Inky Frame 4.0' est doté d'un écran E Ink vibrant avec 640 x 400 pixels de sept couleurs bien emballées - c'est presque autant de pixels que sur l'Inky Frame de 5,7', mais soigneusement écrasé dans un encombrement plus petit. Il y a cinq boutons avec indicateurs LED pour interagir avec l'écran, deux connecteurs Qw/ST pour brancher des sorties et un emplacement pour carte micro SD pour le stockage de photos capybara ou d'autres fichiers vitaux. Chaque cadre Inky est livré avec une paire de petits pieds en métal élégants pour que vous puissiez le poser sur votre bureau. Il y a également un connecteur de batterie pour que vous puissiez l'alimenter sans fils gênants, et quelques fonctionnalités d'économie d'énergie qui signifient que vous pouvez le faire fonctionner sur piles pendant des années.
Inky Frame 4.0' est idéal pour :
Un tableau de bord domotique ultra lisible et basse consommation
Affichage de photos stylisées, d'images pop art ou de panneaux de bandes dessinées préférés.
Affichage de jolis graphiques et lectures de capteurs locaux ou connectés sans fil
Affichage de données fascinantes provenant d'API en ligne.
Caractéristiques
Raspberry Pi Pico W à bord
Dual Arm Cortex M0+ fonctionnant jusqu'à 133 MHz avec 264 Ko de SRAM
2 Mo de mémoire flash QSPI prenant en charge XiP
Alimenté et programmable par USB micro-B
Sans fil 2,4 GHz
Écran EPD de 4,01' (640 x 400 pixels)
E Ink Gallery Palette 4000 ePaper
ACeP (Advanced Color ePaper) 7 couleurs avec noir, blanc, rouge, vert, bleu, jaune, orange.
Angles de vision ultra-larges
Consommation d'énergie ultra faible
Pas de point – 0,135 x 0,135 mm
5x boutons tactiles avec indicateurs LED
Deux connecteurs Qw/ST pour connecter des dérivations
Emplacement pour carte microSD
Puce RTC dédiée (PCF85063A) pour un sommeil/réveil profond
Entièrement assemblé (aucune soudure requise)
Bibliothèques C/C++ et MicroPython
Schématique
Inclus
1x Inky Frame 4.0' (avec Pico W)
2x pieds en métal
Téléchargements
MicroPython
(Apprendre) Premiers pas avec Inky Frame
(Lisezmoi) Installation de MicroPython
(Lisezmoi) FAQ MicroPython (et dépannage)
Téléchargez la marque pirate MicroPython (vous aurez besoin du Inky Frame.uf2)
Exemples MicroPython
Référence de la fonction PicoGraphics
C/C++
Exemples en C
Référence de la fonction picographique
YDLIDAR X4PRO est un télémètre bidimensionnel à 360 degrés. Basé sur le principe de la triangulation, il est équipé d'une optique, d'une électronique et d'une conception algorithmique associées pour atteindre une mesure de distance haute fréquence et haute précision. La structure mécanique tourne à 360 degrés pour produire en continu les informations d'angle ainsi que les données du nuage de points de l'environnement balayé tout en mesurant les distances.
Caractéristiques
Mesure de distance de balayage omnidirectionnel à 360 degrés
Erreur de distance réduite, performances stables et grande précision
Large plage de mesure
Grande résistance aux interférences lumineuses ambiantes
Consommation d'énergie réduite, petite taille et longue durée de vie
Puissance laser conforme aux normes de sécurité laser de Classe I
Vitesse du moteur réglable, fréquence de balayage de 6 à 12 Hz
Mesure de distance rapide, fréquence de mesure allant jusqu'à 5 kHz
Applications
Navigation et évitement d'obstacles pour les robots
Enseignement et recherche ROS pour les robots
Sécurité régionale
Numérisation de l'environnement et reconstruction 3D
Navigation et évitement d'obstacles pour les robots aspirateurs/robots d'apprentissage ROS
Spécifications
Fréquence de mesure
5000 Hz
Fréquence de balayage
6-12 Hz
Distance de mesure
0,12 à 10 m
Angle de balayage
360°
Résolution d'angle
0,43-0,85°
Dimensions
110,6 x 71,1 x 52,3 mm
Téléchargements
Fiche technique
Manuel de l'utilisateur
Manuel de développement
SDK
Outil
ROS
Ce FeatherWing facilite l'ajout d'un enregistrement de données à n'importe quelle carte Feather que vous possédez. Vous obtenez à la fois une horloge en temps réel I²C (PCF8523) avec cristal de 32 KHz et batterie de secours, ainsi qu'une prise microSD qui se connecte aux broches du port SPI (+ broche supplémentaire pour CS).
Remarque : FeatherWing n'est pas livré avec une carte microSD.
Une pile bouton CR1220 est requise pour utiliser les capacités de secours de la batterie RTC. Si vous n'utilisez pas la partie RTC du FeatherWing, aucune batterie n'est requise.
Pour communiquer avec le support de la carte microSD , la bibliothèque SD standard de Worduino est recommandée. Un peu de soudure est nécessaire pour fixer les en-têtes à l'aile.
Brochages
Broches d'alimentation
Sur la rangée du bas, les broches 3,3 V (deuxième à gauche) et GND (quatrième à gauche) sont utilisées pour alimenter la carte SD et le RTC (pour soulager la pile bouton lorsque l'alimentation secteur est disponible)
Broches RTC et I²C
Dans le coin supérieur droit, SDA (à l'extrême droite) et SCL (à gauche de SDA) sont utilisés pour communiquer avec la puce RTC.
SCL - Broche d'horloge I²C à connecter à la ligne d'horloge I 2 C de votre microcontrôleur. Cette broche a une résistance pull-up de 10 kΩ à 3,3 V
SDA - Broche de données I²C à connecter à la ligne de données I 2 C de votre microcontrôleur. Cette broche a une résistance pull-up de 10 kΩ à 3,3 V
Il existe également une dérivation pour INT , la broche de sortie du RTC. Il peut être utilisé comme sortie d'interruption ou pour générer une onde carrée. Notez que cette broche est un drain ouvert - vous devez activer le pull-up interne sur la broche numérique à laquelle elle est connectée.
Broches SD et SPI
en partant de la gauche vous avez
SPI Clock (SCK) - sortie du ressort à l'aile
SPI Master Out Slave In (MOSI) - sortie du ressort à l'aile
SPI Master In Slave Out (MISO) - entrée aile vers ressort
Ces épingles sont au même endroit sur chaque plume. Ils servent à la communication avec la carte SD. Lorsque la carte SD n'est pas insérée, ces broches sont totalement libres. MISO devient tri-état lorsque la broche SD CS (sélection de puce) est tirée vers le haut
Cette carte support combine un écran TFT 2.4', six DEL adressables, un régulateur de tension intégré, un connecteur IO à 6 broches et une fente microSD avec la fente de connecteur M.2 broches afin qu’elle puisse être utilisée avec les cartes de processeur compatibles dans notre écosystème MicroMod. Nous avons également installé sur cette carte porteuse l’ATtiny84 d’Atmel avec 8Ko de flash programmable. Ce petit gars est préprogrammé pour communiquer avec le processeur sur I2C pour lire les boutons pressés. Caractéristiques : Connecteur MicroMod M.2 240 x 320 pixels, écran TFT 2,4' 6 DEL APA102 adressables Buzzer magnétique Connecteur USB-C Régulateur de tension 3,3 V 1 A Connecteur Qwiic Boutons de démarrage/réinitialisation Circuit de batterie et de charge de secours du CCF microSD Phillips #0 M2.5 x 3 mm vis incluse
Cette station météo Wi-Fi portable allie parfaitement fonctionnalité et style, offrant des mises à jour en temps réel de la température, de l'humidité et de l'heure, d'un seul coup d'œil.
Dotée d'un écran numérique clair, la station garantit une lecture et une compréhension faciles des données météorologiques et horaires. Son design minimaliste s'intègre parfaitement à tout environnement, ajoutant une touche de sophistication moderne sans attirer l'attention.
Caractéristiques
Affichage multifonction : affiche la météo, la pression atmosphérique, les températures minimales et maximales, la vitesse du vent, la ville, le pays/la région, la date, le jour de la semaine, la température extérieure et Humidité – tout en un coup d'œil.
Animations GIF personnalisées : Téléchargez vos propres GIF pour une expérience d'affichage personnalisée.
Connectivité Wi-Fi : Se connecte automatiquement à Internet pour récupérer les données météorologiques et horaires en temps réel.
Alimentation USB-C
Boîtier en plastique résistant
Dimensions : 45 x 35 x 40 mm
Caractéristiques
Plug & Play (aucun pilote requis), compatible avec Windows 10/8/7, Mac, Linux et Android prenant en charge OTG.
Dispositif de prise de voix, prise de voix en champ lointain jusqu'à 5 m et prend en charge un modèle de prise de vue à 360°
Algorithmes acoustiques implémentés :
DOA(Direction d'Arrivée),
AEC (annulation automatique de l'écho),
AGC (contrôle automatique du gain),
NS (suppression du bruit)
Prise audio intégrée, qui permet de brancher des écouteurs ou des haut-parleurs (haut-parleur non inclus)
Applications
Dispositif de prise de voix
Appareil domotique/bureautique
Assistant vocal en voiture
Appareil de santé
Robot d'interaction vocale
Autres applications
Spécifications techniques
XVF-3000 de XMOS
4 microphones numériques haute performance
Prend en charge la capture vocale en champ lointain
Algorithmes vocaux sur puce
12 indicateurs LED RVB programmables
Micros : MEMS MSM261D4030H1CPM
Sensibilité : -26 dBFS (omnidirectionnel)
Point de surcharge acoustique : 120 dB SPL
RSB : 63 dB
Alimentation : 5 V CC à partir d'un micro USB ou d'un connecteur d'extension
Dimensions : 77 mm (diamètre) Prise de sortie jack audio 3,5 mm
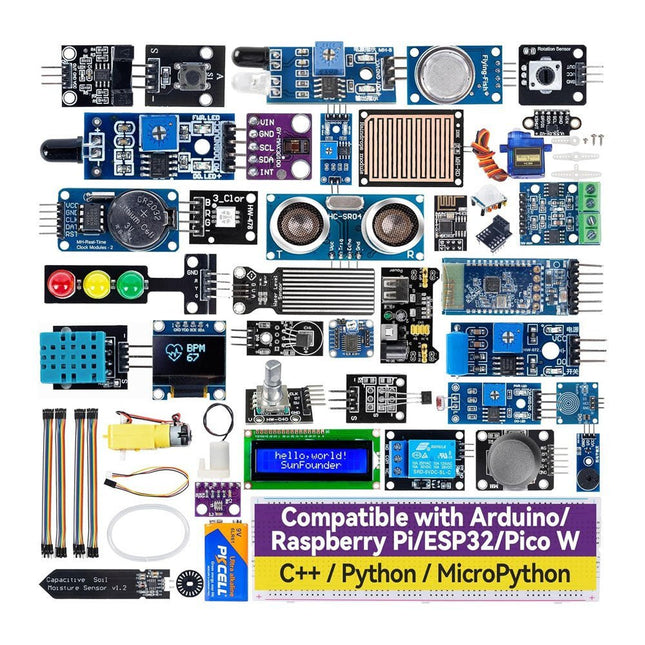
Découvrez une créativité sans limite avec le kit de capteurs universels, conçu pour Raspberry Pi, Pico W, Arduino et ESP32. Ce kit polyvalent est compatible avec les plateformes de développement les plus populaires, notamment Arduino Uno R4 Minima/WiFi, Uno R3, Mega 2560, Raspberry Pi 5, 4, 3B+, 3B, Zero, Pico W et ESP32.
Avec plus de 35 capteurs, actionneurs et écrans, il est idéal pour des projets allant de la surveillance environnementale et de la domotique à la robotique et aux jeux interactifs. Des tutoriels pas à pas en C/C++, Python et MicroPython guident les créateurs débutants comme expérimentés à travers 169 projets passionnants.
Caractéristiques
Large compatibilité : Prise en charge complète d'Arduino (Uno R3, Uno R4 Minima/WiFi, Mega 2560), Raspberry Pi (5, 4, 3B+, 3B, Zero, Pico W) et ESP32, offrant une grande flexibilité sur de nombreuses plateformes de développement. Instructions pour la construction de 169 projets incluses.
Composants complets : Plus de 35 capteurs, actionneurs et modules d'affichage adaptés à divers projets tels que la surveillance environnementale, la domotique, la robotique et les contrôleurs de jeux interactifs.
Tutoriels détaillés : Des tutoriels clairs et détaillés couvrent Arduino, Raspberry Pi, Pico W, ESP32 et chaque composant inclus. Des tutoriels sont disponibles en C/C++, Python et MicroPython, s'adressant aussi bien aux débutants qu'aux créateurs expérimentés.
Adapté à tous les niveaux : Propose des projets structurés conçus pour guider les utilisateurs de manière fluide, du niveau débutant au niveau avancé en électronique et en programmation, améliorant ainsi leur créativité et leur expertise technique.
Inclus
Plaque d'expérimentation
Module bouton
Module capacitif d'humidité du sol
Module capteur de flamme
Module capteur de gaz/fumée (MQ2)
Gyroscope et Module accéléromètre (MPU6050)
Module capteur à effet Hall
Module capteur de vitesse infrarouge
Module capteur d'évitement d'obstacles IR
Module joystick
Module convertisseur ADC/DAC PCF8591
Module photorésistance
Module de mouvement PIR (HC-SR501)
Module potentiomètre
Module oxymètre de pouls et capteur de fréquence cardiaque (MAX30102)
Module de détection de gouttes de pluie
Module horloge temps réel (DS1302)
Module codeur rotatif
Module capteur de température (DS18B20)
Module capteur de température et d'humidité (DHT11)
Température, humidité et Capteur de pression (BMP280)
Capteur de distance Micro-LIDAR à temps de vol (VL53L0X)
Module de capteur tactile
Module de capteur à ultrasons (HC-SR04)
Module de capteur de vibrations (SW-420)
Module de capteur de niveau d'eau
I²C LCD 1602
Module d'affichage OLED (SSD1306)
Module LED RVB
Module de feux de signalisation
Module relais 5 V
Pompe centrifuge
Module de commande de moteur L9110
Module d'avertisseur passif
Servomoteur (SG90)
TT Moteur
Module ESP8266
Module Bluetooth JDY-31
Module d'alimentation
Documentation
Tutoriel en ligne
L'écran tactile capacitif haute résolution Waveshare de 10,1 pouces est un écran tactile universel avec une résolution de 1920 x 1200, compatible avec la plupart des appareils HDMI standard. Il présente un design fin et léger, un couvercle en verre trempé rigide pour plus de durabilité, d'excellentes performances d'affichage et une expérience multi-touch fluide. De plus, la plaque arrière en métal intégrée assure la stabilité, permettant aux utilisateurs d'intégrer plus facilement l'écran dans des projets tout-en-un.
Caractéristiques
Écran IPS de 10,1 pouces avec 1920 x 1200 pixels
Tactile capacitif à 10 points avec panneau en verre trempé offrant une dureté jusqu'à 6H
Technologie de panneau entièrement laminé pour un meilleur effet d'affichage
Lorsqu'il est utilisé avec Raspberry Pi, il prend en charge Raspberry Pi OS, Ubuntu, Kali et RetroPie
En tant qu'écran d'ordinateur, il prend en charge Windows 7 et versions ultérieures.
Menu OSD (peut être utilisé pour le contrôle de l'alimentation, le réglage de la luminosité/du volume/de la rotation de l'image, etc.)
Sortie audio HDMI, prise casque 3,5 mm intégrée et haut-parleurs à 4 broches de haute qualité
Spécifications
Écran
IPS 10,1 pouces
Angle de vision
178°
Résolution
1920 x 1200 pixels
Zone de l'écran tactile
217,2 x 135,6 mm
Dimensions
239 x 147 mm
Gamme de couleurs
65% NTSC
Luminosité maximale
300 cd/m²
Contraste
1000:1
Réglage du rétroéclairage
Gradation des boutons
Taux de rafraîchissement
60 Hz
Interface d'affichage
HDMI standard
Alimentation
5 V (USB-C)
Consommation électrique maximale
6 W
Inclus
1x Écran tactile capacitif haute résolution de 10,1 pouces (10.1EP-CAPLCD)
1x Câble plat HDMI (1 m)
1x Câble USB-A vers USB-C (1 m)
1x Adaptateur micro HDMI
1x Adaptateur HDMI
1x Adaptateur HDMI vers micro HDMI
1x Câble PH1.25 à 4 broches vers type A
1x Stylet tactile capacitif
1x Câble à 3 broches
1x Câble HDMI 120 mm (2 pièces)
1x Chiffon de nettoyage
1x Alimentation électrique 5 V/3 A (UE)
1x Pack de vis
Téléchargements
Wiki
La carte FPGA iCEBreaker est une carte de développement FPGA éducative open source.
L'iCEBreaker est idéal pour les cours et les ateliers enseignant l'utilisation du flux de conception FPGA open source via Yosys , nextpnr , IceStorm , Icarus Verilog , Amaranth HDL et autres. Cela signifie que le tableau est peu coûteux et dispose d’un ensemble de fonctionnalités intéressantes pour permettre la conception de cours et d’exercices d’atelier intéressants. En même temps, cela permet à l'utilisateur d'utiliser les outils propriétaires du fournisseur s'il le souhaite.
Après l'atelier, les cartes peuvent être facilement utilisées comme carte de développement car la plupart des GPIO sont exposés, décomposés et configurables via des cavaliers à l'arrière de la carte. Il n'y a qu'un nombre minimal de boutons et de LED qui ne peuvent pas être déconnectés et utilisés à vos propres fins.
Documentation
Atelier
Le Sparkfun Qwiic GPIO est un appareil I²C basé sur le TCA9534 I/O Expander IC de Texas Instruments. La carte ajoute huit broches IO que vous pouvez lire et écrire comme n’importe quelle autre broche numérique sur votre contrôleur. Les détails de l’interface I²C ont été pris en compte dans une bibliothèque Arduino afin que vous puissiez appeler des fonctions similaires à pinMode et digitalWrite d’Arduino, vous permettant de vous concentrer sur votre création ! Les broches du TCA9534 sont des bornes de verrouillage faciles à utiliser; ne jamais visser un autre fil à cette place! Les bornes sont relativement spacieuses elles-mêmes, alors n’hésitez pas à fixer plusieurs fils dans une borne de terre ou d’alimentation. Avec trois cavaliers d’adresse personnalisables, vous pouvez avoir jusqu’à huit cartes GPIO Qwiic connectées sur un seul bus permettant jusqu’à 64 broches GPIO supplémentaires ! L’I²C par défaut est 0x27 et peut être modifié en ajustant les cavaliers sur le dos de la carte. Caractéristiques : Huit broches GPIO configurables disponibles Adresse I2C : 0x27 (par défaut) Les broches d’adresse permettent d’utiliser jusqu’à huit cartes sur un seul bus Registre d’inversion de polarité d’entrée Contrôler chaque broche d’E/S individuellement ou en même temps Sortie Open-Drain Active-Low Interrupt Output 2 x connecteurs Qwiic Dimensions : 60,96 mm x 38,10 mm
La LILYGO T-Display-S3 Long est une carte de développement polyvalente alimentée par le microprocesseur LX7 double cœur ESP32-S3R8. Il est doté d'un écran LCD TFT tactile capacitif de 3,4 pouces avec une résolution de 180 x 640 pixels, offrant une interface réactive pour diverses applications.
Cette carte est idéale pour les développeurs recherchant une solution compacte mais puissante pour les projets nécessitant une saisie tactile et une communication sans fil. Sa compatibilité avec les environnements de programmation populaires garantit une expérience de développement fluide.
Spécifications
MCU
Microprocesseur LX7 double cœur ESP32-S3R8
Connectivité sans fil
Wi-Fi 802.11, BLE 5 + BT Mesh
Plateforme de programmation
IDE Arduino, VS Code
Flash
16 Mo
PSRAM
8 Mo
Détection de tension de chauve-souris
IO02
Fonctions intégrées
Bouton de démarrage + réinitialisation, interrupteur de batterie
Afficher
LCD TFT tactile capacitif de 3,4 pouces
Profondeur de couleur
565, 666
Résolution
180 x 640 (RVB)
Alimentation fonctionnelle
3,3 V
Interface
QSPI
Inclus
1x T-Display S3 Long
1x Câble d'alimentation
2x Câbles d'interface STEMMA QT/Qwiic (P352)
1x Broche femelle (double rangée)
Téléchargements
GitHub
Le SparkFun Power Delivery Board utilise un contrôleur autonome pour négocier avec les adaptateurs d’alimentation et passer à une tension supérieure autre que 5V. Il utilise le même adaptateur d’alimentation pour différents projets plutôt que de compter sur plusieurs adaptateurs d’alimentation pour fournir une sortie différente; il peut fournir la carte dans le cadre du système de connexion Qwiic de SparkFun, de sorte que vous n’aurez pas à faire de soudure pour comprendre comment les choses sont orientées. Le SparkFun Power Delivery Board tire parti de la norme de distribution d’alimentation à l’aide d’un contrôleur autonome de STMicroelectronics, le STUSB4500. Le STUSB4500 est un contrôleur de distribution d’alimentation USB qui traite les appareils récepteur de données. Il met en œuvre un algorithme propriétaire pour négocier un contrat de distribution d’électricité avec une source (c.-à-d. une prise murale de distribution d’électricité ou un adaptateur d’alimentation) sans avoir besoin d’un microcontrôleur externe. Cependant, vous aurez besoin d’un microcontrôleur pour configurer la carte. Les profils PDO sont configurés dans une mémoire non volatile intégrée. Le contrôleur fait tout le poids de la négociation de puissance et fournit un moyen facile de configurer sur I2C. Pour configurer la carte, vous aurez besoin d’un bus I2C. Le système Qwiic facilite la connexion de la carte d’alimentation à un microcontrôleur. Selon votre application, vous pouvez également vous connecter au bus I2C via les trous SDA et SCL. Caractéristiques : Plage de tension d’entrée et de sortie de 5-20V Courant de sortie jusqu’à 5A Trois profils d’alimentation configurables Commande automatique de l’évier Type-C™ et USB PD Certifié USB Type-C™ rév. 1.2 et USB PD rév. 2.0 (TID n° 1000133) Surveillance intégrée de la tension VBUS Pilotes de porte de commutation VBUS intégrés (PMOS)'
LuckFox Pico Mini est une micro-carte de développement Linux compacte basée sur la puce Rockchip RV1103, offrant une plate-forme de développement simple et efficace pour les développeurs. Il prend en charge une variété d'interfaces, notamment MIPI CSI, GPIO, UART, SPI, I²C, USB, etc., ce qui est pratique pour un développement et un débogage rapides.
Caractéristiques
Cœur ARM Cortex-A7 monocœur 32 bits avec NEON et FPU intégrés
Le NPU de 4e génération intégré, développé par Rockchip, offre une précision de calcul élevée et prend en charge la quantification hybride int, int8 et int16. La puissance de calcul d'int8 est de 0,5 TOPS, et jusqu'à 1,0 TOPS avec int4
ISP3.2 de troisième génération intégré et auto-développé, prend en charge 4 mégapixels, avec plusieurs algorithmes d'amélioration et de correction d'image tels que HDR, WDR, réduction du bruit à plusieurs niveaux, etc.
Offre de puissantes performances d'encodage, prend en charge le mode d'encodage intelligent et l'économie de flux adaptative en fonction de la scène, permet d'économiser plus de 50% du débit binaire du mode CBR conventionnel afin que les images de la caméra soient en haute définition avec une taille plus petite, et doublent le stockage. espace
Le microcontrôleur RISC-V intégré prend en charge une faible consommation d'énergie et un démarrage rapide, prend en charge une capture d'image rapide de 250 ms et charge simultanément la bibliothèque de modèles AI pour réaliser la reconnaissance faciale "en une seconde"
DRAM DDR2 16 bits intégrée, capable de supporter des bandes passantes mémoire exigeantes
Intégré avec POR intégré, codec audio et MAC PHY
Spécifications
Processeur
ARM Cortex-A7, processeur monocœur 32 bits, 1,2 GHz, avec NEON et FPU
NPU
NPU Rockchip 4e génération, prend en charge int4, int8, int16 ; jusqu'à 1.0 TOPS (int4)
ISP
ISP3.2 de troisième génération, entrée jusqu'à 4 MP à 30 ips, HDR, WDR, réduction du bruit
RAM
64 Mo DDR2
Stockage
Flash SPI NAND de 128 Mo
USB
Hôte/périphérique USB 2.0 via Type-C
Interface de la caméra
MIPI CSI 2 voies
Broches GPIO
17 broches GPIO
Consommation électrique
MCU RISC-V à faible consommation pour un démarrage rapide
Dimensions
28 x 21 mm
Téléchargements
Wiki
Après la mise sous tension, le YDLIDAR G4 commence à tourner et à scanner l'environnement environnant. La distance de numérisation est de 16 m et l'appareil a une vitesse de numérisation de 9 000 fois par seconde.
Il analyse minutieusement son environnement et peut y détecter les plus petits objets. Grâce à son moteur sans balais extrêmement précis et à son disque codeur montés sur roulements, il fonctionne très bien et a une durée de vie allant jusqu'à 500 000 heures de fonctionnement.
Le G4 est une solution peu coûteuse pour les projets nécessitant une détection d'obstacles, un évitement d'obstacles et/ou une localisation et une cartographie simultanées (SLAM). Tous les produits YDLIDAR sont prêts pour ROS.
Caractéristiques
Scanner 2D à 360 degrés
Performances stables, haute précision
Portée de 16 m Forte protection contre les interférences de la lumière ambiante
Entraînement par moteur sans balais, performances stables
Norme de sécurité laser FDA Classe I
Balayage omnidirectionnel à 360 degrés, fréquence de balayage adaptative de 5 à 12 Hz
Technologie optomagnétique
Communication de données sans fil
Vitesse de numérisation de 9 000 Hz
Documentation
Lecteur ROS
Page de téléchargement d'Ydlidar
Dans la section « Téléchargements » ci-dessous, vous trouverez la fiche technique ainsi que les manuels d'utilisation et de développement.
Le lecteur/capteur d'empreintes digitales capacitif Grove est basé sur le module de reconnaissance d'empreintes digitales KCT203 Semiconductor, comprenant un microcontroleur performant, un capteur d'empreintes digitales poussoir RF vertical et un dispositif de détection tactile. Ce module présente de nombreux avantages tels que la petite taille, le modèle d'empreinte digitale, la faible consommation d'énergie, la haute fiabilité, la reconnaissance rapide des empreintes digitales, etc. En outre, il convient de mentionner qu'il y a une belle lumière RGB autour de ce module pour indiquer si la reconnaissance des empreintes digitales est réussie. Le système est équipé d'un algorithme d'empreintes digitales très performant, et la fonction d'auto-apprentissage est remarquable. Après chaque reconnaissance d'empreintes digitales réussie, les dernières valeurs de caractéristiques de défi peuvent être intégrées dans la base de données d'empreintes digitales pour améliorer continuellement les caractéristiques des empreintes digitales, ce qui rend l'expérience meilleure. Applications Dispositifs de verrouillage par empreinte digitale : serrures de porte, coffres-forts, antivols de volant, cadenas, antivols pour armes à feu, etc. Signature par empreinte digitale, système de contrôle d'accès Spécifications CPU GD32 Mémorisation des modèles d'empreintes digitales Max. 100 Connecteur Grove UART Résolution du capteur 508 DPI Pixel du capteur 160 x 160 Taux de faux rejets Taux de fausses acceptations Temps de réponse de la correspondance (mode 1:N) Temps de réponse de la correspondance (mode 1:1) Taille du capteur Φ 14,9 mm Taille du cadre Φ 19 mm Consommation d'énergie Vitesse maximale : ≤40 mA ; veille : ≤ 12 uA Tension de fonctionnement 3,3 V / 5 V Température de fonctionnement -20 ~ 70 ℃ Protection ESD Non-contact 15 KV, contact 8 KV Inclus 1 x Module de reconnaissance d'empreintes digitales à semi-conducteurs KCT203 1 x Câble du capteur 1 x Câble Grove 1x Carte pilote Grove Documentations Fichier eagle du lecteur/capteur d'empreintes digitales capacitif Grove Programme pour le lecteur/capteur d'empreintes digitales capacitif Wiki
Le capteur SDS011 détermine la concentration de particules de poussière dans l'air à l'aide de la méthode de la lumière diffusée.
L'adaptateur USB-UART permet également de lire le capteur directement via le port USB d'un ordinateur.
Caractéristiques
Interface
UART (niveau 3,3 V)
Résolution
0,3 µg/m3
Temps de réponse
<10s
Autres caractéristiques
Ventilateur intégré
Courant au ralenti
<4mA
Courant d'alimentation
70mA
Tension de fonctionnement
5 V
Dimensions
70x70x24mm
Poids
70g
Inclus
1x capteur de poussière SDS011 1x câble de connexion
1x adaptateur USB-UART
Téléchargements
Fiche de données
Manuel
Le YDLIDAR T-mini Pro est un LiDAR 2D à 360 degrés basé sur le principe du ToF. Il est équipé d'une optique, d'une alimentation électrique et d'une conception algorithmique associées pour permettre une mesure de distance laser de haute précision. Pendant la mesure de la distance, la structure mécanique effectue une rotation à 360 degrés pour obtenir en continu des informations d'angle, permettant ainsi une mesure de distance à balayage à 360 degrés et la sortie de données en nuage de points de l'environnement balayé.
Caractéristiques
Il adopte le principe mature de détection ToF, il peut être facilement intégré dans l'ensemble du dispositif avec une petite taille, offrant au robot un environnement bidimensionnel à 360 degrés avec une grande stabilité et une grande précision.
Fréquence de balayage auto-adaptative de 6 à 12 Hz, la vitesse peut être ajustée indépendamment en fonction des besoins fonctionnels. La structure mécanique effectue une rotation à 360 degrés, obtient en continu des informations d'angle, effectue un balayage et une mesure dans toutes les directions, et produit un nuage de points.
Aspect plus petit et consommation d'énergie réduite, ce qui permet d'optimiser considérablement la structure spatiale des produits d'application et les rend adaptés à davantage de scénarios.
Le moteur sans balais fonctionne efficacement et a une durée de vie plus longue de 10 000 heures.
Spécifications
Distance de plage : 0,02 à 12 m
Fréquence de plage : 4000 Hz
Résolution angulaire : 0,54 degrés
Fréquence de balayage : 6 à 12 Hz
Angle de balayage : 360 degrés
Interface : UART
Applications
Navigation et évitement d'obstacles pour les robots
Enseignement et recherche sur les robots ROS
Sécurité régionale
Scannage environnemental et reconstruction 3D
Navigation et évitement d'obstacles pour les robots de service à domicile / aspirateurs robots
Téléchargements
Datasheet
User Manual
Development Manual
SDK
Tool
ROS
La carte Motorino est une carte d'extension permettant de contrôler et d'utiliser jusqu'à 16 servomoteurs 5 V contrôlés par PWM.
Le générateur d'horloge inclus fournit un signal PWM très précis et un positionnement très précis. La carte dispose de 2 entrées pour une tension de 4,8 V à 6 V qui peuvent être utilisées pour un maximum de 11 A. Avec cette entrée, une alimentation électrique parfaite est toujours garantie et même les projets les plus importants ne posent aucun problème.
L'alimentation électrique passe directement par le Motorino, qui fournit une connexion pour la tension, la terre et le contrôle.
Le condensateur intégré tamponne la tension, ce qui évite une chute soudaine de tension en cas de charge élevée. Mais il existe également la possibilité de connecter un autre condensateur.
Le contrôle et la programmation peuvent être effectués, comme d'habitude, avec l'Arduino. Les manuels et les exemples de code permettent une introduction rapide pour les débutants.
Fonctionnalités spéciales
16 canaux, propre générateur d'horloge
Entrée 1
Connecteur d'alimentation coaxial 5,5 / 2,1 mm, 4,8-6 V / 5 A max
Entrée 2
Bornier à vis, 4,8-6 V / 6 A max
Communication
16xPWM
Compatible avec
Microcontrôleur Arduino Uno, Mega et peut-être plus avec brochage compatible Arduino
Dimensions
69x24x56mm
Portée
Carton, manuel, emballage de vente au détail
Caractéristiques
Taille
23,2 x 12,5 x 22 mm
Poids
9g
Type d'engrenage
Équipement en plastique (Nylon et POM)
Angle limite
120
Palier Pas de roulements à billes
Cannelure d'engrenage de klaxon
20T (4,8 mm)
Type de klaxon
Plastique, POM
Cas
Nylon et fibre de verre
Fil de connecteur
200mm
Moteur
Moteur à balais métalliques
Résistance à l'eau
Non
Inclus
1x servomoteur FeeTech FS90
1x klaxon de servo droit à une extrémité
1x klaxon de servo droit à double extrémité
1x klaxon de servo droit à double extrémité ailé
1x klaxon de servo étoile à quatre branches
1x klaxon de servo rond
1x vis de klaxon de servo
2x vis de montage du servo FS90
Téléchargements
Mode d'emploi
Ce kit contient tout le nécessaire pour commencer à apprendre à connecter l'électronique au micro:bit de manière accessible et simple. Tout est connecté à l'aide des pinces crocodiles fournies, donc aucune soudure n'est nécessaire. Inclus
MonkMakes Haut-parleur pour micro:bit
MonkMakes Switch pour micro:bit
Carte de capteur MonkMakes pour micro:bit
Jeu de cordons à pince crocodile (10 cordons)
Petit moteur avec ventilateur
Boîtier à pile AA unique (pile non incluse)
Ampoule et support
Livret (A5)
Téléchargements
Instructions
Fiche de données
Plans de cours
Ce kit est basé sur ESP32 et LoRa. L'écran ESP32 3,5' est la console du système, il reçoit le message LoRa des capteurs d'humidité LoRa (prend en charge jusqu'à 8 capteurs dans le firmware par défaut) et envoie des commandes de contrôle au MOSFET LoRa à 4 canaux (2 MOSFET à 4 canaux pris en charge , avec un total de 8 canaux), pour contrôler l'ouverture/fermeture des vannes connectées, et ainsi contrôler l'irrigation de plusieurs points.
Caractéristiques
Prêt à l'emploi : les micrologiciels sont préprogrammés pour tous les modules avant l'expédition, l'utilisateur peut uniquement les mettre sous tension, définir l'ID de la console et commencer à l'utiliser. Convient à aucun programmeur, en 3 minutes pour créer une application déposée.
Avec connexion sans fil Lora : la portée du moniteur et du contrôle peut aller jusqu'à quelques kilomètres, adaptée au jardin/petite ferme.
Capteur d'humidité du sol avec une bonne résistance à la corrosion , peut être utilisé au moins six mois avec 2 piles AAA.
Facile à installer : comparé à une solution bon marché avec des fils, qui est difficile à mettre en œuvre dans une application de fichiers, les fils de connexion ne sont pas nécessaires, l'ensemble de l'installation est propre et facile ; Les vannes peuvent être facilement connectées au Lora MOSFET.
Matériel et logiciels ouverts : pour étudier Lora et FreeRTOS. La console d'affichage ESP32/le capteur d'humidité du sol Lora/LoRa MOSFE sont tous programmés avec Arduino. Pour les programmeurs/ingénieurs, peut développer d’autres applications plus spécialisées.
Basée sur ESP32, avec connexion WiFi, la console peut également accéder à Internet, créer beaucoup plus d'applications, notamment la mise à jour des données d'humidité sur Internet pour un moniteur à distance et le contrôle à distance avec MQTT.
Inclus
1x écran ESP32 3,5' (sans caméra)
1x extension Lora pour écran ESP32
2x capteur d'humidité Lora
1x MOSFET Lora à 4 canaux
1x alimentation 12V
Conduite d'eau (5m)
1x joint de tuyau à 1 entrée et 4 sorties
Téléchargements
Instructable : Surveillance des sols et irrigation avec LoRa
GitHub
Un écran IdO de 2,7 pouces à faible consommation et à source ouverte, alimenté par un module ESP32-S2 et doté de la technologie Memory-in-Pixel (MiP) de SHARP. Le Newt est un écran mural alimenté par piles, toujours allumé, qui peut aller en ligne pour récupérer la météo, les calendriers, les résultats sportifs, les listes de choses à faire, les citations... vraiment tout ce qui se trouve sur Internet ! Il utilise un microcontrôleur ESP32-S2 que vous pouvez programmer avec Arduino, CircuitPython, MicroPython ou ESP-IDF. Il est parfait pour les makers : La technologie Memory-in-Pixel (MiP, mémoire dans les pixels) de Sharp évite les temps de rafraîchissement lents associés aux écrans E-Ink. Une horloge en temps réel a été ajoutée pour prendre en charge les minuteries et les alarmes. Le Newt a été conçu en tenant compte du fonctionnement sur batterie ; chaque composant a été choisi pour sa capacité à fonctionner à faible puissance. Le Newt a été conçu pour fonctionner « sans fil », ce qui signifie qu'il peut être installé dans des endroits où un cordon d'alimentation ne serait pas pratique, par exemple un mur, un réfrigérateur, un miroir ou un tableau effaçable à sec. Avec le support optionnel, les bureaux, les étagères et les tables de nuit sont également de bonnes options. Il est open source, et tous les fichiers et bibliothèques de conception sont disponibles pour examen, utilisation et modification. Toutefois, cela n'est pas obligatoire. Chacun est livré avec un logiciel fonctionnel comportant les fonctions suivantes : Détails de la météo actuelle Prévisions météorologiques horaires et quotidiennes Alarme Minuteur Citations inspirantes Prévision de la qualité de l’air Calendrier des habitudes Minuteur Pomodoro Carte de stratégie oblique Pour l’utiliser, il suffit de suivre les instructions pour le connecter au Wi-Fi. Aucun téléchargement d'application n'est nécessaire. Spécifications Affichage LCD à mémoire vive Taille de l’écran 2,7 pouces Résolution 240 x 400 Courant de veille 30 μA Taux de rafraichissement Rafraîchissement périodique de l'écran requis Non Boutons d’entrée 10 boutons capacitifs, 1 bouton-poussoir RTC inclus Oui Haut-parleurs inclus Oui Entrée d’alimentation USB Type-C Batterie incluse Non Languages de programmation Arduino, CircuitPython, ESP IDF, MicroPython Dimensions 91 x 61 x 9 mm Microcontrôleur Module expressif ESP32-S2-WROVER avec 4 Mo de flash et 2 Mo de PSRAM Compatible Wi-Fi Supporte Arduino, MicroPython, CircuitPython, et ESP-IDF Courant de veille profonde aussi faible que 25 μA Affichage Mémoire en pixels LCD 2,7 pouces, 240 x 400 pixels Capable de fournir un contenu à haut contraste, haute résolution et faible latence avec une consommation d’énergie ultra-faible Le mode réfléchissant exploite la lumière ambiante pour éliminer le besoin d’un rétroéclairage Chronométrage, minuteries et alarmes Horloge temps reel (RTC) Micro Crystal RV-3028-C7 Optimisé pour une consommation extrêmement faible (45 μA) Capable de gérer simultanément une minuterie périodique, un compte à rebours et une alarme Interruption matérielle pour les minuteries et les alarmes 43 octets de mémoire utilisateur non volatile, 2 octets de RAM utilisateur Compteur de temps UNIX séparé Audio Haut-parleur/ronfleur avec mini amplificateur classe D sur la sortie A0 du CNA, pouvant jouer des tonalités ou des clips audio lo-fi. Entrée utilisateur Interrupteur d’alimentation Deux boutons tactiles programmables pour réinitialiser et démarrer 10 pavés tactiles capacitifs Alimentation Newt est conçu pour fonctionner pendant un à deux mois entre les charges en utilisant une batterie lipo de 500 mAh. Cette durée varie (une utilisation intensive du Wi-Fi, en particulier, déchargera plus rapidement la batterie). Connecteur USB de type C pour la programmation, l'alimentation et la charge Régulateur de tension à mode de fonctionnement vert (TOREX XC6220) qui peut sortir 1 A de courant et fonctionner à partir de 8 μA Connecteur JST pour une batterie Lithium-Ion Chargeur de batterie (MCP73831) Indicateur de batterie faible (courant de repos de 1 μA) Logiciel Le matériel Newt est compatible avec les bibliothèques open source Arduino pour ESP32-S2, Adafruit GFX (polices de caractères), Adafruit Sharp Memory Display, et RTC RV-3028-C7 (RTC) Les bibliothèques Arduino et les exemples de programmation sont disponibles dans le dépôt GitHub du fabricant Les bibliothèques CircuitPython et l'enregistrement sont sur la feuille de route, incluant une bibliothèque CircuitPython pour l'horloge en temps réel RV-3028 Inclus dans le colis Phambili Newt – entièrement assemblé avec firmware préchargé Support de bureau découpé au laser Pieds à mini-aimant La visserie nécessaire Support et documentation Instructions complètes d’utilisation (En anglais) GitHub: bibliothèque et base de code Arduino (En anglais) GitHub: schémas de la carte (En anglais) Vidéos de prototypes ou de démonstrations (build tracked on Hackaday. En anglais)
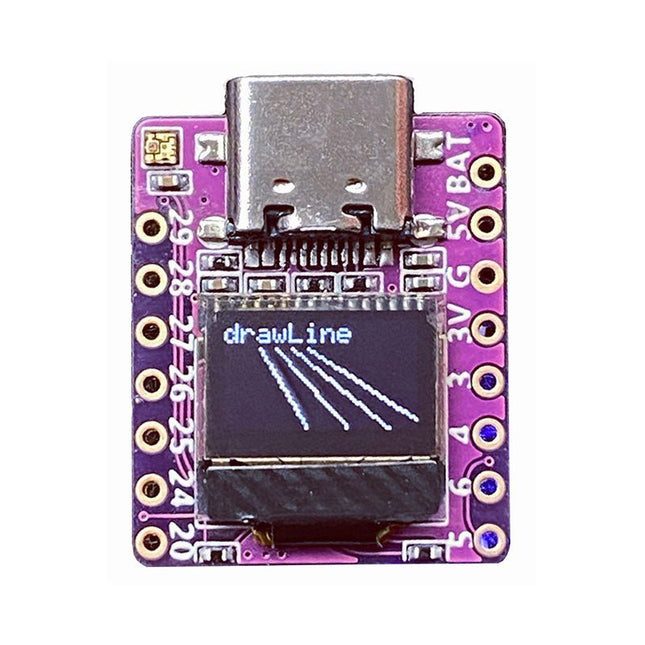
Carte de développement compacte compatible Arduino, MicroPython et CircuitPython alimentée par Raspberry Pi RP2040
RP2040-0.42LCD est une carte de développement hautes performances avec écran LCD intégré de 0,42' (résolution 70x40) avec interfaces numériques flexibles.
Il intègre la puce du microcontrôleur RP2040 du Raspberry Pi. Le RP2040 est doté d'un processeur Arm Cortex-M0+ double cœur cadencé à 133 MHz avec 264 Ko de SRAM interne et 2 Mo de stockage flash.
Caractéristiques
SoC
Microcontrôleur Raspberry Pi RP2040 double cœur Cortex-M0+ jusqu'à 125 MHz, avec 264 Ko de SRAM
Stockage
Flash SPI de 2 Mo
Afficher
OLED de 0,42 pouce
USB
1x port USB Type-C pour l'alimentation et la programmation
Expansion
– Connecteur Qwiic I²C – Embases à 7 et 8 broches avec jusqu'à 11x GPIO, 2x SPI, 2x I²C, 4x ADC, 1x UART, 5 V, 3,3 V, VBAT, GND
Divers
– Boutons de réinitialisation et de démarrage – LED RVB, LED d'alimentation
Source de courant
– 5 V via port USB-C ou Vin - Broche VBAT pour l'entrée de la batterie – Régulateur 3,3 V avec sortie crête 500 mA
Dimensions
23,5x18mm
Poids
2,5g
Téléchargements
GitHub
Vous trouverez ici toutes sortes de pièces, composants et accessoires dont vous avez besoin dans différents projets, depuis les simples fils, capteurs et écrans jusqu'aux modules et kits déjà pré-assemblés.