Caractéristiques
Prend en charge la tension du moteur de 5 V à 30 V DC
Courant jusqu'à 13 A en continu et 30 A en crête
Entrée de niveau logique 3,3 V et 5 V
Compatible avec Arduino et Raspberry Pi
Fréquence PWM de contrôle de vitesse jusqu'à 20 kHz
Pont en H NMOS complet pour une meilleure efficacité Aucun dissipateur thermique n'est requis
Commande bidirectionnelle pour un moteur à courant continu à balais
Freinage récupératif
Pour plus d'informations, consultez le manuel d'utilisation
Pour la bibliothèque Arduino fournie par mon Cytron cliquez ici
Cytron Maker Pi RP2040 comprend le premier microcontrôleur conçu par Raspberry Pi - RP2040, intégré sur une carte contrôleur de robot. Cette carte est livrée avec un pilote de moteur CC à double canal, 4 ports de servomoteur et 7 connecteurs d'E/S Grove, prêts pour votre prochain projet de robot/contrôle de mouvement DIY. Vous pouvez désormais construire un robot tout en essayant la nouvelle puce RP2040. Le pilote de moteur CC peut piloter 2 moteurs CC à balais ou 1 moteur pas à pas bipolaire/unipolaire de 3,6 V à 6 V, et fournit en continu jusqu'à 1 A de courant par canal. Les boutons de test rapide intégrés et les LED de sortie du moteur offrent un moyen rapide et pratique de tester le fonctionnement du pilote de moteur sans avoir à écrire de code. Le moteur V pour les moteurs à courant continu et les servomoteurs dépend de la tension d'entrée fournie à la carte.
Le Maker Pi RP2040 possède tous les avantages des produits de la série Maker de Cytron. Il dispose également de nombreuses LED utiles pour le dépannage (et les effets visuels), est capable de faire beaucoup de bruit avec le buzzer piézo intégré et est livré avec des boutons-poussoirs prêts à détecter votre contact. Il existe trois façons d'alimenter le Maker Pi RP2040 : via une connexion USB (5 V), avec une batterie LiPo/Li-Ion monocellulaire ou via les connexions VIN (3,6-6 V). Cependant, une seule source d’alimentation est nécessaire pour alimenter simultanément la carte contrôleur et les moteurs. L'alimentation de toutes ces sources d'énergie peut être contrôlée avec l'interrupteur marche/arrêt intégré.
Cytron Maker Pi RP2040 est essentiellement la bonté de la série Raspberry Pi Pico + Maker + le contrôleur de robot et d'autres fonctionnalités utiles. Par conséquent, cette carte est compatible avec l'écosystème Pico existant. Les logiciels, micrologiciels, bibliothèques et outils développés pour Pico devraient également fonctionner de manière transparente avec Cytron Maker Pi RP2040. CircuitPython est préchargé sur le Maker Pi RP2040 et exécute un programme de démonstration simple dès la sortie de la boîte. Connectez-le à votre ordinateur via un câble micro USB et allumez-le. Vous serez accueilli par une mélodie et une lumière LED. Appuyez sur les boutons-poussoirs GP20 et GP21 pour allumer et éteindre les LED, tout en déplaçant et en arrêtant les moteurs CC et les servomoteurs connectés. Avec ce code démo vous pouvez tester la carte dès que vous la recevez ! Une fois connecté à votre ordinateur, un nouveau lecteur CIRCUITPY apparaîtra. Explorez et modifiez le code de démonstration (dossier code.py et lib) avec n'importe quel éditeur de code de votre choix, enregistrez toutes les modifications apportées au lecteur et vous le verrez en action en un rien de temps. C'est pourquoi nous adoptons CircuitPython : il est très simple de démarrer. Voulez-vous utiliser un autre langage de programmation ? Bien entendu, vous êtes libre d'utiliser MicroPython et C/C++ pour le Pico/RP2040. Pour ceux d'entre vous qui aiment l'écosystème Arduino, veuillez jeter un œil à cette actualité officielle d'Arduino ainsi qu'au Pico Arduino Core non officiel d'Earle F. Philhower. Caractéristiques
Alimenté par Rapberry Pi RP2040
Processeur Arm Cortex-M0+ double cœur
264 Ko de RAM interne
2 Mo de mémoire Flash
mêmes spécifications que le Raspberry Pi Pico
Carte contrôleur de robot
4x servomoteurs
2x moteurs DC avec boutons de test rapide
Circuit à courant variable
Sélection automatique de l'alimentation : USB 5 V, LiPo (1 cellule) ou Vin (3,6-6 V)
Chargeur LiPo/Li-Ion 1 cellule intégré (protection contre les surcharges et les décharges excessives)
Bouton ON / OFF
13x LED d'indicateur d'état pour les broches GPIO
1x buzzer piézo avec interrupteur muet
2x bouton poussoir
2x LED RVB (Néopixel)
7x ports Grove (options d'E/S flexibles : numérique, analogique, I²C, SPI, UART...)
Pré-installé avec Norme CircuitPython
Trous de fraisage
Trou de montage 4x 4,8 mm (compatible avec les broches LEGO)
6x trou de vis M3
MAIX est la famille de produits spécialement conçue par Sipeed, conçue pour alimenter l'IA à la périphérie. Déplacez les modèles d'IA du cloud vers des appareils situés à la périphérie du réseau, où ils peuvent s'exécuter plus rapidement, à moindre coût et avec plus de confidentialité. MAIX n'est pas seulement une solution matérielle, mais combine du matériel personnalisé, des logiciels ouverts et des algorithmes d'IA avancés. Différents types de développement. Les cartes, kits, périphériques et une large compatibilité permettent un développement de prototypes rapide et flexible, rendant les projets AIoT beaucoup plus faciles. Et grâce aux performances de MAIX, à son faible encombrement, à sa faible consommation d'énergie et à son faible coût, il permet le déploiement généralisé d'une Edge AI hautes performances.
Applications
Applications Smart Home telles que robots nettoyeurs, haut-parleurs intelligents, serrures de porte électroniques, surveillance domestique, etc.
Applications de l'industrie médicale telles que le diagnostic et le traitement auxiliaires, la reconnaissance d'images médicales, l'alarme d'urgence, etc.
Applications industrielles intelligentes telles que les machines industrielles, le tri intelligent, la surveillance des équipements électriques, etc.
Applications éducatives, telles que les robots pédagogiques, les plateformes interactives intelligentes, l'inspection de l'efficacité de l'éducation, etc.
Applications agricoles telles que la surveillance agricole, la surveillance des ravageurs et des maladies, le contrôle automatisé, etc.
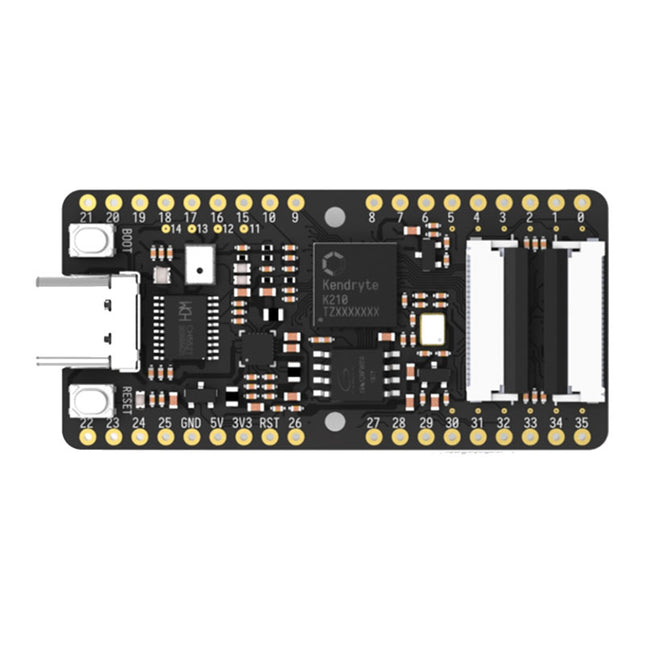
Caractéristiques
Processeur : RISC-V Dual Core 64 bits, avec FPU ; Processeur de réseau neuronal 400 MHz
Identification d'images QVGA@60FPS/VGA@30FPS
Le module ESP32 intégré prend en charge 2,4 G 802.11. b/g/n et Bluetooth 4.2
Facteur de forme Arduino Uno, interface compatible Arduino
Microphone MEMS à sortie numérique I²S omnidirectionnelle intégré
Connecteur FPC 24P 0,5 mm pour caméra DVP
Connecteur FPC MCU LCD 24P 0,5 mm 8 bits
Prend en charge le support de carte micro SD auto-élastique
Bouton de réinitialisation et de démarrage ; Sortie audio DAC+PA 3W
Il vous suffit de connecter le câble USB Type-C pour terminer le téléchargement
Vision industrielle basée sur un réseau neuronal convolutif
Processeur de réseau de microphones hautes performances pour l'audition artificielle
Prend en charge MaixPy IDE, Arduino IDE, OpenMV IDE et PlatformIO IDE
Prise en charge de Tiny-Yolo, Mobilenet et TensorFlow Lite pour l'apprentissage en profondeur
Spécifications techniques
Module maître
Module AIoT MAIX-I balayé
Entrée de puissance
USB Type-C Circuit abaisseur DC-DC : prend en charge l'entrée 6-12 V ; Sortie 5 V 1,2 A
Emplacement pour carte Micro SD (carte TF)
Porte-cartes auto-élastique
Microphone MEMS intégré
Le MSM261S4030H0 est un microphone MEMS omnidirectionnel à port inférieur et à sortie numérique I²S. Il a des performances et une fiabilité élevées.
Interface de caméra DVP
Connecteur FPC 24P 0,5 mm
Connexion LCD
Connecteur FPC 8 bits MCU LCD 24P 0,5 mm
Sortie audio
DAC+PA TM8211 : plage dynamique de 16 bits ; faible distorsion harmonique NS4150 : puissance de sortie de 3 W ; Jusqu'à 90 % d'efficacité
Module ESP32
Prend en charge 2,4 G 802.11.b/g/n Vitesses 802.11 n (2,4 GHz) jusqu'à 150 Mbps Bluetooth v4.2 standard complet, y compris le Bluetooth traditionnel (BR/EDR) et le Bluetooth Low Energy (BLE)
Tension d'alimentation provenant d'une alimentation externe
4,8 V ~ 5,2 V
Courant d'alimentation de l'alimentation externe
>600mA
Hausse de température
<30 000
Plage de température de travail
-30 ℃ ~ 85 ℃
Microcontrôleur : ESP8285
Microcontrôleur Tensilica L106 32 bits
Norme sans fil
802.11b/g/n
Gamme de fréquences
2400 MHz - 2483,5 MHz
Puissance TX (test de conduction)
802.11.b : +15 dBm 802.11.g : +10 dBm (54 Mbps) 802.11.n : +10 dBm (65 Mbps)
Connecteur d'antenne
IPEX3,0x3,0mm
Mode Wi-Fi
Station/SoftAP/SoftAP+Station
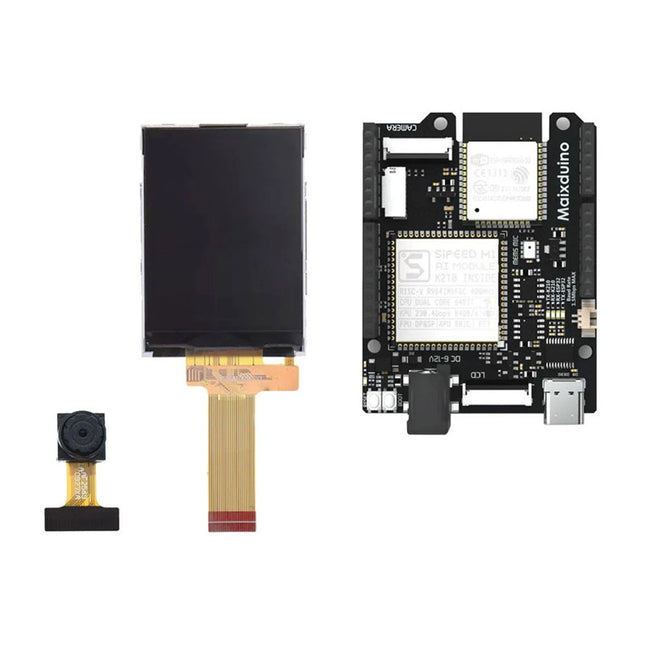
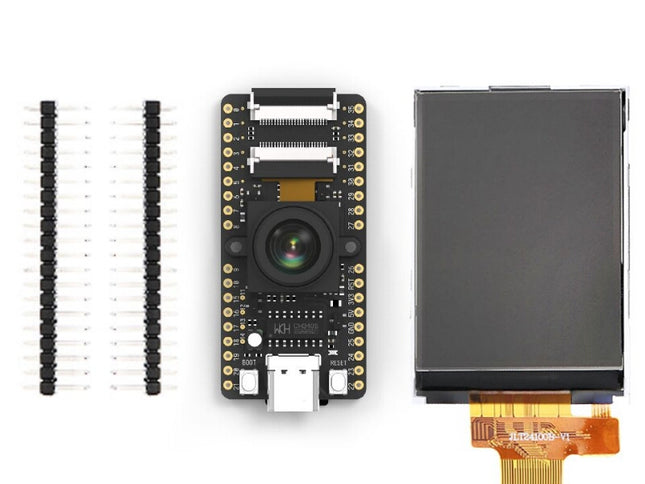
Contenu
1x carte de développement Maixduino
1x module de caméra GC0328
1x écran TFT de 2,4 pouces
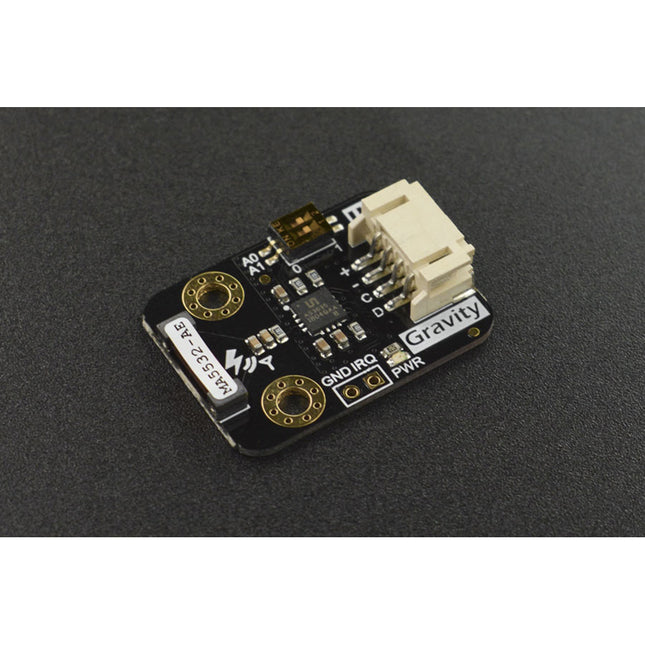
L'algorithme intégré de rejet des perturbateurs artificiels peut éviter efficacement les interférences électriques générées par divers appareils électroménagers. En plus de permettre aux passionnés de météo générale de mesurer les données locales sur les orages de manière simple et efficace, grâce à sa taille compacte et sa large plage de détection, il peut également être intégré à divers appareils portables intelligents pour un grimpeur en extérieur ou pour les personnes travaillant en hauteur.
Cela fournit une alerte précoce des orages que les gens peuvent percevoir afin que les gens puissent prendre des précautions avec une longueur d'avance. Le capteur peut également être intégré dans le dispositif de protection intérieure à l'intérieur d'un équipement sensible à la foudre, et déclencher automatiquement le passage de ces dispositifs à l'alimentation de secours afin d'isoler le réseau électrique en cas de foudre. Au moment de l'éclair, la broche d'interruption IRQ génère une impulsion. Cela peut être utilisé pour déclencher l’ouverture de l’obturateur, aidant ainsi les photographes à capturer avec précision le moment passionnant de l’éclair. La distance maximale estimée de la foudre est de 40 km. Limitée par la méthode et l'algorithme de mesure inhérents, la résolution d'estimation de la distance est de 1 à 4 km, 40 km en 15 étapes.
Caractéristiques
Détection d'éclairs dans un rayon de 40 km en 15 étapes
Détection de l'intensité lumineuse
Utilisé aussi bien à l'intérieur qu'à l'extérieur
Algorithme intégré de rejet des perturbateurs artificiels
Applications
Station météo grand public (mesure des orages)
Appareils portables (avertissement précoce d’orage extérieur)
Photographie de foudre
spécification
Tension d'entrée : 3,3 V - 5,5 V
Portée de détection maximale : 40 km
Résolution de détection de distance : 1 km - 4 km
Résolution de détection d'intensité : 21 bits, soit 0 ~ 16777201
Adresse I2C : trois options 0x03, 0x02, 0x01
Interface : Gravity I2C (niveau logique : 0-VCC)
Dimensions : 30 mm x 22 mm
Pour plus d'informations, consultez la page wiki DFRobot Gravity – Lightning Distance Sensor ici .
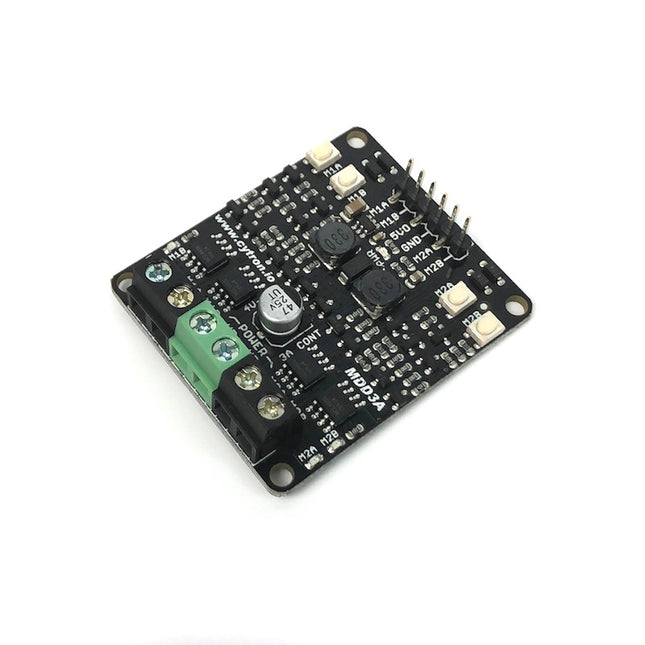
Caractéristiques
Compatible avec les tensions du moteurs de 4 V à 16 V DC.
Commande bidirectionnelle pour deux moteurs CC à balais.
Commande d'un moteur pas à pas unipolaire ou bipolaire.
Courant maximal du moteur : 3A en continu, 5A en pic.
LEDs pour l'état de la sortie du moteur.
Des boutons pour des tests rapides.
Compatible avec Arduino et Raspberry Pi
Fréquence PWM allant jusqu'à 20kHz
Protection contre les inversions de polarité
Ici, vous pouvez trouvez la fiche technique du produit..
Consultez l'exemple de code fourni par Cytron ici.
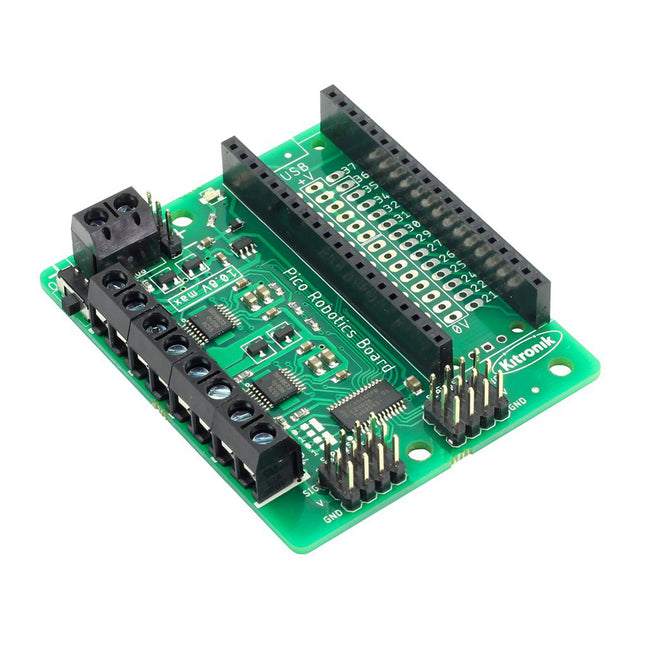
La carte robotique comprend 2 circuits intégrés de pilote de moteur à double pont en H. Ceux-ci sont capables de piloter 2 moteurs standard ou 1 moteur pas à pas chacun, avec un contrôle complet de marche avant, arrière et d'arrêt. Il existe également 8 sorties servo, capables de piloter des servos à rotation standard et continue. Ils peuvent tous être contrôlés par le Pico à l'aide du protocole I²C, via un circuit intégré pilote à 16 canaux. La sortie IO fournit des connexions à toutes les broches inutilisées du Pico. Les 27 broches d'E/S disponibles permettent d'ajouter d'autres appareils, tels que des capteurs ou des LED ZIP, à la carte. L'alimentation est fournie via un bornier ou un connecteur de type servo. L'alimentation est ensuite contrôlée par un interrupteur marche/arrêt sur la carte et il y a également une LED verte pour indiquer quand la carte est alimentée. La carte produit ensuite une alimentation régulée de 3,3 V qui est introduite dans les connexions 3 V et GND pour alimenter le Pico connecté. Cela supprime le besoin d’alimenter le Pico séparément. Les broches 3 V et GND sont également réparties sur le connecteur, ce qui signifie que des appareils externes peuvent également être alimentés.
Pour utiliser la carte robotique, le Pico doit être fermement inséré dans la prise à broches à double rangée de la carte. Assurez-vous que le Pico est inséré avec le connecteur USB à la même extrémité que les connecteurs d'alimentation de la carte robotique. Cela permettra d'accéder à toutes les fonctions de la carte et chaque broche est éclatée.
Caractéristiques
Une carte compacte mais riche en fonctionnalités conçue pour être au cœur de vos projets robotiques Raspberry Pi Pico.
La carte peut piloter 4 moteurs (ou 2 moteurs pas à pas) et 8 servos, avec un contrôle complet avant, arrière et arrêt.
Il dispose également de 27 autres points d'extension d'E/S et de connexions d'alimentation et de masse.
Les lignes de communication I²C sont également éclatées permettant de contrôler d'autres appareils compatibles I²C.
Cette carte dispose également d'un interrupteur marche/arrêt et d'un voyant d'état d'alimentation.
Alimentez la carte via un bornier ou un connecteur de type servo.
Les broches 3V et GND sont également réparties sur l'en-tête Link, permettant d'alimenter des périphériques externes.
Codez-le avec MicroPython ou via un éditeur tel que l'éditeur Thonny .
1 x carte robotique compacte Kitronik pour Raspberry Pi Pico
Dimensions : 68 x 56 x 10 mm
Exigences
Carte Raspberry Pi Pico
Raspberry Pi Pico is a great solution for servo control. With the hardware PIO, the Pico can control the servos by hardware, without usage of times/ interrupts, and limit the usage of the MCU.Le pilotage des six servos de ce bras robotique nécessite très peu de capacité de la MCU, qui peut donc s'occuper d'autres tâches. Ce bras robotique à 6 DOF est un outil pratique pour l'enseignement et l'apprentissage de la robotique et de l'utilisation de Pico. Il y a cinq servos MG996s (quatre sont nécessaires dans l'assemblage et un comme pièce de rechange) et trois servos de 25 kg (deux nécessaires dans l'assemblage et un comme pièce de rechange). Notez que pour les servos, l'angle varie de 0° à 180°. Tous les servos doivent être préréglés à 90° (avec une impulsion de 1,5 ms à 50 Hz) avant le montage pour éviter d'endommager les servos pendant le mouvement. Ce produit comprend tous les éléments nécessaires à la création d'un bras robotique basé sur Pico et Micropython.Inclus1x Raspberry Pi Pico1x Raspberry Pi Pico pilote de servo1x Set '6 DOF Robot Arm'1x Alimentation 5 V/5 A2x Servo de rechangeTéléchargementsGitHubWikiGuide d'assemblageVideo d'assemblage
Avez-vous besoin d'une simple caméra IA pour améliorer vos projets ?
La conception intuitive de la caméra HuskyLens AI permet à l'utilisateur de contrôler différents aspects de la caméra en appuyant simplement sur des boutons. Vous pouvez démarrer et arrêter l'apprentissage de nouveaux objets et même changer d'algorithme depuis l'appareil.
Pour réduire davantage le besoin de se connecter à un PC, la caméra HuskyLens AI est livrée avec un écran de 2 pouces afin que vous puissiez voir ce qui se passe en temps réel.
Caractéristiques
Processeur : Kendryte K210
Capteur d'image : OV2640 (appareil photo 2,0 mégapixels)
Tension d'alimentation : 3,3 ~ 5,0 V.
Consommation électrique (TYP) : 320 mA à 3,3 V, 230 mA à 5,0 V (mode de reconnaissance faciale ; luminosité du rétroéclairage 80 % ; lumière d'appoint éteinte)
Interface de connexion : UART, I²C
Affichage : écran IPS de 2,0 pouces avec une résolution de 320 x 240
Algorithmes intégrés : reconnaissance de visage, suivi d'objets, reconnaissance d'objets, suivi de lignes, reconnaissance de couleurs, reconnaissance d'étiquettes
Dimensions : 52 x 44,5 mm
Inclus
1x carte mère HuskyLens
1x vis M3
1x écrous M3
1x petit support de montage
1x support d'élévation
1x câble de capteur de gravité à 4 broches
Le PicoGo est un robot mobile intelligent basé sur Raspberry Pi Pico, il comprend un module à ultrasons, un module LCD, un module Bluetooth, un module de suivi de ligne et un module d'évitement d'obstacles, toutes ces fonctions sont hautement intégrées pour réaliser facilement l'évitement d'obstacles IR, le suivi de ligne automatique, Télécommande Bluetooth/IR, et plus encore. Avec diverses fonctionnalités avancées, il vous aidera à vous lancer rapidement dans la conception et le développement de robots intelligents.
Caractéristiques
En-tête Raspberry Pi Pico standard, prend en charge la série Raspberry Pi Pico
Circuit de protection de la batterie : protection contre les surcharges/décharges, protection contre les surintensités, protection contre les courts-circuits, protection contre l'inversion, fonctionnement plus stable et plus sûr.
Circuit de recharge/décharge, permet la programmation/débogage simultanément pendant la recharge
Capteur infrarouge 5 canaux, sortie analogique, combiné à un algorithme PID, suivi de ligne stable
Intégrez plusieurs capteurs de robot intelligents comme le suivi de ligne, l'évitement d'obstacles, plus de câblage compliqué
Écran LCD coloré IPS de 1,14 pouces, 240 x 135 pixels, 65 000 couleurs Intègre le module Bluetooth, permet des téléopérations telles que le mouvement du robot, la couleur de l'affichage LED RVB, le buzzer, etc. en utilisant l'application de téléphone mobile
Micro motoréducteurs N20, avec engrenages métalliques, faible bruit, haute précision
LED RVB colorée
Évitement d'obstacles IR
Le module envoie un faisceau IR et détecte les objets en recevant le faisceau IR réfléchi, pour éviter facilement les obstacles sur le chemin.
Suivi de ligne automatique
Comprend un détecteur IR à 5 canaux pour détecter et analyser la ligne noire, combiné à un algorithme PID pour ajuster le mouvement du robot, une sensibilité élevée et un suivi stable.
Capteur à ultrasons
Les ultrasons sont généralement plus rapides et faciles à calculer, adaptés à des fonctions telles que le contrôle en temps réel et l'évitement d'obstacles, avec la précision de portée pratique industrielle, ils sont largement utilisés dans la recherche et le développement de robots.
Suivi d'objet
Le robot est capable de détecter un objet frontal par ultrasons ou IR et continue de se déplacer pour suivre automatiquement la cible.
Télécommande infrarouge Intègre un récepteur IR, afin que vous puissiez contrôler le robot pour qu'il se déplace ou tourne en envoyant une lumière infrarouge depuis la télécommande.
Télécommande Bluetooth
Livré avec une application de téléphone mobile, vous permet d'utiliser le téléphone pour contrôler le mouvement du robot ou contrôler ses périphériques comme changer la couleur de la LED, faire sonner le buzzer, etc.
Contrôle des LED RVB
Inclus
1x carte de base PicoGo
1x panneau acrylique PicoGo
1 module LCD de 1,14 pouces
1x capteur à ultrasons x1
1x télécommande infrarouge
1x câble USB-A vers micro-B 1,2 m
1x câble PH2.0 à 8 broches, connecteurs latéraux opposés de 5 cm
1x Mini manchon de clé croisée
1x Tournevis
1x pack de vis et entretoises
Requis
1x Raspberry Pi Pico (en-tête pré-soudé)
1x alimentation 5V/3A
2 piles 14500
Téléchargements
Wiki
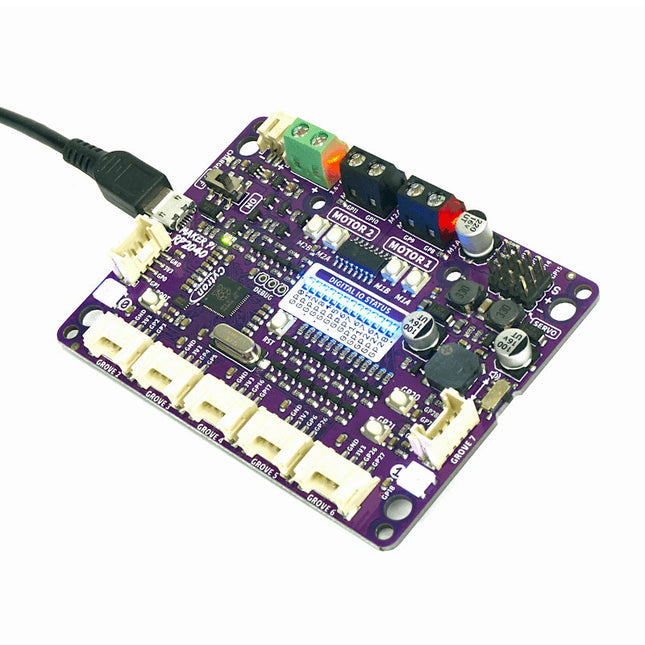
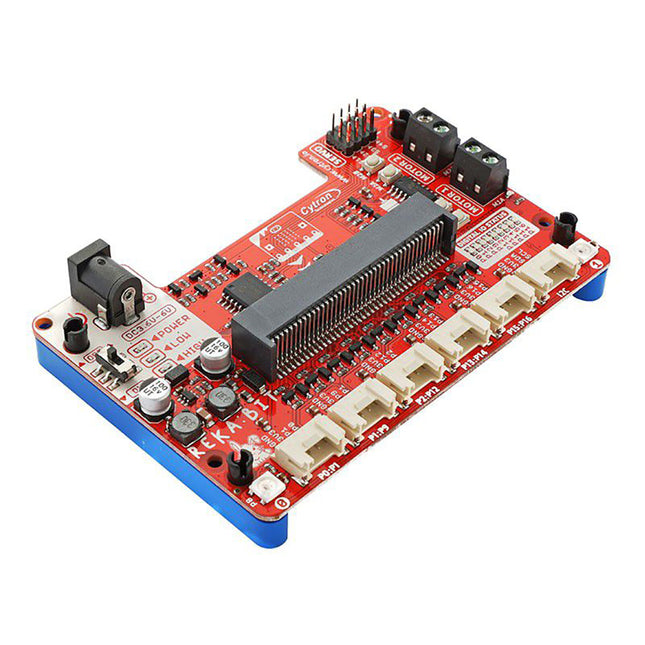
Programmez votre REKA:BIT avec Microsoft MakeCode Editor . Ajoutez simplement l'extension REKA:BIT MakeCode et vous êtes prêt à partir. Si vous êtes débutant, vous pouvez commencer par le mode de programmation par blocs ; faites simplement glisser, déposez et assemblez les blocs de codage. Pour les utilisateurs plus avancés, vous pouvez facilement passer en mode JavaScript ou Python sur MakeCode Editor pour la programmation textuelle.
REKA:BIT possède de nombreux voyants LED pour vous aider dans votre codage et votre dépannage. Il couvre les broches IO connectées aux six ports Grove et aux sorties du moteur CC du coprocesseur. On peut facilement vérifier son programme et la connexion de son circuit en surveillant ces LED.
En outre, REKA:BIT dispose également d'un indicateur marche/arrêt, de LED de sous-tension et de surtension intégrées pour donner des avertissements appropriés en cas de problème avec l'entrée d'alimentation. REKA:BIT dispose d'un coprocesseur pour gérer le multitâche plus efficacement. Jouer de la musique tout en contrôlant jusqu'à 4 servomoteurs et 2 moteurs à courant continu, animer une matrice de LED micro:bit et même éclairer des LED RVB de différentes couleurs, le tout en même temps, n'est pas un problème pour REKA:BIT.
Caractéristiques
2x bornes de moteur à courant continu Boutons de test rapide du moteur intégrés (aucun codage nécessaire)
4x ports pour servomoteur
2x LED RVB Neopixel
6x ports Grove (3,3 V)
3x entrées analogiques/ports IO numériques
2x ports E/S numériques
1x interface I²C
Prise DC pour entrée d'alimentation (3,6 - 6 VDC)
Bouton ON / OFF
Indicateur de mise sous tension
Indicateur et protection de sous-tension (FAIBLE)
Indicateur et protection de surtension (HAUTE)
Dimensions : 10,4 x 72 x 15 mm
Inclus
1x carte d'extension REKA:BIT
1x câble d'alimentation et de données USB
1x support de pile 4xAA
1x Mini tournevis
3x câble Grove vers connecteur femelle
2x bloc de construction 1x9 bras de levage
4x goupilles de friction pour blocs de construction
Attention : carte micro:bit non incluse
Entrez dans le monde de la robotique sans complications et à un prix raisonnable avec le Car Kit 01 pour Arduino. Il s'agit d'un kit qui peut être utilisé comme base pour une voiture/un robot. Le kit est très facile à assembler et prêt à fonctionner en un rien de temps. Les motoréducteurs fournis (avec axe à double extrémité) peuvent fonctionner dans une plage de tension de 3 à 9 volts. La vitesse varie entre 90 et 300 tours par minute. Le couple (gf/cm) entre 800 et 1200. Le Car Kit est compatible avec toutes les cartes Arduino. Remarque : vous devrez également ajouter d'autres composants tels qu'une source d'alimentation (piles) et un contrôleur tel qu'un Arduino avec un contrôleur de moteur. La plaque de base contient déjà les trous pour le montage d'un Arduino. Manuel d’utlisateur (en anglais)
Le Joy-Car est un robot autonome basé sur micro:bit et propose un kit d'apprentissage robotique modulaire. À l'aide du manuel détaillé, tous les assemblages et leurs fonctions dans leur ensemble sont expliqués, ainsi que les détails de la programmation et des codes.
Des capteurs tels que le suivi de ligne, les capteurs à ultrasons, infrarouges et de vitesse de roue offrent des fonctions telles que la conduite autonome et même le contrôle via Bluetooth via un deuxième micro:bit séparé.
L'équipement supplémentaire simule les clignotants, les feux, les feux de recul et le klaxon, complétant ainsi l'expérience d'une voiture robot autonome. Grâce aux LED adressables, des scénarios d'éclairage individuels peuvent également être réalisés.
Caractéristiques
Source de courant
4x piles AA
Alternativement : 4,5-9 V CC
Fonctions et caractéristiques
Apprendre les composants individuels dans leur ensemble
Convient à partir de 9 ans, idéal pour un usage scolaire
Instructions détaillées pour la programmation, y compris les codes
Langages de programmation : Micro:Python et MakeCode
Conduite autonome par détecteur de ligne, ultrasons et infrarouge
Contrôle BT via un 2ème micro:bit séparé possible
Simulation des clignotants, feux, feux de recul et klaxon
Compatible avec micro:bit v1 et v2
Capteurs inclus
2x capteur de vitesse
3x capteur de suivi de ligne
1x capteur à ultrasons
2x capteur d'obstacles
Ensemble électronique inclus
1x carte principale Joy-Car
2x motoréducteur
2x servomoteur
4x carte LED
1x boîtier de batterie
Dimensions
189x171x77mm
Articles inclus
Kit Acrylique Joy-Car
Capteurs
Assemblage électronique
Matériel de montage
Câbles de connexion
Requis
Micro BBC:bit v1 ou v2
Téléchargements
Manuel
Tutoriels MakeCode
Site web
https://joycar.joy-it.net/en/
Le SparkFun JetBot AI Kit V2.1 constitue une excellente base pour créer de nouveaux projets d'IA pour toute personne intéressée par l'apprentissage de l'IA et la création d'applications amusantes. Il est facile à installer et à utiliser et est compatible avec de nombreux accessoires populaires.
Des didacticiels interactifs vous montrent comment utiliser la puissance de l'IA pour apprendre au SparkFun JetBot à suivre des objets, à éviter les collisions, et bien plus encore. Le Jetson Nano Developer Kit (non inclus dans ce kit) offre des outils utiles tels que la bibliothèque Jetson GPIO Python et convient aux capteurs et périphériques standards ; y compris quelques nouveaux de l’écosystème SparkFun Qwiic.
De plus, l'image incluse est livrée avec les fonctionnalités avancées de JetBot ROS (Robot Operating System) et AWS RoboMaker Ready avec AWS IoT Greengrass déjà installé. Le kit JetBot AI de SparkFun est le seul kit sur le marché aujourd'hui qui va au-delà des exemples JetBot standard et pénètre dans le monde de la robotique connectée et intelligente.
Le kit comprend tout ce dont vous avez besoin pour démarrer avec JetBot, à l'exception d'un tournevis cruciforme et d'une interface graphique de bureau Ubuntu. Veuillez noter que la possibilité de faire fonctionner plusieurs réseaux de neurones en parallèle n'est possible qu'avec une alimentation complète de 5 V-4 A.
Caractéristiques
Écosystème SparkFun Qwiic pour la communication I2C
L'écosystème peut être étendu avec 4x connecteurs Qwiic
Exemples d'applications pour le mouvement de base, la téléopération, l'évitement de collision et le suivi d'objets
Version compacte pour optimiser le réseau neuronal NVIDIA existant
Caméra FOV 136° pour la vision industrielle
Carte MicroSD pré-flaschée
Le châssis offre des possibilités d'extension
Compris
Carte MicroSD de 64 Go - image SparkFun JetBot pré-flashétée :
Image de base Nvidia Jetbot avec installé : package de bibliothèque SparkFun Qwiic Python
Pilote pour l'adaptateur WiFi Edimax
L'herbe verte
JetbotROS
Caméra grand angle et câble ruban Leopard Imaging 136FOV
Adaptateur WiFi EDIMAX
Pilote de moteur SparkFun Qwiic
SparkFun Micro OLED Breakout (Qwiic)
Tout le matériel et l'électronique de prototypage nécessaires pour compléter votre robot entièrement fonctionnel !
Requis
Kit de développement NVIDIA Jetson Nano
Vous trouverez ici le manuel d'installation fourni par SparkFun !
Il y a 20 ans, les robots basés sur de simples processeurs 8 bits et des capteurs tactiles étaient la norme. Il est désormais possible de construire des robots multicœurs capables de réagir avec intelligence à leur environnement. Les robots d'aujourd'hui combinent les données des capteurs d'accéléromètres, de gyroscopes et de capteurs de vision par ordinateur pour apprendre leur environnement. Ils peuvent réagir avec des algorithmes de contrôle avancés et traiter les données à la fois localement et dans le cloud.
Couvrant la théorie et les meilleures pratiques associées aux technologies robotiques avancées, ce livre a été écrit pour aider les roboticiens, amateurs et professionnels, à faire passer leurs conceptions au niveau supérieur. Comme nous le verrons, la création d’applications avancées ne nécessite pas de technologie robotique extrêmement coûteuse. Il suffit simplement de connaître les technologies existantes et la meilleure façon de les utiliser. Chaque chapitre de ce livre présente l'une de ces différentes technologies et explique comment l'utiliser au mieux dans une application robotique. Du côté du matériel, nous aborderons les microcontrôleurs, les servos et les capteurs, ce qui, espérons-le, vous inspirera à concevoir vos propres systèmes de nouvelle génération. Côté logiciels, nous couvrons les langages de programmation, le débogage, les algorithmes et les machines à états. Nous nous concentrons sur l'Arduino, le Parallax Propeller, Revolution Education PICAXE et les projets dans lesquels j'ai participé, notamment le robot éducatif TBot, l'oscilloscope PropScope, le langage de programmation visuel 12Blocks et l'environnement de développement ViewPort. De plus, nous proposons une introduction complète à un certain nombre de sujets essentiels, notamment les technologies de sortie (par exemple les LED, les servomoteurs) et les technologies de communication (par exemple l'infrarouge, l'audio), que vous pouvez utiliser pour développer des systèmes qui répondent aux stimuli et communiquent avec les humains et d'autres robots. Pour rendre ces sujets aussi accessibles que possible, des diagrammes utiles, des exemples de code et des conseils pratiques concernant la construction et le débogage sont inclus.
Hanno Sander
Christchurch, Nouvelle-Zélande
Le bras Grab-it Robot est produit dans un modèle solide spécial.
Le cadre du bras est en aluminium anodisé noir très solide.
La livraison comprend 6 servomoteurs contrôlés par PWN, conçus pour une pression de 20 kg/cm. Il existe donc une large gamme d'utilisation et des réserves de puissance suffisantes pour vos projets. La plage de pression de la griffe de précision est adaptée au bras et capable de travailler sous la même pression. Le bras est fourni avec un plateau rotatif (360°) sur lequel il doit être monté. Le plateau tournant sera monté sur une plaque de base de 28,5 x 16 cm. Il existe déjà des trous pour tous les ordinateurs monocartes et cartes de développement courants (Raspberry Pi, Banana Pi, Arduino, etc.).
Pour un contrôle simple et précis, nous recommandons MotorPi (pour Raspberry Pi) ou Motorino (pour Arduino).
Points forts &; Détails
Matériau : aluminium robuste, anodisé noir
dont 6 pièces 20 kg/cm PWM/servomoteurs
Plage de tension 5 à 7,4 V CC
Transmission à engrenages métalliques
avec plaque de base avec trous pour tous les ordinateurs monocartes et cartes de développement courants
avec griffe de précision de haute qualité
moteurs
Couple de 21,5 kg/cm à 7,4 V Tension cc 5 V-7,4 V Angle mécanique de 360°, plage de travail de 180° engrenage métallique contrôlable via PWM consommation de courant 5 mA à 2 A (par moteur)
Moteur Cadre
Profilé en aluminium
Dimensions
Plaque de base 28,5 x 16 cm Hauteur : selon la position du bras, jusqu'à 42 cm
Hauteur Gamme
Près d'un pied du centre de la plaque tournante
Plaque de base
Acrylique de 4,5 mm avec option de montage pour Raspberry Pi A+/B+/2/3, CubieBoard, Arduino Mega, Banana Pi M2, pcDuino et bien d'autres. Ouvertures avec entretoises pour fixation sur une plaque de base
Composants Composants
Bras de robot en pièces détachées avec plaque de rotation, griffe, plaque de base et matériel de montage, 6 moteurs
Accessoires recommandés
MotoPi (contrôleur de moteur pour Raspberry Pi) Motorino (contrôleur de moteur pour Arduino)
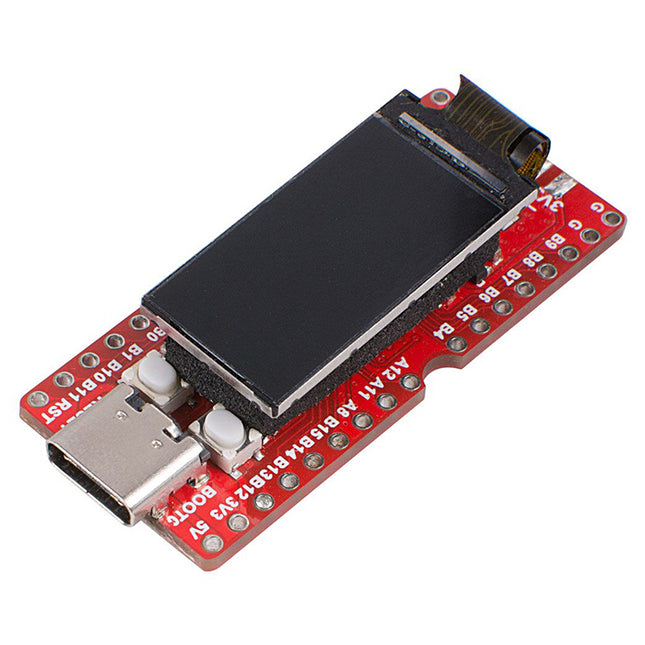
Carte de développement Longan Nano, conception de disposition de broches à double rangée, espacement des aiguilles de 700 mil, peut être directement insérée dans la planche à pain ; Oscillateur à cristal passif 8M intégré, oscillateur à cristal basse vitesse RTC 32,768 kHz, emplacement Mini TF et utilisation d'une interface USB de type C.
Longan Nano prend en charge plusieurs méthodes de téléchargement : téléchargement USB DFU, téléchargement UART ISP, téléchargement JTAG. En mode de téléchargement USB DFU, vous n'avez besoin que d'un câble USB Type-C pour télécharger le programme sur la carte de développement. Dans le même temps, le Longan Nano prend en charge l'interface JTAG standard, qui peut être déboguée en ligne à l'aide du débogueur RISC-V disponible dans le commerce ou d'un débogueur compatible JTAG tel que J-Link.
Entre-temps, Sipeed a adapté l'IDE PlatformIO pour la carte de développement Longan Nano, qui peut être développée visuellement sur plusieurs plateformes, telles que Windows/Linux : https://github.com/sipeed/platform-gd32v
Caractéristiques
Flash intégré de 128 Ko, SRAM de 32 Ko
4 minuteries à usage général de 16 bits, 2 minuteries de base de 16 bits, 1 minuterie avancée de 16 bits
Chien de garde, RTC, Systick
3x USART, 2x I²C, 3x SPI, 2x I²S, 2x CAN, 1x USBFS (OTG)
2x ADC (10 canaux), 2x DAC
Spécifications techniques
CPU
GD32VF103CBT6 basé sur le cœur RISC-V 32 bits
Consommation électrique du noyau
À peine 1/3 du Cortex-M3 traditionnel
Intégré
Mémoire flash de 128 Ko, mémoire SRAM de 32 Ko
Périphérique
- 4x minuterie à usage général 16 bits, 2x minuterie de base 16 bits, 1x minuterie avancée 16 bits - Chien de garde, RTC, Systick - 3x USART, 2x I²C, 3x SPI, 2x I²S, 2x CAN, 1x USBFS (OTG), - 2x ADC (10 canaux), 2x DAC
Logiciel
EDI
PlatformIO IDE, supporte le débogage, Arduino
Compiler la chaîne d'outils et le débogueur
GCC, OpenOCD
Système opérateur
Fil RT、LiteOS
Matériel
Extension matérielle
Emplacement pour carte TF court
Extension de l'affichage
Extension de bloc FPC 8 broches 0,5 mm 160 x 80 RVB IPS LCD (interface SPI)
Interface de débogage
2x4 broches mènent à l'interface de débogage JTAG
Connecteur
Goupille à double rangée au pas de 2,54
Cristal
Cristal passif haute vitesse 8 MHz + cristal RTC basse vitesse 32,768 kHz
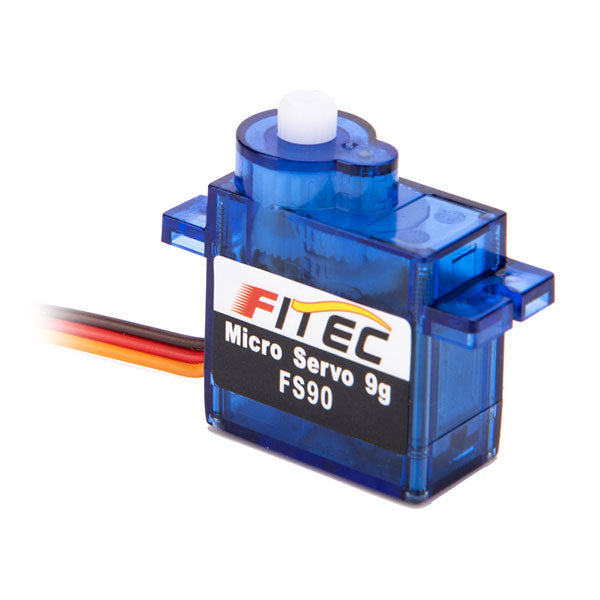
Caractéristiques
Taille
23,2 x 12,5 x 22 mm
Poids
9g
Type d'engrenage
Équipement en plastique (Nylon et POM)
Angle limite
120
Palier Pas de roulements à billes
Cannelure d'engrenage de klaxon
20T (4,8 mm)
Type de klaxon
Plastique, POM
Cas
Nylon et fibre de verre
Fil de connecteur
200mm
Moteur
Moteur à balais métalliques
Résistance à l'eau
Non
Inclus
1x servomoteur FeeTech FS90
1x klaxon de servo droit à une extrémité
1x klaxon de servo droit à double extrémité
1x klaxon de servo droit à double extrémité ailé
1x klaxon de servo étoile à quatre branches
1x klaxon de servo rond
1x vis de klaxon de servo
2x vis de montage du servo FS90
Téléchargements
Mode d'emploi
La prochaine évolution du robot Tinkerkit Braccio, Arduino Braccio ++ est un bras robotique conçu uniquement pour l'enseignement supérieur, notamment les écoles d'ingénieurs et les instituts universitaires de technologie - ou même les lycéens et étudiants qui étudient les sciences, les sciences industrielles ou la technologie.
Arduino Braccio ++ est entièrement optimisé et peut être assemblé de plusieurs façons pour de multiples tâches, par exemple pour déplacer des objets, monter une caméra et suivre vos gestes, ou fixer un panneau solaire et suivre le mouvement du soleil. Ses utilisations sont presque illimitées.
Les élèves apprendront les applications concrètes des concepts physiques en soulevant, plaçant et faisant tourner un objet. Ces concepts incluent les mouvements, les forces, les couples moteurs, les rapports de vitesse, la stabilité et le poids de la charge utile.
Arduino Braccio ++ offre dès le début une multitude de possibilités expansives, notamment un nouveau porteur Braccio avec écran LCD, de nouveaux servomoteurs RS485 et une expérience inédite. Le principal matériau utilisé pour construire l'Arduino Braccio ++ est un plastique recyclé et écologique appelé EcoAllene. Il s'agit d'une matière plastique obtenue à partir de polyamine recyclée que l'on trouve dans les cartons alimentaires, ce qui signifie que toutes les pièces en plastique de l'Arduino Braccio ++ sont durables et 100 % recyclables.
Téléchargements
Braccio Carrier
Cette caméra adopte la technologie d'imagerie 3D à lumière structurée binoculaire pour obtenir des images de profondeur et réaliser la fonction de modélisation des informations de profondeur. Il est équipé d'une puce de calcul de profondeur dédiée et est spécialement optimisé pour éviter les obstacles des robots. La caméra est de taille compacte, facile à intégrer, avec une interface de sortie standard USB2.0, offrant aux utilisateurs un haut degré de flexibilité. Il peut être adapté à des environnements complexes tels que des environnements entièrement noirs, en intérieur avec une lumière forte ou une lumière faible, un contre-jour ou une lumière douce, même en semi-extérieur, ce qui présente une large gamme d'applications.
Caractéristiques
Offre une sortie d’image haute résolution de 1 280 x 920
Utilise la technologie d'imagerie 3D à lumière structurée binoculaire
Interférence intrépide de la lumière ambiante
Les processeurs de calcul approfondi utilisent des puces dédiées hautes performances
Interface de sortie standard USB2.0
Caractéristiques
Distance de détection : 20-250 cm
Erreur de précision : <1,5 cm
Résolution : 1280 x 920 pixels
VOHF : 78 ±3°
FOV : 60 ±3°
Puissance : 1,5 W
Source de lumière active : Spectre : 830-850 nm | Puissance : <1,5 W
Anti-poussière et étanche : IP65
ESD : Décharge par contact : ±8 KV | Antiaérien : ±12 KV
Interface : USB2.0
Température de fonctionnement : -10 ~ 50 °C
Humidité de fonctionnement : 0 ~ 80 RH
Température de stockage : -20 ~ 80 °C
Poids : 96g
Téléchargements
Fiche de données
Manuel de l'Utilisateur
Manuel de développement
SDK
Outil
ROS
La carte Sipeed AI & IoT n'est pas seulement du matériel, mais fournit également une infrastructure matérielle et logicielle de bout en bout pour le déploiement de solutions basées sur l'IA.
La carte Sipeed AI & IoT peut être utilisée pour un nombre croissant de cas d'utilisation tels que :
maintenance prédictive
vision industrielle
reconnaissance vocale
Détection d'une anomalie
robotique
Caractéristiques
Processeur : RISC-V Dual Core 64 bits, 400 Mh réglable
Puissant dual-core 64 bits basé sur une architecture ouverte processeur avec de riches ressources communautaires
Prise en charge du débogage
Interface UART et JTAG haute vitesse pour le débogage
Interface GPIO
Tous les GPIO connectés à l'en-tête 2*20 2,54 mm
Emplacement pour carte Micro SD (carte TF)
Porte-cartes auto-élastique
Circuit de téléchargement en un clic
Connectez simplement le câble USB type C pour terminer le téléchargement CH340 intégré, débit en bauds de 2 Mbps
Connecteur de caméra DVP
Connecteur FPC 24P 0,5 mm
Connecteur LCD
Connecteur FPC 8 bits MCU LCD 24P 0,5 mm
Bouton
Bouton RST et bouton USR
CPU
1ère puce RISC-V compétitive
Processus 28 nm, IMAFDC RISC-V 64 bits double cœur, énorme SRAM haute vitesse de 8 Mo sur puce, fréquence de 400 MHz (pouvant atteindre 800 MHz)
KPU (processeur de réseau neuronal) :
64 KPU
largeur 576 bits
noyaux de convolution
toute forme de fonction d’activation.
0,25TOPS (billions d'opérations par seconde) à 0,3W 400MHz,
Lorsqu'il est overclocké à 800 MHz, il offre 0,5TOPS
APU (processeur audio)
8 micros
fréquence d'échantillonnage jusqu'à 192 kHz
Unité FFT
FPIOA (Field Programmable IO Array) flexible, vous pouvez mapper 255 fonctions sur les 48 GPIO de la puce
Caméra DVP et interface LCD MCU, vous pouvez connecter une caméra DVP, exécuter votre algorithme et afficher sur LCD
Autres accélérateurs et périphériques
Accélérateur AES
Accélérateur SHA256
Accélérateur FFT (pas celui de l'APU)
Bureau du Procureur
UART
WDT
IIC
IPS
I2S
MINUTEUR
RTC
MLI
Logiciel
La carte Sipeed AI & IoT prend en charge le SDK autonome original, le SDK FreeRTOS basé sur C/C++. Vous pouvez porter micropython dessus : http://en.maixpy.sipeed.com/.
Il prend également en charge FPIOA, GPIO, TIMER, PWM, Flash, OV2640, LCD. Et il contient zmodem, vi, SPIFFS, afin que vous puissiez éditer python directement ou le fichier sz/rz à bord. Seedstudio offre encore plus de soutien à votre projet avec ses contributions GitHub : https://github.com/sipeed/MaixPy https://github.com/sipeed/MaixPy_Doc_Us_En_Backup
L'apprentissage en profondeur
La carte Sipeed AI & IoT prend en charge un modèle à virgule fixe qui entraîne le cadre de formation traditionnel, selon des règles de restriction spécifiques, et dispose d'un compilateur de modèles pour compiler les modèles dans son format de modèle. Il prend en charge tiny-yolo, mobilenet-v1 et TensorFlow Lite ! De nombreux modèles TensorFlow Lite peuvent être compilés et exécutés sur la carte Sipeed AI & IoT !
Fonctionnalités du logiciel
Prise en charge de FreeRtos et du kit de développement Standard
Prise en charge de MicroPython sur M1
Vision industrielle basée sur un réseau neuronal convolutif
Processeur de réseau de microphones hautes performances
Spécifications électriques
Tension d'alimentation
4,8 V ~ 5,2 V
Courant d'alimentation
>600 mA
Hausse de température
<30 000
Température de fonctionnement
-30 ℃ ~ 85 ℃
L’IA est aujourd’hui omniprésente, des applications grand public aux applications d’entreprise. Avec la croissance explosive des appareils connectés, combinée à une demande de confidentialité, de faible latence et de contraintes de bande passante, les modèles d'IA formés dans le cloud doivent de plus en plus être exécutés à la périphérie.
MAix est le module spécialement conçu par Sipeed, conçu pour exécuter l'IA en périphérie, nous l'avons appelé AIoT. Il offre des performances élevées dans un faible encombrement physique et énergétique, permettant le déploiement d'une IA de haute précision à la périphérie, et son prix compétitif permet de l'intégrer à n'importe quel appareil IoT. Comme vous le voyez, Sipeed MAIX ressemble beaucoup à Google Edge TPU, mais il agit comme un contrôleur principal et non comme un accélérateur comme Edge TPU. Il est donc plus économique et moins gourmand en énergie que la solution AP + Edge TPU.
Caractéristiques
Il est deux fois plus grand que M1, 1 x 2 pouces, compatible avec les planches à pain et également compatible SMT.
Il intègre une puce USB2UART, un circuit de téléchargement automatique, une LED RVB, un connecteur FPC de caméra DVP (prend en charge la petite caméra FPC et la caméra M12 standard), un connecteur FPC LCD MCU (prend en charge notre écran LCD QVGA de 2,4 pouces), un emplacement pour carte TF.
MAix BiT est capable d'ajuster la tension du noyau ! vous pouvez régler de 0,8 V ~ 1,2 V, overclocker à 800 MHz !
Spécifications techniques
Processeur : RISC-V Dual Core 64 bits, 400 MHz réglable
Puissant processeur dual-core 64 bits basé sur une architecture ouverte avec de riches ressources communautaires
Prise en charge du débogage
Interface UART et JTAG haute vitesse pour le débogage
Interface GPIO
Tous les GPIO connectés à l'en-tête 2*20 2,54 mm
Emplacement pour carte Micro SD (carte TF)
Porte-cartes auto-élastique
Circuit de téléchargement en un clic
Connectez simplement le câble USB type C pour terminer le téléchargement CH340 intégré, qui prend en charge un débit en bauds de 2 Mbps
Connecteur de caméra DVP
Connecteur FPC 24P 0,5 mm
Connecteur LCD
Connecteur FPC 8 bits MCU LCD 24P 0,5 mm
Bouton
Bouton RST et bouton USR
CrowBot BOLT est une voiture robot open source contrôlée par ESP32, intelligente, simple et facile à utiliser. Il est compatible avec les environnements Arduino et MicroPython, avec programmation graphique via Letscode. 16 parcours d'apprentissage avec des expériences intéressantes sont disponibles.
Caractéristiques
16 leçons en trois langues (Letscode, Arduino, Micropython), apprentissage rapide et expériences amusantes
Compatible avec Arduino, environnement de développement MicroPython, utilisant la programmation graphique Letscode, facile à utiliser
Une forte évolutivité, avec une variété d'interfaces, peut être étendue et utilisée avec les modules Crowtail
Une variété de modes de télécommande, vous pouvez utiliser la télécommande infrarouge et le joystick pour contrôler la voiture
Spécifications
Processeur
ESP32-Wrover-B (8 Mo)
La programmation
Letscode, Arduino, Micropython
Methode de CONTROLE
Télécommande Bluetooth/télécommande infrarouge
Saisir
Bouton, capteur de lumière, module de réception infrarouge, capteur à ultrasons, capteur de suivi de ligne
Sortir
Buzzer, lumière RVB programmable, moteur
Wi-Fi et Bluetooth
Oui
Capteur de lumière
Peut réaliser la fonction de chasser la lumière ou d'éviter la lumière
Capteur à ultrasons
Lorsqu'un obstacle est détecté, l'itinéraire de conduite de la voiture peut être corrigé pour éviter l'obstacle
Capteur de suivi de ligne
Peut faire bouger la voiture le long des lignes sombres/noires, juger et corriger intelligemment le chemin de conduite
Avertisseur sonore
Peut faire sonner/siffler la voiture, apportant une expérience sensorielle plus directe
Lumière RVB programmable
Grâce à la programmation, il peut afficher des lumières colorées dans différentes scènes
Récepteur infrarouge
Recevez des signaux de télécommande infrarouge pour réaliser la télécommande
Interfaces
1x USB-C, 1x I²C, 1x A/D
Type de moteur
Moteur à engrenages micro CC GA12-N20
Température de fonctionnement
-10 ℃ ~ + 55 ℃
Source de courant
4 piles 1,5 V (non incluses)
Vie de la batterie
1,5 heures
Dimensions
128x92x64mm
Poids
900g
Inclus
1x châssis
1x capteur à ultrasons
1x support de batterie
2x roues
4x vis M3x8mm
2x colonne en cuivre M3x5 mm
2x plaques acryliques latérales
1x plaques acryliques avant
1x tournevis
2x câble Crowtail 4 broches
1x câble USB-C
1x télécommande infrarouge
1x instructions et carte du tracé de la ligne
1x Joystick
Téléchargements
Wiki
CrowBot-BOLT_Assembly-Instruction
Joystick-pour-CrowBot-BOLT_Assembly-Instruction
CrowBot_BOLT_Beginner's_Guide
Conception de documents ou CrowBot
Conception de documents de joystick
Code de leçon
modèle 3D
Code source d'usine
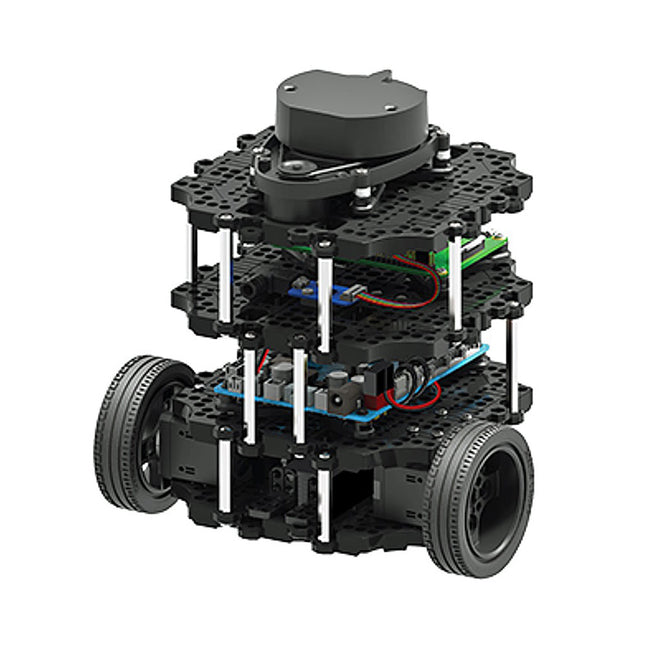
TurtleBot est le robot open source le plus populaire pour l'éducation et la recherche. La nouvelle génération de TurtleBot3 est un petit robot mobile, peu coûteux, entièrement programmable, basé sur ROS, modulaire, compact et personnalisable. Il est destiné à être utilisé pour l'éducation, la recherche, les loisirs et le prototypage de produits.
Avec TurtleBot, vous pourrez construire un robot capable de se déplacer dans votre maison, de voir en 3D et d'avoir suffisamment de puissance pour créer des applications passionnantes.
La plateforme ROS la plus populaire au monde
TurtleBot est le robot open source le plus populaire pour l'éducation et la recherche. La nouvelle génération de TurtleBot3 est un petit robot mobile, peu coûteux, entièrement programmable et basé sur ROS. Il est destiné à être utilisé pour l'éducation, la recherche, les loisirs et le prototypage de produits.
Coût abordable
TurtleBot a été développé pour répondre aux besoins économiques des écoles, des laboratoires et des entreprises. TurtleBot3 est le robot le plus abordable parmi les robots mobiles SLAM équipés d'un capteur de distance laser 360° LDS-01.
Petit format
Les dimensions de TurtleBot3 Burger ne sont que de 138 x 178 x 192 mm (L x L x H). Sa taille représente environ 1/4 de celle de son prédécesseur. Imaginez que vous puissiez garder TurtleBot3 dans votre sac à dos, développer votre programme et le tester partout où vous allez.
Norme ROS
La marque TurtleBot est gérée par Open Robotics, qui développe et entretient ROS. Aujourd'hui, ROS est devenu la plateforme de référence pour tous les roboticiens du monde entier. TurtleBot peut être intégré avec des composants robotiques existants basés sur ROS, mais TurtleBot3 peut être une plateforme abordable pour ceux qui veulent commencer à apprendre ROS.
Extensibilité
TurtleBot3 encourage les utilisateurs à personnaliser sa structure mécanique avec quelques options alternatives : carte embarquée open source (comme carte de contrôle), ordinateur et capteurs. TurtleBot3 Burger est une plate-forme à deux roues à entraînement différentiel, mais sa structure et sa mécanique peuvent être personnalisées de nombreuses façons : Voitures, vélos, remorques, etc. Développez vos idées au-delà de l'imagination avec différents SBC, capteurs et moteurs sur une structure évolutive.
Actionneur modulaire pour robot mobile
TurtleBot3 est capable d'obtenir des données spatiales précises en utilisant 2 DYNAMIXEL dans les articulations des roues. Les DYNAMIXEL de la série XM peuvent être utilisés selon l'un des 6 modes de fonctionnement (série XL : 4 modes de fonctionnement) : Mode de contrôle de la vitesse pour les roues, mode de contrôle du couple ou mode de contrôle de la position pour les articulations, etc. DYNAMIXEL peut même être utilisé pour fabriquer un manipulateur mobile qui est léger mais qui peut être contrôlé avec précision grâce au contrôle de la vitesse, du couple et de la position. DYNAMIXEL est un composant c?ur qui rend TurtleBot3 parfait. Il est facile à assembler, à entretenir, à remplacer et à reconfigurer.
Carte de contrôle ouverte pour ROS
La carte de contrôle est open-source au niveau du matériel et du logiciel pour la communication ROS. La carte de contrôle OpenCR1.0 est suffisamment puissante pour contrôler non seulement les capteurs DYNAMIXEL mais aussi les capteurs ROBOTIS qui sont fréquemment utilisés pour des tâches de reconnaissance de base de manière rentable. Différents capteurs tels que les capteurs tactiles, les capteurs infrarouges, les capteurs de couleur et bien d'autres sont disponibles. L'OpenCR1.0 possède un capteur IMU à l'intérieur de la carte afin d'améliorer la précision du contrôle pour d'innombrables applications. La carte dispose d'alimentations de 3,3 V, 5 V et 12 V pour renforcer les gammes d'appareils informatiques disponibles.
Des lignes de capteurs fortes
TurtleBot3 Burger utilise un LiDAR 360° amélioré, une unité de mesure inertielle à 9 axes et un encodeur précis pour votre recherche et développement.
Source ouverte
Le matériel, le micrologiciel et le logiciel de TurtleBot3 sont des logiciels libres, ce qui signifie que les utilisateurs sont invités à télécharger, modifier et partager les codes sources. Tous les composants de TurtleBot3 sont fabriqués en plastique moulé par injection afin de réduire les coûts, mais les données de CAO 3D sont également disponibles pour l'impression 3D.
Spécifications
Vitesse de translation maximale
0,22 m/s
Vitesse de rotation maximale
2,84 rad/s (162,72 deg/s)
Charge utile maximale
15 kg
Taille (L x L x H)
138 x 178 x 192 mm
Poids (+ SBC + batterie + capteurs)
1 kg
Seuil de montée
10 mm ou moins
Durée d'utilisation prévue
2h 30m
Temps de charge prévu
2h 30m
SBC (ordinateur à carte unique)
Raspberry Pi 4 (2 Go de RAM)
MCU
ARM Cortex-M7 32 bits avec FPU (216 MHz, 462 DMIPS)
Actionneur
XL430-W250
LDS (capteur de distance laser)
Capteur de distance laser 360 LDS-01 ou LDS-02
IMU
Gyroscope 3 axesAccéléromètre 3 axes
Connecteurs d'alimentation
3,3 V/800 mA5 V/4 A12 V/1 A
Connecteurs d'extension
GPIO 18 brochesArduino 32 broches
Périphériques
3x UART, 1x bus CAN, 1x SPI, 1x I²C, 5x CAN, 4x OLLO 5 broches
Ports DYNAMIXEL
3x RS485, 3x TTL
Audio
Plusieurs séquences de bips programmables
DEL programmables
4x LED utilisateur
LED d'état
1x LED d'état de la carte1x LED Arduino1x LED d'alimentation
Boutons et interrupteurs
2x boutons poussoirs, 1x bouton Reset, 2x DIP switch
Batterie
Lithium polymère 11.1 V 1800 mAh / 19.98 Wh 5C
Connexion PC
USB
Mise à jour du micrologiciel
via USB / via JTAG
Adaptateur d'alimentation (SMPS)
Entrée : 100-240 VCA 50/60 Hz, 1.5 A @maxSortie : 12 VCC, 5 A
Téléchargements
Programmation de robots ROS
GitHub
Manuel électronique
Communauté
Le uArm Swift Pro est un bras robotique de haute qualité qui peut être utilisé dans un large éventail d'applications. Le uArm Swift Pro a été développé et optimisé pour une utilisation dans l'enseignement, ce qui signifie que de nombreux packages sont déjà disponibles pour les plateformes open source telles que ROS. Le uArm Swift Pro a une répétabilité de position de 0,2 mm et est également équipé d'un moteur pas à pas et d'un encodeur 12 bits. Ce ne sont là que quelques-unes des raisons qui font du uArm Swift Pro un excellent choix pour une utilisation pédagogique. Le kit d'impression 3D, qui permet de convertir le uArm Swift Pro en imprimante 3D en moins d'une minute, est une autre caractéristique intéressante. L'uArm peut être utilisé avec les plateformes/systèmes de développement suivants : SDK UFACTORY Arduino Python ROS GRABCAD OpenMV Application pour smartphone L'application pour smartphone iOS est déjà disponible dans l’App Store et permet de contrôler et de surveiller facilement le bras robotique. L'application pour Android est en cours de développement et sera bientôt disponible. Un exemple de vision industrielle Le GIF suivant montre l'uArm en combinaison avec l'OpenMV Machine Vision Cam M7 et les applications de reconnaissance faciale qui peuvent être mises en œuvre en MicroPython. Spécifications Degrés de liberté : 4 Répétabilité : Jusqu'à 0,2 mm Charge utile : 500 g Plage de travail : 50-320 mm Vitesse de positionnement : 100 m/s Retour de position : codeur 12 bits Dimensions : 150 x 140 x 281 mm 150 x 140 x 281 mm Poids : 2,2 kg Inclus UFactory uArm Swift Pro Body Bluetooth & Pince à vide Téléchargements Fiche technique