, un module GPS peut prendre quelques minutes pour obtenir le Time To First Fix (TTFF), voire plus si vous êtes dans des zones bâties. En effet, l'Almanach doit être téléchargé à partir des satellites avant qu'une position GPS puisse être acquise et seule une petite partie de l'Almanach est envoyée dans chaque mise à jour GPS.
Le GPS assisté accélère considérablement ce processus en téléchargeant les éphémérides, l'almanach, l'heure précise et l'état des satellites sur le réseau, ce qui entraîne un TTTF plus rapide, en quelques secondes. Le fonctionnement du GPS sur un smartphone est très similaire.
BerryGPS-GSM a été conçu pour le Raspberry Pi Zero, mais il fonctionne avec toutes les versions du Raspberry Pi.
Nous avons créé un connecteur PCB USB vers USB à utiliser avec un Raspberry Pi Zero, conçu pour rendre votre projet plus compact.
Fiches techniques spécifiques au GPS
CAM-M8-FW3_DataSheet_(UBX-15031574)
CAM-M8-FW3_HardwareIntegrationManual_(UBX-15030063)
Fiches techniques spécifiques au GSM
Fiche technique SARA-U201 (UBX-13005287)
SARA-U201 SysIntegrationManual_(UBX-13000995)
u-blox CEL_ATCommands_(UBX-13002752)
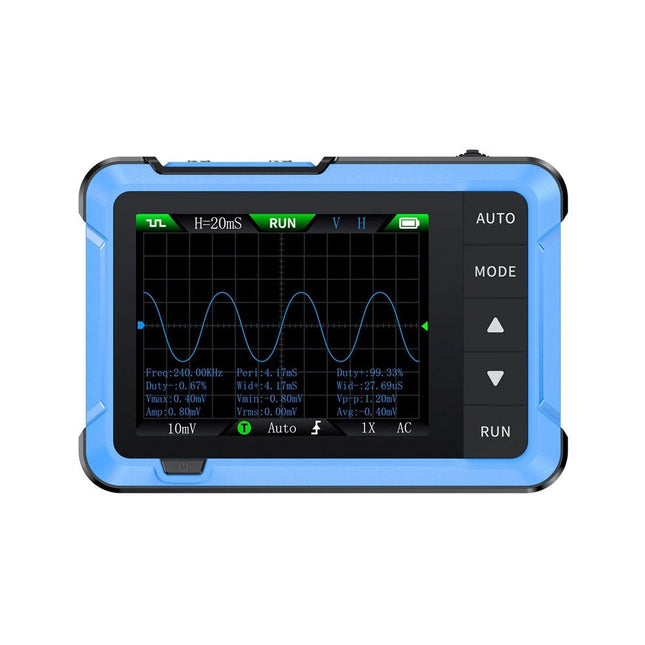
L'oscilloscope DSO510 a été conçu pour les tests de signaux complexes, la recherche et le développement. Idéal pour un usage professionnel et éducatif, il garantit des mesures précises en toute simplicité.
Avec un taux d'échantillonnage en temps réel de 48 MS/s et une bande passante de 10 MHz, il prend en charge les signaux analogiques et numériques. Ses modes de déclenchement complets (Single, Normal, Auto) et sa plage de tension de ±400 V offrent une précision fiable. Le mode AUTO en un clic simplifie l'affichage de la forme d'onde.
Un générateur de signal 50 KHz intégré ajoute de la polyvalence, tandis que l'écran LCD HD de 2,8 pouces et la batterie de 1000 mAh offrent des visuels clairs et jusqu'à 4 heures d'utilisation.
Caractéristiques
Oscilloscope : bande passante de 10 MHz, taux d'échantillonnage de 48 MS/s, plage de tension de ±400 V.
Générateur de signal : 50 KHz
Écran : TFT HD 2,8 pouces (320 x 240)
Interface : USB-C
Conception : entièrement assemblé, léger, idéal pour les tâches de maintenance.
Fonctions de déclenchement : modes unique, normal et automatique.
Prise en charge des signaux : gère les signaux analogiques périodiques et numériques non périodiques.
Mode AUTO en un clic : affiche instantanément les formes d'onde sans configuration complexe.
Batterie : batterie au lithium intégrée de 1000 mAh offrant jusqu'à 4 heures d'utilisation par charge.
Langues prises en charge : anglais, allemand, espagnol, portugais, russe, chinois, coréen et japonais.
Spécifications
Canal
1
Bande passante
10 MHz
Taux d'échantillonnage
48 Méch/s
Sensibilité verticale
10 mV/Div-20 V/Div
Plage de base de temps
50 ns/Div-20 s/Div
Valeurs de mesure
22 types
Mode de déclenchement
Auto/Normal/Single
Plage de tension
X1 : ±40 V (Vpp : 80 V)X10 : ±400 V (Vpp : 800 V)
Déclencher le bord
Rising/Falling
Couplage
AC/DC
Fréquence
0-50 KHz
Cycle de service
0-100% (ondes rectangulaires et en dents de scie)
Amplitude
0,1-3,0 V
Formes d'onde
Sinusoïde, rectangulaire, dent de scie, demi, plein, pas, anti-pas, montée exponentielle, chute exponentielle, signal CC, multi-tons, impulsion de puits, Lorentz.
Afficher
2,8 pouces (320 x 240 pixels)
Chargement USB
5 V/1 A
Capacité de la batterie au lithium
1000 mAh
Dimensions
99 x 68,3 x 19,5 mm
Poids
104 g
Inclus
1x FNIRSI DSO510 oscilloscope
1x Sonde d'oscilloscope P6100
1x Adaptateur
1x Sonde à pince crocodile
1x Câble de chargement USB
1x Lanière
1x Manual
Téléchargements
Manual
Firmware V1.0.4