Produits
-

Elektor Digital Elektor Mars/Avril 2025 (PDF) FR
Le téléchargement intégral de ce numéro est disponible pour nos membres GOLD et GREEN sur le site Elektor Magazine ! Pas encore membre ? Cliquez ici. L'architecture de processeur open-source RISC-V16 cartes et MCU à connaître un lecteur audio avec égaliseur basé sur un FPGAMixage audio numérique avec un Arduino MKR Vidor 4000 tête laser pour l’horloge de sable basé sur Raspberry Pi PicoDessiner avec la lumière participez au concours STM32 Edge AI système de contrôle environnemental multi-capteurs pour les plantesMesure sans fil de l'approvisionnement en eau et de la luminosité porte automatique contrôlée par l'IA et MaixduinoReconnaissance faciale avec une caméra l’électronique embarquée en 2024L’IA va redéfinir l’industrie Calcul en mémoire basé sur la charge chez EnCharge AI des opérations d'IA avec 10 fois moins d'énergie et des coûts divisés par 20 Une carte pour le développement et l’entraînement des modèles ML d’analyse des vibrations Elektor Mini-WheelieKit robot gyropode (robot autostabilisé) MCUViewerMCUViewer outil de débogage open source multiplateforme isolateur USB 2.0Isolation éléctrique pour les périphériques USB anticipation et actionApplication pratique de la maintenance prédictive SPoE – compatibilité électromagnétiquePaire unique avec Power-over-Ethernet à travers les yeux d'EMC rétro-techCréer un monde nouveau avec la télévision couleur surveillance ECGavec des modules Hexabitz et STM32CubeMonitor la bataille pour l’IA en périphérie HaLow atteint une distance Wifi record de 16 km à 900 MHz première puce embarquée CHERI RISC-V et programme d'accès anticipé la détection des incendies de forêt de troisième génération utilise des liaisons satellites sur le vifDélices et supplices du choix démarrer en électronique......Filtrage et contrôle de la tonalité Kit d'horloge quasi-analogiqueNouvelle version d'un classique d'Elektor une approche modulaire de test des capteursCarte de test de capteurs basée sur l'ESP32-S3 2025 : une odyssée de l'IAL'essor des modèles de fondation et leur impact sur l'accessibilité de l'IA Synthétiseur MIDI autonome Raspberry Pi (1)Préparation d'une plateforme pour des expériences d’IA en périphérie projet 2.0Corrections, mises à jour et courrier des lecteurs Le RISC-V AI, un processeur à tout faire : CPU, GPU, DSP, FPGA paroles de PDG : fraîcheur, silence et finesse programmation Dual-Core avec le Raspberry Pi PicoLe monde de la programmation parallèle
€ 10,95
-

Elektor Mars/Avril 2026 (FR)
Le téléchargement intégral de ce numéro est disponible pour nos membres GOLD et GREEN sur le site Elektor Magazine ! Pas encore membre ? Cliquez ici. programmation PIO sur le Raspberry Pi PicoNeuf instructions, de multiples possibilités l'IA en ligne de commandeDéveloppement, compilation et validation de projets embarqués depuis le terminal le Scrutiny DebuggerDéboguer, visualiser et tester du code C/C++ embarqué carte breakout Sigfox (1)Développement d’une BoB radio alimentation à faible bruit (2)Construction, assemblage et mise en œuvre pratique générateur de signaux simple basé sur le RP2040Signaux analogiques et numériques à la découverte du futur de la domotique avec Matter et l’IA EdgeLes dernières versions de Matter et l’essor de l’IA en périphérie de réseau (edge) donnent-ils enfin aux ingénieurs les outils nécessaires pour construire les maisons intelligentes et parfaitement intégrées promises aux utilisateurs ? capteurs de pression différentielleLa maintenance prédictive appliquée aux systèmes CVC la sécurité dès la conceptionPrincipes d’ingénierie pour limiter les défaillances la sécurité des systèmes embarqués n’est plus une option la CRA et la PQC redéfinissent les priorités de la sécurité embarquéePourquoi même les petites entreprises IoT et industrielles doivent prévoir une mise à niveau embedded world 2026Entretien avec Benedikt Weyerer, directeur d’embedded world prise en main du bus I3CUtilisation de matériel de ST et Microchip le projet BLEnkyPrototypage rapide d’applications Bluetooth Low Energy modulation de largeur d’impulsionDu thermostat tout ou rien à un signal analogique continu filtré audiotroniqueDes circuits audio agréables à l’écoute, à réaliser soi-même sur le vifLisez donc le manuel ! carte émetteur-récepteur audio ESP32 (4)Réglage des horloges et une option filaire 2026 : une odyssée de l’IAConséquences du vibe coding charge CC symétriqueCharge CC symétrique, statique ou dynamique comptage de visages avec MaixCAMUne méthode simple pour estimer la taille d’un public
€ 16,50
-

Elektor Digital Elektor Mars/Avril 2026 (PDF) FR
Le téléchargement intégral de ce numéro est disponible pour nos membres GOLD et GREEN sur le site Elektor Magazine ! Pas encore membre ? Cliquez ici. programmation PIO sur le Raspberry Pi PicoNeuf instructions, de multiples possibilités l'IA en ligne de commandeDéveloppement, compilation et validation de projets embarqués depuis le terminal le Scrutiny DebuggerDéboguer, visualiser et tester du code C/C++ embarqué carte breakout Sigfox (1)Développement d’une BoB radio alimentation à faible bruit (2)Construction, assemblage et mise en œuvre pratique générateur de signaux simple basé sur le RP2040Signaux analogiques et numériques à la découverte du futur de la domotique avec Matter et l’IA EdgeLes dernières versions de Matter et l’essor de l’IA en périphérie de réseau (edge) donnent-ils enfin aux ingénieurs les outils nécessaires pour construire les maisons intelligentes et parfaitement intégrées promises aux utilisateurs ? capteurs de pression différentielleLa maintenance prédictive appliquée aux systèmes CVC la sécurité dès la conceptionPrincipes d’ingénierie pour limiter les défaillances la sécurité des systèmes embarqués n’est plus une option la CRA et la PQC redéfinissent les priorités de la sécurité embarquéePourquoi même les petites entreprises IoT et industrielles doivent prévoir une mise à niveau embedded world 2026Entretien avec Benedikt Weyerer, directeur d’embedded world prise en main du bus I3CUtilisation de matériel de ST et Microchip le projet BLEnkyPrototypage rapide d’applications Bluetooth Low Energy modulation de largeur d’impulsionDu thermostat tout ou rien à un signal analogique continu filtré audiotroniqueDes circuits audio agréables à l’écoute, à réaliser soi-même sur le vifLisez donc le manuel ! carte émetteur-récepteur audio ESP32 (4)Réglage des horloges et une option filaire 2026 : une odyssée de l’IAConséquences du vibe coding charge CC symétriqueCharge CC symétrique, statique ou dynamique comptage de visages avec MaixCAMUne méthode simple pour estimer la taille d’un public
€ 10,95
-
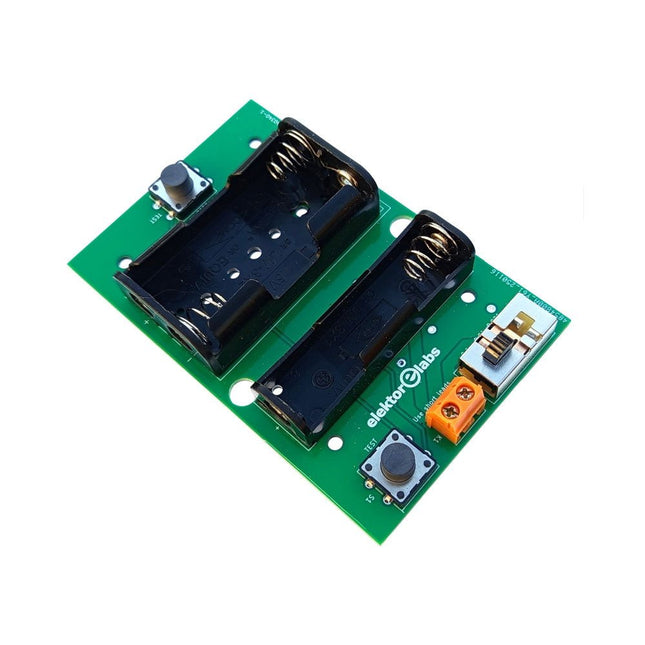
Elektor Labs Adaptateur milliohmmètre Elektor
L'adaptateur milliohmmètre Elektor utilise la précision d'un multimètre pour mesurer des valeurs de résistance très faibles. Il convertit une résistance en tension mesurable avec un multimètre standard. L'adaptateur milliohmmètre Elektor permet de mesurer des résistances inférieures à 1 mΩ grâce à la méthode 4 fils (Kelvin). Il est utile pour localiser les courts-circuits sur les circuits imprimés. L'adaptateur dispose de trois plages de mesure : 1 mΩ, 10 mΩ et 100 mΩ, sélectionnables via un interrupteur à glissière. Il intègre également des résistances d'étalonnage. L'adaptateur milliohmmètre Elektor est alimenté par trois piles AA de 1,5 V (non fournies). Spécifications Gammes de mesure 1 mΩ, 10 mΩ, 100 mΩ, 0,1% Alimentation 3x piles AA 1,5 V (non fournies) Dimensions 103 x 66 x 18 mm (compatible avec le boîtier de type Hammond 1593N, non fourni) Spécificité Résistances d'étalonnage intégrées Téléchargements Documentation
€ 34,95
Membres : € 31,46
-
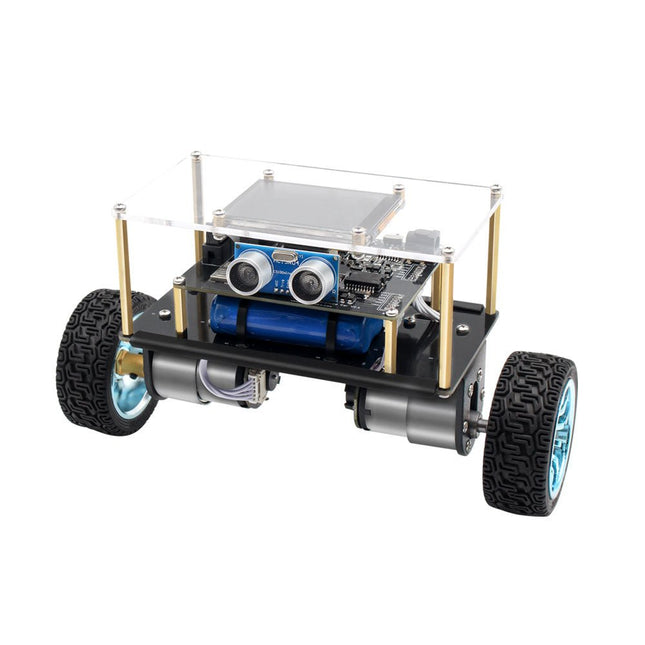
Elektor Labs Elektor Mini-Wheelie Robot auto-équilibrant
Robot à équilibrage sur deux roues compatible Arduino et alimenté par ESP32 L'Elektor Mini-Wheelie est une plateforme robotique expérimentale autonome et auto-équilibrée. Basé sur un microcontrôleur ESP32-S3, le robot auto-équilibré est entièrement programmable à l'aide de l'environnement Arduino et de bibliothèques open source. Ses capacités sans fil lui permettent d'être contrôlé à distance via Wi-Fi, Bluetooth ou ESP-NOW ou de communiquer avec un utilisateur ou même un autre robot. Un transducteur à ultrasons est disponible pour détecter les obstacles. Son écran couleur peut être utilisé pour afficher de jolies expressions faciales ou, pour les utilisateurs les plus terre-à-terre, des messages de débogage énigmatiques. Le robot est livré en kit complet avec des pièces à assembler soi-même. Tout est inclus, même un tournevis. Remarque : Le Mini-Wheelie est une plateforme de développement pédagogique destinée à l'apprentissage, à l'expérimentation et au développement de la robotique. Il n'est pas considéré comme un jouet pour enfants, et ses caractéristiques, sa documentation et le public auquel il s'adresse reflètent cet objectif. Le produit est destiné aux étudiants, aux éducateurs et aux développeurs qui souhaitent explorer la robotique, la programmation et l'intégration de matériel dans un cadre éducatif. Spécifications Microcontrôleur ESP32-S3 avec Wi-Fi et Bluetooth MPU6050 unité de mesure inertielle (IMU) à 6 axes Deux moteurs électriques 12 V à commande indépendante avec tachymètre Transducteur à ultrasons Écran couleur TFT 2,9 pouces (320 x 240) Emplacement pour carte MicroSD Moniteur de puissance de la batterie Batterie Li-Po rechargeable 3S (11,1 V/2200 mAh) Chargeur de batterie inclus Logiciel Open Source basé sur Arduino Dimensions (L x L x H) : 23 x 8 x 13 cm Inclus 1x Carte mère ESP32-S3 + module MPU6050 1x Carte LCD (2,9 pouces) 1x Capteur à ultrasons 1x Batterie (2200 mAh) 1x Chargeur de batterie 1x Kit de pneus moteur 1x Tableau de caisse 1x Tableau acrylique 1x Tournevis 1x Bande de protection 1x Câble flexible B (8 cm) 1x Câble flexible A (12 cm) 1x Câble flexible C 4x Colonnes A en cuivre (25 mm) 4x Colonnes B en cuivre (55 mm) 4x Colonnes C en cuivre (5 mm) 2x Colonnes en plastique et nylon 8x Vis A (10 mm) 24 Vis B (M3x5) 8x Noix 24x Rondelles métalliques 2x Attaches zippées 1x Carte MicroSD (32 Go) Téléchargements Documentation
-

Elektor Labs Elektor dé à lampes néon
Un dé rétro à l'âme néon Les dés à LED sont courants, mais leur lumière est froide. Ce dé électronique néon affiche sa valeur grâce à la lueur chaleureuse des néons. Il est idéal pour jouer lors des froides et sombres soirées d'hiver. Les points du dé sont des néons et le générateur de nombres aléatoires est équipé de six néons pour indiquer son fonctionnement. Même si le dé est équipé d'une alimentation 100 V intégrée, il est totalement sûr. Comme tous les produits Elektor Classic, le schéma du circuit est imprimé sur la face avant du dé, tandis qu'une explication du fonctionnement du circuit se trouve au dos. Le dé néon est livré sous forme de kit de pièces traversantes faciles à souder. L'alimentation est assurée par une pile 9 V (non fournie). Caractéristiques Lumière vintage chaleureuse Symboles du circuit Elektor Heritage Essayé et testé par Elektor Labs Projet éducatif et geek Pièces traversantes uniquement Inclus Carte de Circuit Imprimé Tous les Composants Socle en Bois Requis Pile 9 V Liste des composants Résistances (THT, 150 V, 0.25 W) R1, R2, R3, R4, R5, R6, R14 = 1 MΩ R7, R8, R9, R10, R11, R12 = 18 kΩ R13, R15, R16, R17, R18, R21, R23, R24, R25, R26, R28, R30, R33 = 100 kΩ R32, R34 = 1.2 kΩ R19, R20, R22, R27, R29 = 4.7 kΩ R31 = 1 Ω Condensateurs C1, C2, C3, C4, C5, C6 = 470 nF, 50 V, 5 mm pitch C7, C9, C11, C12 = 1 µF, 16 V, 2 mm pitch C8 = 470 pF, 50 V, 5 mm pitch C10 = 1 µF, 250 V, 2.5 mm pitch Inductances L1 = 470 µH Semi-conducteurs D1, D2, D3, D4, D5, D6, D7 = 1N4148 D8 = STPS1150 IC1 = NE555 IC2 = 74HC374 IC3 = MC34063 IC4 = 78L05 T1, T2, T3, T4, T5 = MPSA42 T6 = STQ2LN60K3-AP Divers K1 = Support pile PP3 9 V NE1, NE2, NE3, NE4, NE5, NE6, NE7, NE8, NE9, NE10, NE11, NE12, NE13 = néon S2 = interrupteur à glissière miniature S1 = Bouton-poussoir (12 x 12 mm)
-

Elektor Digital Elektor novembre/décembre 2020 (PDF)
NOUVEAU LCR-MÈTRE 50 HZ - 2 MHZpont de mesure d'impédance automatique pour mesurer la résistance, la capacité et l'inductance des composants ayant une impédance de 10 mΩ à 100 MΩCONNECTEZ VOTRE SONNETTE À L'INTERNET DES OBJETSavec Home Assistant et ESPHomeCOMMENT BIEN GÉRER MES BATTERIES ?Qui veut aller loin ménage son lithiumDÉMARRER EN ÉLECTRONIQUE (5)…est moins difficile qu'on ne l'imagine !ELLES SONT PETITES, MAIS FONT DE GRANDES CHOSESLes pépites d'ElektorFRITZING◦: GRAPHISME D'IMPLANTATION SUR PLAQUES D'ESSAISCONCEPTION DE FILTRES ANALOGIQUES (2)Filtres actifsDIS-MOI COMMENT TU RANGES TON LABO...Visite guidée dans le saint des saintsBUREAU D'ÉTUDES - ZONE DD comme développement, débrouille et dur-à-cuire Trucs et astuces, bonnes pratiques et autres informations utilesBANC D'ESSAI : OSCILLO À 4 VOIES RIGOL DS1054ZBOUGIE DE NOËL ÉLECTRONIQUESoufflez-la comme une vraie !GÉNÉRATEUR SINUSOÏDAL ACCORDABLE À TUBESLe retour du rétroBANC D'ESSAI : GÉNÉRATEUR DDS RIGOL DG4162GREFFONS ET MODULES DE KICADSONDE DE COURANT DIFFÉRENTIELLE POUR OSCILLO – 2.0Mesurer les courants avec l'oscilloscopeRÉTRONIQUE : LA BOUCLE D'INTERFACE HEWLETT-PACKARDConnecter le monde (en 1981) !APPRENTISSAGE AUTOMATIQUE : UN BEL AVENIREntretien avec Daniel SitunayakeAPPLICATIONS MOBILES POUR ANDROID ET IOSà partir d'un moule uniqueSUR LE VIFProfessions en déficit de main d'oeuvre5G : QUI FAÇONNE QUI, LES INFRASTRUCTURES OU LA SOCIÉTÉ ?La question n'est pas anodine, les conséquences non plusMULTITÂCHE EN PRATIQUE AVEC L'ESP32 (5)Notification d'événements de tâchesOSCILLATEUR HP 10811Un drôle de composant drôlement précisBALISE GPS LORAMatériel et logiciel libres et ouvertsJE PROGRAMME AVEC DES AUTOMATES FINISen assembleur et en C sur des PIC à 8 bitsHEXADOCU
€ 10,95
-

Elektor Digital Elektor Novembre/Décembre 2021 (PDF)
TRAITEMENT D'IMAGES AVEC LE KIT JETSON NANO DE NVIDIA2e partie : reconnaissance d'imagesELEKTOR JUMPSTARTER – DU NOUVEAUCampagnes à venirTRACEUR GPS À CODE SOURCE OUVERTTraccar cartographie les déplacements de véhicules, sans recours à un serveur tiers du nuageTESTEUR MULTIFONCTION LCR-T7 DE JOY-ITTest de semi-conducteurs passifs, discrets et de télécommandes IRSYNTHÉTISEUR DE BRUITDu bruit à la musique avec le PRBSynth1DÉMARRER EN ÉLECTRONIQUE…Easier than Imagined! ... Continuing with the CoilVOYAGE DANS LES RÉSEAUX NEURONAUX (2E PARTIE)Les neurones logiquesPROBLÈMES DE SÉCURITÉ ? COMBATTEZ LE FEU PAR LE FEU !Extension à mémoire analogique, protégée par ampoule de flash, pour la boîte à témoin d'effractionKIT DU LCR-MÈTRE 2 MHZ D'ELEKTORBALISES BLUETOOTH : LA PRATIQUEGéolocalisation intra murosC PROGRAMMING ON RASPBERRY PIExtrait : communiquer par Wi-FiTEST DE PRÉCONFORMITÉ CEM POUR UN PROJET ALIMENTÉ EN COURANT CONTINUPartie 2 : le matériel et son utilisationPROPELLER 2 DE PARALLAX (5)La fonction de « broche intelligente »MODBUS SANS FIL (PARTIE 1)Matériel et programmationJUNIOR COMPUTEREn forme après 40 ans de sommeilCONSTRUIRE SON PROPRE ÉTALONNEUR DE HAUTE PRÉCISION−10 V à +10 V, 0 à 40 mA, 0,001 %ARDUINO NANO RP2040 CONNECT EN DÉTAILRaspberry Pi RP2040 + Wi-Fi + BluetoothLE CORPS PHYSIQUE DE L'INTELLIGENCE ARTIFICIELLEPROJET 2.0corrections, mises à jour et courriers des lecteursCRÉATION D'INTERFACES GRAPHIQUES EN PYTHON AVEC GUIZEROInstallez la bibliothèque Python guizero et créez vos propres interfaces graphiques.KIT DE MESURE DU CO2 POUR SALLE DE CLASSEMontage à base d'ESP8266, conçu par l'Université des Sciences Appliquées d'Aix-la-ChapelleMK484, RADIORÉTRO PO/GO...Toujours le plaisir de construire !60 ANS D'ELEKTORQue la lumière soit !HEXADOKUThe Original Elektorized Sudoku
€ 10,95
-

Elektor Digital Elektor Novembre/Décembre 2022 (PDF)
Le téléchargement intégral de ce numéro est disponible pour nos membres GOLD et GREEN sur le site Elektor Magazine !Pas encore membre ? Cliquez ici.Le haut de gamme au cœur du labo ElektorAmplificateur haut de gamme Fortissimo-100Étage de sortie audio entièrement symétrique avec 100/190 WVérification de la fréquence des quartz et des circuits accordésAstuces, bonnes pratiques et autres informations utilestrucs et astuces pour circuits impriméssouder - et alors ?un regard approfondi sur la technologie de soudage modernecommande de porte de garage par Bluetooth à réponse rapideOuvrez votre porte avec votre smartphonecontrôleur de diode idéalecircuits à diodes à faible dissipation de puissanceguirlandes de LED avec ESP32 et FreeRTOSclignotantes et scintillantesdémarrer en électronique...avec plaisir, on continue avec les Zenerrécepteur FM/DAB+le meilleur des deux mondessur le vifElectronica Obscuraprocédé sans fil de débogage de micrologicielsTampon circulaire et serveur web sur l'ESP32Le COVID-19 a-t-il donné un coup de fouet à l'innovation en ingénierie ?Composants et solutions innovants de 2022Ersa i-CON TRACE – la station de soudage connectée pour professionnelsInfographiquesqu'allons-nous faire de toute cette informatique ?Comment piloter l'afficheur E-Paper d'Ynvisibleinnovation de tous les instants chez InnoFaithentretien avec Walter Arkesteijnautomatisation industriellerétrofit IdO facile et évolutifQt pour le Raspberry Piguide pas à pas pour la configuration du framework d'interface graphique utilisateurLes connecteurs linéaires ultra-plats facilitent la gestion de données multi-signauxintelligents - innovants - rentablesles FPGA GateMate conçus et fabriqués en Allemagnedes outils pour soutenir le développement de capteurs à faible coûtfusible réarmable CTPdrôle de composant, la sérieSortie analogique isolée pour Arduino Unovisite à domicile… Découvre le Thérémineelectronica fast forward 2022 — une initiative d'Elektoréquipe et calendrierradiogoniométrieretrouver les capteurs météo sans fil égarésestimer le bruit interne d'un circuit intégréméthode simpleQuestions d'éthiqueInitié par le WEEFÉthique et profit, un mariage de raisonEntretien avec le professeur Stefan Heinemannl'index WEEF 2023logiciel de calcul de filtresOutils de conception de filtres analogiquesÉteins-moi cette télé !avec TV-B-GoneMesure de la qualité de l'air avec le RP2040elekterminalInitiation à Python 3extrait du chapitre : bibliothèque Wand et traitement numérique des imagesSOLARPUNKun avenir prometteurHexadoku
€ 10,95
-

Elektor Digital Elektor novembre/décembre 2023 (PDF)
Le téléchargement intégral de ce numéro est disponible pour nos membres GOLD et GREEN sur le site Elektor Magazine !Pas encore membre ? Cliquez ici.le Raspberry Pi 5une grande amélioration par rapport à son prédécesseurl'IA dans les laboratoires d'électroniqueBard de Google et Flux Copilot mis en testGénérateur de formes d'ondes Arduino NanoNano + Code = Générateur de fonctionsguirlande de Noël solairedétecteur de clé USB KillerMieux vaut prévenir que guérirun boîtier simple créé par fraiseuse à commande numérique (CNC)avec Autodesk Fusion 360 en utilisation personnelleproduction de cartes à faible quantitéavec et sans assemblagesimulation IdO simplifiée avec Wokwile développeur Uri Shaked parle de design, de logiciels et d'autres choses encoreguide de programmation Bare-Metal (3)en-têtes CMSIS, tests automatiques et serveur webLoRa, un couteau suisse (1)le matériel et le logicielconception et construction de microphones MEMSoutils à tester avant de souderoutils de simulation et de modélisation 3D gratuitsnouveaux outils de Microchip!PICkit 5 et MPLAB ICD 5 sont disponibles maintenant !prototypage rapide d'électronique souple et extensiblecomment la Voltera NOVA accélère l'innovation dans les systèmes électroniques portablesisolation galvaniqueutilisation d'optocouplers à phototransistorla solution complexe ou la solution Anybus ?un Ethernet industriel embarqué réalisé en deux jours plutôt qu'en plusieurs moisvotre liste de contrôle DFM essentiellefilaments pour l'impression 3Dtypes, caractéristiques et utilisation dans le prototypagespécialistes pour une analyse efficace des signaux des bandes ELF à EHFles derniers analyseurs de spectre en temps réel de la série SPECTRAN® V6 d'Aaroniadéfis de l'analyse DFM pour les circuits flexibles et flexibles-rigidesdéfinir une ligne SMTinfographie : prototypage et productionrévolutionner le secteur de l'industriel'essor des robots mobiles autonomes (AMR)prêt à relever encore plus de défisRohde & Schwarz étoffe sa famille d'oscilloscopes nouvelle génération avec le modèle 8 voies de la gamme R&S MXO 5démarrer en électronique…Amplifying Differencesmini plaque de refusion'pour l'assemblage ou la réparation de petits circuits CMSne commencez pas avec un prototype, mais plutôt avec un « pretotype » !vérifiez qu'il existe un marché pour votre produit avant d'allumer votre fer à souder2023 : l'Odyssée de l'IAassistance à la conception d'un projet matérielBruxelles et l'innovationsoutien aux technologies avancées
€ 10,95
-

Elektor Digital Elektor Novembre/Décembre 2024 (PDF)
Le téléchargement intégral de ce numéro est disponible pour nos membres GOLD et GREEN sur le site Elektor Magazine ! Pas encore membre ? Cliquez ici. Prototypage, production et composants ! carte processeur Audio DSP FXpartie 1 : caractéristiques et conception 50 ans d'Elektor en anglais KiCad 8nouvelles et dernières caractéristiques Elektor @ electronica 2024electronica Fast Forward 2024, des experts sur scène, des forums d'influenceurs, des talk-shows Elektor Lab en direct, et plus encore kit MultiCalculator d'ElektorUn kit de calculatrice basé sur Arduino pour l'électronique systèmes GNSS RTK à faible coûtavec un degré de précision de l'ordre du centimètre routage des Circuits Imprimés et sécuritéConseils pour une conception sure et fiable de vos cartes électroniques testeur d'ampli-oppour les applications audio et autres mise à jour du projet #4 : compteur d'énergie ESP32surveiller l'énergie avec MQTT analyseur de spectre temps-réel à technologie guide d’onde et PC à interfaces multiplesAaronia introduit une nouvelle ligne de produit et présente ses premiers prototypes au salon Electronica de Munich inductances SMTbobines et ferrites – un choix simplifié utilisation d’un blindage EMI pour assurer la conformité à la compatibilité électromagnétique l'outil ultime pour tous les passionnés d’électroniqueDébloquez des possibilités infinies avec Red Pitaya et plus de 1000 Click Boards™ HDI au milieuUn nouveau service PCB-pooling rentable pour des petits BGA défis de l'analyse DFM pour les circuits flexibles et flexibles-rigides outils open-sourcesimulateur d'antennes, gestion des composants, calculatrice, et bien plus Infographie : prototypage et production sur le vifmicrotechnophobie : c’est grave, docteur ? arbre de Noël 3Dcircuit imprimé 3D avec un microcontrôleur 32 bits peu coûteux démarrer en électronique......on continue avec l'ampli-op ! nœud de capteurs autonome (mise à jour du projet #1)Reducing Idle Power Consumption with External RTC and Power Switch 2024 : l'odyssée de l'IAUn regard sur l'avenir afficheurs LED avec le MAX7219Une méthode pratique pour une excellente puce projet 2.0Corrections, mises à jour et courrier des lecteurs gants vibro-tactilesune avancée pour les patients de Parkinson
€ 10,95
-

Elektor Novembre/Décembre 2025 (FR)
Le téléchargement intégral de ce numéro est disponible pour nos membres GOLD et GREEN sur le site Elektor Magazine ! Pas encore membre ? Cliquez ici. Relio v1.0 – détection de présence et contrôle à distanceUn contrôleur intelligent pour appareils électriques compatible Matter concevoir de meilleurs circuits imprimésUn guide pratique pour les professionnels et les makers KiCad 9Nouvelles fonctionnalités et mises à jour picoampèremètre de précision (1)Traceur de courbes jusqu’à la gamme des pA ! étoile de Noël 2025Fabriquer votre étoile testeur de continuité 100 mV l’innovation électronique en EuropeLes entreprises à suivre de près productronica 2025 : quoi de neuf dans le développement et la production électroniques l’automatisation face aux défis de la relocalisation, des tarifs et de la pénurie de main-d’œuvre Au-delà de la résilienceLa circularité dans l’électronique composants passifsBobines à faibles pertes pour convertisseurs CC/CC à haut rendement comment les machines de bureau démocratisent la production de circuits imprimés démarrer en électronique......Alimentation sur le vifButton Fever soudage : quoi de neuf en 2025 ?Conseils pratiques en direct depuis l’établi SimulIDEUn outil tout-en-un pour le prototypage de circuits 2025 : une odyssée de l’IADe l’autocomplétion à un véritable collègue Wordy Christmas TreeUn sapin électronique polyglotte pour les fêtes projet 2.0Corrections, mises à jour et courrier des lecteurs Analog Pipeline DistortionUn effet audio original pour guitares et autres instruments carte émetteur-récepteur audio ESP32 (3)Transmission stéréo et double radio
€ 15,50
-

Elektor Digital Elektor Novembre/Décembre 2025 (PDF) FR
Le téléchargement intégral de ce numéro est disponible pour nos membres GOLD et GREEN sur le site Elektor Magazine ! Pas encore membre ? Cliquez ici. Relio v1.0 – détection de présence et contrôle à distanceUn contrôleur intelligent pour appareils électriques compatible Matter concevoir de meilleurs circuits imprimésUn guide pratique pour les professionnels et les makers KiCad 9Nouvelles fonctionnalités et mises à jour picoampèremètre de précision (1)Traceur de courbes jusqu’à la gamme des pA ! étoile de Noël 2025Fabriquer votre étoile testeur de continuité 100 mV l’innovation électronique en EuropeLes entreprises à suivre de près productronica 2025 : quoi de neuf dans le développement et la production électroniques l’automatisation face aux défis de la relocalisation, des tarifs et de la pénurie de main-d’œuvre Au-delà de la résilienceLa circularité dans l’électronique composants passifsBobines à faibles pertes pour convertisseurs CC/CC à haut rendement comment les machines de bureau démocratisent la production de circuits imprimés démarrer en électronique......Alimentation sur le vifButton Fever soudage : quoi de neuf en 2025 ?Conseils pratiques en direct depuis l’établi SimulIDEUn outil tout-en-un pour le prototypage de circuits 2025 : une odyssée de l’IADe l’autocomplétion à un véritable collègue Wordy Christmas TreeUn sapin électronique polyglotte pour les fêtes projet 2.0Corrections, mises à jour et courrier des lecteurs Analog Pipeline DistortionUn effet audio original pour guitares et autres instruments carte émetteur-récepteur audio ESP32 (3)Transmission stéréo et double radio
€ 10,95
-

Elektor Labs Bandit Manchot Elektor
Tirez le Levier pour le Score Maximum ! Ce Classique de Circuit Elektor de 1984 présente une application ludique des circuits logiques de la série CMOS 400x en combinaison avec des LEDs, une combinaison très populaire à l'époque. Le projet imite une machine à sous à chiffres tournants. Le Jeu Pour jouer, convenez d'abord du nombre de manches. Le Joueur 1 actionne le levier de l'interrupteur aussi longtemps qu'il le souhaite et le relâche. Les LEDs affichent ensuite le score qui est la somme des chiffres 50-20-10-5 allumés. Si la LED Jouer Encore ! s'allume, le Joueur 1 a une autre manche 'gratuite'. Sinon, c'est au tour du Joueur 2. Les joueurs tiennent compte de leurs scores, et le score le plus élevé l'emporte. Caractéristiques LEDs Indiquent le Score Plusieurs Joueurs et Jouer Encore ! Symboles de Circuit Patrimoine d'Elektor Testé et Approuvé par les Laboratoires Elektor Projet Éducatif et Geek Pièces Montage Traditionnel Seulement Inclus Carte de Circuit Imprimé Tous les Composants Socle en Bois Liste des Composants Résistances (5%, 250 mW) R1,R2,R3,R4 = 100kΩ R5,R6,R7,R8,R9,R10 = 1kΩ Condensateurs C1 = 4.7nF, 10%, 50V, 5mm C2 = 4.7μF, 10%, 63V, axial C3,C4 = 100nF, 10 %, 50V, céramique X7R, 5mm Semi-conducteurs LED1-LED6 = rouge, 5mm (T1 3/4) IC1 = 74HC4024 IC2 = 74HC132 Divers S1 = interrupteur, bascule, levier de 21mm, SPDT, momentané S2 = interrupteur, tactile, 24V, 50mA, 6x6mm S3 = interrupteur, glissière, SPDT IC1,IC2 = support de circuit intégré, DIP14 BT1 = pince de maintien de batterie CR2032 montée sur circuit imprimé Socle de Bureau PCB 230098-1 Non inclus : BT1 = pile bouton CR2032
€ 39,95€ 15,98
Meilleur prix
-
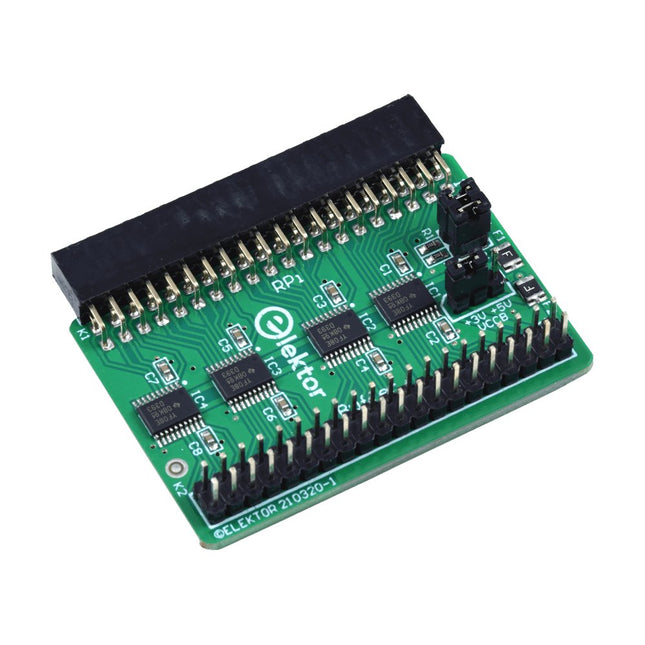
Elektor Labs Carte tampon pour Raspberry Pi d'Elektor
Lorsque vous expérimentez régulièrement avec le Raspberry Pi et que vous connectez une variété de matériel externe au port GPIO via le connecteur, il se peut que vous ayez causé des dommages par le passé. La carte tampon Raspberry Pi d'Elektor est là pour éviter cela ! La carte est compatible avec les Raspberry Pi Zero, Zero 2 (W), 3, 4, 5, 400 et 500. Les 26 GPIO sont protégées par des convertisseurs de tension bidirectionnels afin de protéger le Raspberry Pi lors de l'expérimentation de nouveaux circuits. Le circuit imprimé est destiné à être inséré à l'arrière du Raspberry Pi 400/500. Le connecteur à connecter au Raspberry Pi est un réceptacle 40 voies à angle droit (2x20). La platine est seulement un peu plus large. Un câble plat à 40 voies avec des connecteurs 2x20 appropriés peut être connecté au connecteur de sortie du tampon pour expérimenter avec par exemple un circuit sur une plaque d’expérimentation ou sur une platine. Le circuit utilise 4x circuits intégrés TXS0108E de Texas Instruments. Le circuit imprimé peut également être monté sur un Raspberry Pi. Téléchargements Schematics Layout
€ 34,95€ 29,95
Meilleur prix
-

Elektor Bundles Elektor Raspberry Pi Pico Advanced Kit (offre groupée)
Offre groupée complète de matériel et de livres pour le microcontrôleur RP2040 avec plus de 80 projets Débloquez le potentiel de la technologie de contrôleur moderne avec le Raspberry Pi Pico dans cette offre groupée. Parfait pour les utilisateurs débutants et expérimentés, ce guide facile à suivre vous emmène des bases de l'électronique aux complexités du traitement du signal numérique. Avec le Raspberry Pi Pico, le kit matériel dédié et la programmation MicroPython, vous apprendrez les principes clés de la conception de circuits, de la collecte de données et du traitement. Mettez en pratique plus de 80 projets, comme un chronomètre avec écran OLED, un télémètre laser et un ventilateur servocommandé. Ces projets sont conçus pour vous aider à appliquer ce que vous avez appris dans des scénarios réels. Le livre couvre également des sujets avancés tels que la technologie RFID sans fil, la détection d'objets et l'intégration de capteurs pour la robotique. Que vous cherchiez à développer vos compétences en électronique ou à vous plonger plus profondément dans les systèmes embarqués, cet ensemble est la ressource idéale pour vous aider à explorer tout le potentiel du Raspberry Pi Pico. Contenu de l'offre groupée 1x Livre de projet (273 pages) 1x Raspberry Pi Pico H 1x Kit de voiture intelligente Composants électroniques 2x Planches à pain sans soudure (400 trous) 1x Planche à pain sans soudure (170 trous) 5x LED colorées de 5 mm (verte, rouge, bleue, jaune et blanche) 1x Émetteur laser 1x Buzzer passif 1x Câble micro-USB (30 cm) 1x 65 fils de liaison 1x Câble Dupont mâle vers femelle de 20 cm 1x Étui transparent 1x Aimant (diamètre : 8 mm, épaisseur : 5 mm) 1x Potentiomètre rotatif 10x Résistances de 2 KΩ 2x Piliers en cuivre M2,5x30 mm 10x Vis à tête cylindrique Phillips 10x Écrous hexagonaux M2,5 en nickel 1x Tournevis double usage de 2 pouces Modules 1x Module RVB 1x Servomoteur 9G 1x Module joystick XY à deux axes 1x Module RFID RC522 1x Module d'affichage LED numérique 4 bits 1x Module d'affichage des feux de circulation 1x Module d'encodeur rotatif 1x Module d'affichage LCD 1602 (bleu) 1x Module de photorésistance 1x Moteur à courant continu avec fil Dupont mâle 1x Pale de ventilateur 1x Module Gouttes de Pluie 1x Module OLED 1x Clavier à interrupteur à membrane 1x Mini module à ressort magnétique 1x Télécommande infrarouge 1x Module récepteur infrarouge 1x Carte pilote de moteur pas à pas CC 1x Bouton Capteurs 1x Capteur de vibrations 1x Capteur d'humidité du sol 1x Capteur de son 1x Mini capteur de mouvement PIR 1x Capteur de température et d'humidité 1x Capteur de flamme 2x Capteurs de collision 2x Capteurs de suivi 1x Capteur à ultrasons
€ 99,95€ 79,95
Meilleur prix
-

Elektor Labs Horloge de sable Elektor pour Raspberry Pi Pico
Accroche-regard basé sur Raspberry Pi Une horloge à sable standard ne fait qu'indiquer le temps qui passe. En revanche, cette horloge à sable contrôlée par le Raspberry Pi Pico indique l'heure exacte en 'gravant' les quatre chiffres de l'heure et des minutes dans la couche de sable. Après un temps réglable, le sable est aplati par deux moteurs vibrants et tout recommence. Au cœur de l'horloge de sable se trouvent deux servomoteurs qui entraînent un stylo dans un mécanisme de pantographe. Un troisième servomoteur soulève le stylo de haut en bas. Le bac à sable est équipé de deux moteurs vibrants qui aplatissent le sable. La partie électronique de l'horloge des sables se compose d'un Raspberry Pi Pico et d'une carte RTC/driver avec une horloge en temps réel, ainsi que des circuits de commande pour les servomoteurs. Un manuel de construction détaillé peut être téléchargé. Caractéristiques Dimensions: 135 x 110 x 80 mm Temps de construction : environ. 1,5 à 2 heures Inclus 3x Feuilles acryliques prédécoupées avec toutes les pièces mécaniques 3x Mini servomoteurs 2x moteurs de vibration 1x Raspberry Pi Pico 1x Carte RTC/pilote avec les pièces assemblées Ecrous, boulons, entretoises et fils pour l'assemblage Sable blanc à grains fins
€ 49,95€ 39,95
Meilleur prix
-
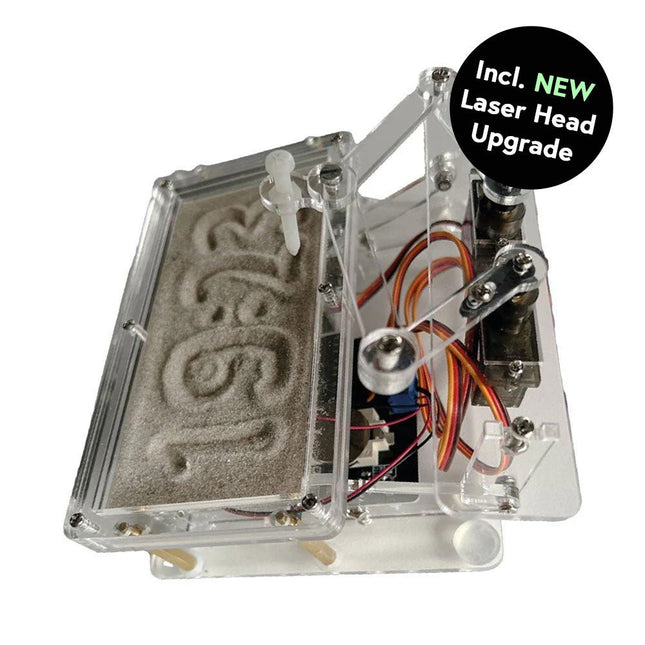
Elektor Labs Horloge de sable Elektor pour Raspberry Pi Pico (avec upgrade tête laser)
Cette offre groupée contient le populaire horloge de sable Elektor pour Raspberry Pi Pico et la nouvelle upgrade tête laser Elektor, offrant encore plus d'options d'affichage de l'heure. Non seulement vous pouvez « graver » l'heure actuelle dans le sable, mais vous pouvez désormais également l'écrire sur une feuille phosphorescente ou créer des dessins verts. Contenu de l'offre groupée Horloge de sable Elektor pour Raspberry Pi Pico (prix normal : 50 €) Upgrade tête laser Elektor pour horloge de sable (prix normal : 35 €) Horloge de sable Elektor pour Raspberry Pi Pico (Accroche-regard basé sur le Raspberry Pi) Une horloge à sable standard ne fait qu'indiquer le temps qui passe. En revanche, cette horloge à sable contrôlée par le Raspberry Pi Pico indique l'heure exacte en 'gravant' les quatre chiffres de l'heure et des minutes dans la couche de sable. Après un temps réglable, le sable est aplati par deux moteurs vibrants et tout recommence. Au cœur de l'horloge de sable se trouvent deux servomoteurs qui entraînent un stylo dans un mécanisme de pantographe. Un troisième servomoteur soulève le stylo de haut en bas. Le bac à sable est équipé de deux moteurs vibrants qui aplatissent le sable. La partie électronique de l'horloge des sables se compose d'un Raspberry Pi Pico et d'une carte RTC/driver avec une horloge en temps réel, ainsi que des circuits de commande pour les servomoteurs. Un manuel de construction détaillé peut être téléchargé. Caractéristiques Dimensions: 135 x 110 x 80 mm Temps de construction : environ. 1,5 à 2 heures Inclus 3x Feuilles acryliques prédécoupées avec toutes les pièces mécaniques 3x Mini servomoteurs 2x moteurs de vibration 1x Raspberry Pi Pico 1x Carte RTC/pilote avec les pièces assemblées Ecrous, boulons, entretoises et fils pour l'assemblage Sable blanc à grains fins Upgrade tête laser Elektor pour horloge de sablee La nouvelle tête laser Elektor transforme l'horloge de sable dans une horloge qui écrit l'heure sur un film qui brille dans le noir au lieu de sable. En plus d’afficher l’heure, il peut également être utilisé pour créer des dessins éphémères. Le pointeur laser de 5 mW, avec une longueur d'onde de 405 nm, produit des dessins vert vif sur le film qui brille dans le noir. Pour de meilleurs résultats, utilisez le kit dans une pièce faiblement éclairée. Attention : ne regardez jamais directement dans le faisceau laser ! Le kit comprend tous les composants nécessaires, mais la soudure de trois fils est nécessaire. Remarque : Ce kit est également compatible avec l'horloge de sable d'origine basée sur Arduino de 2017. Pour plus de détails, voir Elektor 1-2/2017 et Elektor 1-2/2018.
€ 84,95€ 69,95
Meilleur prix
-
Elektor Digital Elektor Select: Embedded & AI (PDF)
This collection features the best of Elektor Magazine's articles on embedded systems and artificial intelligence. From hands-on programming guides to innovative AI experiments, these pieces offer valuable insights and practical knowledge for engineers, developers, and enthusiasts exploring the evolving intersection of hardware design, software innovation, and intelligent technology. Contents Programming PICs from the Ground UpAssembler routine to output a sine wave Object-Oriented ProgrammingA Short Primer Using C++ Programming an FPGA Tracking Down Microcontroller Buffer Overflows with 0xDEADBEEF Too Quick to Code and Too Slow to Test? Understanding the Neurons in Neural NetworksEmbedded Neurons MAUI Programming for PC, Tablet, and SmartphoneThe New Framework in Theory and Practice USB Killer DetectorBetter Safe Than Sorry Understanding the Neurons in Neural NetworksArtificial Neurons A Bare-Metal Programming Guide Part 1: For STM32 and Other Controllers Part 2: Accurate Timing, the UART, and Debugging Part 3: CMSIS Headers, Automatic Testing, and a Web Server Introduction to TinyMLBig Is Not Always Better Microprocessors for Embedded SystemsPeculiar Parts, the Series FPGAs for BeginnersThe Path From MCU to FPGA Programming AI in Electronics DevelopmentAn Update After Only One Year AI in the Electronics LabGoogle Bard and Flux Copilot Put to the Test ESP32 and ChatGPTOn the Way to a Self-Programming System… Audio DSP FX Processor Board Part 1: Features and Design Part 2: Creating Applications Rust + EmbeddedA Development Power Duo A Smart Object CounterImage Recognition Made Easy with Edge Impulse Universal Garden LoggerA Step Towards AI Gardening A VHDL ClockMade with ChatGPT TensorFlow Lite on Small MicrocontrollersA (Very) Beginner’s Point of View Mosquito DetectionUsing Open Datasets and Arduino Nicla Vision Artificial Intelligence Timeline Intro to AI AlgorithmsPrompt: Which Algorithms Implement Each AI Tool? Bringing AI to the Edgewith ESP32-P4 The Growing Role of Edge AIA Trend Shaping the Future
€ 9,95
Membres : € 8,96
-

Elektor Digital Elektor septembre/octobre 2020 (PDF)
INTERFACE AUDIO USB-S/PDIFsortie audio numérique pour ordinateur, ordinateur portable, tablette etc.MULTITÂCHE EN PRATIQUE AVEC L'ESP32 (4)Sémaphores binairesCAPTEUR DE TEMPÉRATURE SANS FIL POUR LE THERMOMÈTRE À BARGRAPHE NIXIESolution polyvalente avec astuce de conceptionMULTITÂCHE AVEC RASPBERRY PISavoir-faire : commande de feux de circulationMINUTERIE POUR AMPLI DE CASQUESTATION MÉTÉO EN RÉSEAU OUVERT V.22ème partie : LogicielLA DOMOTIQUE, C'EST FACILE AVEC…ESPHome, Home Assistant et MySensorsLE TUBE CATHODIQUE DE STOCKAGEDrôle de composantINTELLIGENCE ARTIFICIELLE POUR DÉBUTANTS (3)Créez votre propre réseau de neuronesPROGRAMMER LES PIC – À PETITS PASproduire des sinus en assembleurBIDOUILLER UNE LAMPE IKEAAméliorer une lampe IKEA bon marché avec des LED NeoPixel et une interface WLANN'ABANDONNEZ PLUS VOS PROJETS, GÉREZ-LES AVEC RIGUEUR ET PLAISIRGestion du temps disponible et conception en spiraleDÉMARRER EN ÉLECTRONIQUE (4)…est moins difficile qu'on ne l'imagine !OHM SUITE OHMmachine de phonogravure faite maison8 BITS ET AU-DELÀEntretien avec Tam HannaRETOUR DES PETITS CIRCUITSuit de ideeënbus van ElektorBANC D'ESSAI : MULTIMÈTRE OWON OW18E AVEC BLUETOOTHÉLECTRONIQUE INTERACTIVECorrections & mises à jour || Questions & réponsesEXPÉRIENCE VÉCUESoudage sans plomb et zèle réglementaire de l'UEPROJET PROMETTEUR : NOUVEAU LCR-MÈTRE 50 HZ – 2 MHZPrécision et confort de mesureERREURS FÉCONDESLes seules vraies erreurs sont celles dont personne ne tire aucune leçonBUREAU D'ÉTUDES – ZONE DD comme développement, débrouille et dur-à-cuire ! Trucs et astuces, bonnes pratiques et autres informations utilesBANC D'ESSAI : CHARGE ÉLECTRONIQUE SDL1020X-EALIMENTATION HAUTE TENSION AVEC TRACEUR DE COURBESDes tensions régulées jusqu'à 400 V & des courbes caractéristiques de tubesHEXADOKUcasse-tête pour elektorniciensCONCEPTION DE FILTRES ANALOGIQUES (1ÈRE PARTIE)Étude de cas nº2 – 1 : la théorie du filtrage analogiqueDESSINE-MOI UN SCHÉMAEasyEDA
€ 10,95
-

Elektor Digital Elektor septembre/octobre 2021 (PDF)
VOYAGE DANS LES RÉSEAUX NEURONAUX (1ÈRE PARTIE)Les neurones artificielsTEST DE PRÉCONFORMITÉ CEM POUR UN PROJET ALIMENTÉ EN COURANT CONTINUPartie 1 : RSIL double continuCHARGE ÉLECTRONIQUE EN CC ET CAJusqu'à 400 V et 10 A (crête)DÉMARRER EN ÉLECTRONIQUE (9)N'ayez pas peur du choc... un peu de « self control » suffit !TRAITEMENT D'IMAGES AVEC LE MODULE JETSON NANO DE NVIDIA (1ÈRE PARTIE)Matériel et logicielZOOM SUR LES TRANSFORMATEURS SECTEURComportement transitoire à l'allumage et l'extinction« YES WE CAN » AVEC PICAN 3Module de bus CAN pour le Raspberry Pi 4CENTRALE SOLAIRE SUR BALCONUn investissement vite amortiPRISE DE VUE ET DIFFUSION VIDÉO EN CONTINU AVEC UN RASPBERRY PI 4La caméra Raspberry Pi HQ en actionUTILISATION D'ÉCRANS DANS LES PROJETS RASPBERRY PIExtrait : écrans à diodes électroluminescentes organiques (OLED)PROPELLER 2 DE PARALLAX (4)Envoi de chaînes de caractères60 ANS D'ELEKTORRegard sur septembreDANS L'ANTRE DE…Menno van der Veen et de ses tubes amplificateursCIRCUITS HYBRIDESROSE DES VENTS AVEC LE CAPTEUR GY-271Ou pourquoi il faut faire des huit pour calibrer un capteurMESUREZ VOTRE EMPREINTEÉlectronique et émissions de gaz à effet de serreTHERMOSTAT CONNECTÉ À ESP32Conservez votre vin à la bonne température !LÉVITATION MAGNÉTIQUE, VERSION NUMÉRIQUEComparateur analogique remplacé par un ESP32 PicoULTIMATE ARDUINO UNO HARDWARE MANUAL - FR TRANSLATIONExtrait : chargeur d'amorçage du microcontrôleur principalMICROPYTHON POUR L'ESP32 ET SES COPAINSPartie 2 : piloter facilement les écrans matricielsCARTE MADMACHINE SWIFTIOUn langage récent pour du matériel tout nouveauSUR LE VIFPassions incertainesHEXADOKUCasse-tête pour elektorniciens
€ 10,95
-

Elektor Digital Elektor septembre/octobre 2022 (PDF)
electronica Fast Forward Start- & Scale-Up AwardsLes préparatifs s'accélèrent !Bluetooth Low Energy avec ESP32-C3 et ESP32Vous n'avez pas toujours besoin de choisir le wifi !Renifleur BLEReconfiguration du dongle USB nRF52840 MDK de makerdiaryCube magique de LED RGBcircuit avec un RP2040Marche/arrêt automatique pour le compresseur de pâte à souderContenu vidéo d'ElektorLivestreams, webinaires et cours pour les ingénieurs et les fabricants professionnelsÉlectrification d'un véloUtilisation d'un kit de modification de vélo électriqueDémarer en électroniqueMultiplication de tensionsSur le vifTransmutationsTeensy 4.0 – comment cette carte peut-elle être aussi rapide ?Ou: La vitesse, ce n'est pas sorcier !Simulation d'amplificateur de puissance audio avec TINA« simuler avant de construire »Développer et utiliser vos nœuds LoRaWAN pour l'Internet des Objets (IdO)Exemple de chapitre : Modules LoRaWAN Dragino LHT65, LDS01 et LDS02Projet 2.0Corrections, mises à jour et courriers des lecteurs5G pour mon propre exploitMaîtrise totale du déploiement de la 5G avec les réseaux cellulaires privésInfographicsLes meilleurs conseils pour développer une interface WiFiComment mon appareil apprend-il à transmettre ?Horloge Tour du Rhin Mod 2Analyseur de spectre audio avec dekatronsUne nouvelle façon d'utiliser les tubes rétroEnvoi de données à TelegramAvec un ESP32 et quelques composantsFiltre coupe-bande de Fliege pour les mesures audioFaites de meilleures mesures avec un filtre coupe-bandeDémontage d'un CO2-mètrePeut-on le bidouiller pour vos projets ?Tout mis ensembleLe transistor unijonction programmable expliquéÉcran tactile rond pour Raspberry PiL'HyperPixel 2.1 Round de PimoroniTélémesure avec détection des pertes de connexionGrâce aux modules nRF24L01+Récepteur FM numérique avec Arduino et TEA5767Restez à l'écoute avec un Arduino NanoConvertir une interface OLED de SPI vers I²CHomeLab ToursUn passe-temps ne prend pas sa retraiteUne décennie d'éthique en électroniqueLe regard de Tessel Renzenbrink sur la société numérique.HexadokuThe Original Elektorized Sudoku
€ 10,95
-
Elektor Digital Elektor septembre/octobre 2023 (PDF)
Le chargeur intégré est disponible pour nos clients OR et VERT sur le site d'Elektor Magazine ! Pas encore membre ? Cliquez ici . Raspberry Pi Pico comme analyseur de spectre des FFT avec du matériel bon marché régulateur de tension linéaire ±40 V une alimentation de qualité pour l'amplification du Fortissimo-100... et d'autres ! la communication sans fil des microcontrôleurs devient flexible l'EEPROM du point de vue de la mise en réseau pour les microcontrôleurs sans fil 5000 ? à gagner! participez au concours de conception d'innovation sans fil STM32 2023 : l'odyssée de l'IA en savoir plus sur le code ChatGPT LoRa, un couteau suisse (1) le protocole LoRa et ses avantages du courant réglable avec générateur de montre intégré testez vos alimentations, convertisseurs de tension et batteries les nouvelles cartes Arduino UNO R4 Minima et WiFi des potentiomètres logarithmiques qui sont exponentielles ! Carte d'interface pour pilote de moteur Un BoB pour un pilote continu de 5 A avec une taille de 3×3 mm sur le vif danger de l'électronique une architecture cellulaire de plus d'une consommation pour l'Internet des objets (IdO) ? Caractéristiques des technologies LTE-M et NB-IoT pour le développement de la basse consommation (LPWAN) communication sans utilisation de systèmes et d'aides IoT dans les modules Arduino MKR normes de communication pour les modules Arduino pour l'IoT pertes en courant alternatif dan les composants magnétiques évitez la surchauffe des inductances ! optimiser son déploiement cloud grâce aux équipements de mesure mise en œuvre de Matter : à quoi sert le déploiement des équipements de Matter ? le YARD Stick One en utilisant la méthode de test pour les fréquences de 1 GHz relais à verrouillage drôle de composant, la série PIC O?Horloge ? prendre le pouls du temps conception d'un récepteur de signaux horaires SDR Directive sur le devoir de diligence Le statu quo ne suffira pas démarrer en électronique ?amplificateur de tension activateur d'infrasons avec l'Arduino Pro Mini un projet extrait du livre 'Arduino & Co.' d'Elektor compteur d'énergie base sur le cloud avec un module ESP32 et un capteur tension/courant PZEM-004T guide de programmation Bare-Metal (2) timer précis, UART et débogage Hexadoku
€ 10,95
-

Elektor Digital Elektor Septembre/Octobre 2024 (PDF)
Le téléchargement intégral de ce numéro est disponible pour nos membres GOLD et GREEN sur le site Elektor Magazine ! Pas encore membre ? Cliquez ici. un nœud de capteurs autonometransmission de données basée sur LoRa et alimentation en énergie par cellules solaires la carte eXpansion V1.0 d'Elektorpour ESP32S3 et autres cartes XIAO une caméra dans un train miniatureinstallation d’un module ESP32 CAM antenne magnétique à large bande pour les grandes ondestous les émetteurs sans aucun accord TensorFlow Lite pour microcontrôleurspar un débutant, pour les débutants un concentrateur pour les appareils RS-422 et RS-485câbler votre bus comme une star sonde RFWith LED Bar Graph démarrer en électronique...…plus de montages à ampli-op Open Variovariomètre multifonction open source pour vol en parapente sur le vifÀ propos de prendre les choses pour acquises relevé des compteurs d'eau basé sur l'IA (Partie 2)intégrez votre ancien compteur dans l'IdO ! agriculture intelligentedétection des nuisibles basée sur l’apprentissage machine avec connectivité IdO Anybus CompactCom est le choix idéal pour la communication industrielle embarquée – voici pourquoi norme de communication IQRFfiabilité des réseaux maillés sans fil à faible débit avec perte comment construire un robot agricole intelligentquelles sont les considérations essentielles que les concepteurs de robots agricoles doivent prendre en compte et à quels défis techniques sont-ils confrontés ? filtre coupe-bande audio à fréquence réglablesolution universelle de suppression de fréquences dans le domaine audio le système LeoINAGPSsurveillez votre véhicule électrique nœud LoRa alimenté par énergie solaireune solution IdO modulaire, compacte et polyvalente AWS pour Arduino et cie. (2)transmission de données avec AWS IoT ExpressLink projet 2.0corrections, mises à jour et courrier des lecteurs 2024 : l'odyssée de l'IAexamen des Accélérateurs IA : comparaison extension de couverture Wi-Fi sur ESP32comment modifier simplement une antenne
€ 10,95























